 浅谈新机器人如何通过透视墙壁抓取目标
浅谈新机器人如何通过透视墙壁抓取目标
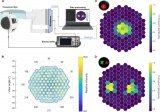
据外媒报道,机器人现在经常被用于从货运仓库挑选购买的物品,但大多数机器人仍无法透过墙壁看到东西。也就是说,一个新的机器人基本上能做到这一点,只需要一点外界的帮助。 这种被称为RF-Grasp的实验装置由麻省理工学院的Fadel Abid副教授领导的一个团队设计。
机器人本身配备了一个铰接式抓取臂,手腕上则安装了一个光学摄像头,它可以根据目标物体的外观识别目标物体。然而如果这个物体在墙的另一边的一个箱子里--或被埋在箱子里的其他物品下面--机器人就会看不到从而导致无法找到。
为了解决这个问题,研究人员在机器人操作的区域设置了一个单独的射频收发器。该设备会发出无线电信号,这些信号则会被目标物体上的射频标签反射回来--即使是穿过墙壁。就像其他现有的RFID系统一样,标签以一种独特的方式调制返回信号、传递信息如它的位置和它所附着的东西。
一旦无线电收发器确定了物品的位置,它就会将信息无线传输给RF-Grasp机器人。当到达那个大致的位置,机器人就用它的摄像机从视觉上引导它的手臂然后将杂物移到一边,一直到它发现并抓住想要的物体。
Adib说道:“它首先使用射频来聚焦视觉关注。然后你就可以用视觉来导航。”
编辑:lyn
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28444浏览量
207197 -
射频收发器
+关注
关注
4文章
256浏览量
25401
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
。
多模态融合的创新与突破
机器人控制技术的另一个重要突破在于多模态大模型的应用。相比于仅通过文字进行人机交互的传统方法,现代机器人能够融合视觉、声音、定位等多模态输入信息,为任务执行提供更加全面的感知
发表于 12-29 23:04
新型复眼结构有望革新机器人视觉系统
的灵敏度较现有市售产品高出两倍以上。这一突破有望革新机器人视觉系统、增强机器人的导航、感知和决策能力,并为人机协作开拓了更广泛的商业应用和未来发展空间。 研究团队(香港科技大学) 该创新系统模仿生物复眼的视觉
【「具身智能机器人系统」阅读体验】+初品的体验
的快速发展,相关人才的需求也在不断增加,通过阅读该书可以帮助大家系统性地了解和分析当前具身智能机器人系统的发展现状和前沿研究,为未来的研究和开发工作提供指导。此外,本书还可以为研究人员和工程师提供具体
发表于 12-20 19:17
从市场角度对机器人的基本解读
体现,正确引导大家对机器人市场化研发目标的方向。通过8年多对实际市场的认知了解。现就机器人“市场化”的基本解读分享如下:1机器人的定义:

NVIDIA在ICRA展示最新机器人研究
在 日前举行的 IEEE 国际机器人和自动化大会(ICRA)上,几何织物(geometric fabrics)成为一个热门的讨论话题。几何织物是 NVIDIA 机器人研究实验室成员与合作者共同提交的七篇论文的主题之一,并于 ICRA 上发表。
智能移动机器人
富唯智能移动机器人分为复合机器人和转运机器人,搭载ICD核心控制器,实现一体化控制,最快可实现15分钟现场机器人的快速部署,无缝对接产线,配合自研2D/3D视觉系统,精准

工业机器人视觉技术的应用分为哪几种?
,机器人可以识别和定位物体的位置、形状、颜色等特征。这些信息可以用于机器人的导航、抓取、装配等任务。 1.1 颜色识别 颜色识别是物体识别的一种常见方法。通过分析物体表面的颜色信息,
Al大模型机器人
丰富的知识储备。它们可以涵盖各种领域的知识,并能够回答相关问题。灵活性与通用性: AI大模型机器人具有很强的灵活性和通用性,能够处理各种类型的任务和问题。持续学习和改进: 这些模型可以通过持续的训练
发表于 07-05 08:52
码垛机器人的组成和工作原理
几个部分组成: 1、机身:码垛机器人的机身通常由机械臂、底座、控制系统等部件组成,用于支撑和移动物品。 2、抓取机构:码垛机器人的抓取机构通常由夹爪、电磁吸盘等组成,用于夹取和移动
大象机器人完成Pre-B轮融资,致力打造全新机器人生态!
近日,深圳市大象机器人科技有限公司(以下简称「大象机器人」)近日完成Pre-B轮融资,本轮融资由清辉投资领投、云卓资本跟投,资金将用于人形机器人产线升级及持续研发迭代。义柏资本担任长期独家财务顾问。
使用NVIDIA Isaac Manipulator生成抓取姿势和机器人运动
NVIDIA 宣布与 Intrinsic.ai 就工业机器人任务的基础技能模型学习展开合作。

机器人焊接与人工焊接对比分析
。本文创想焊缝跟踪器小编将对这两种焊接方式进行对比分析。 一、成本 在成本方面,机器人焊接需要较大的初期投入。机器人本身的购置费用以及安装、调试等费用都相当可观。此外,维护和更新机器人所需的费用也不容忽视。相比

机器人视觉定位抓取技术原理总结
首先,摄像头的“眼睛”会捕捉到目标物体的图像信息,无论是简单的形状还是复杂的纹理,都会被一一记录下来。这些图像信息随后被转化为电信号,传递给机器人的“大脑”——图像处理系统。
发表于 01-26 09:27
•1389次阅读
富唯智能机器人集成了协作机器人、移动机器人和视觉引导技术
富唯智能移动机器人是一款拥有自主导航能力和物料转移抓取功能的智能机器人,采用先进的无线通信技术和高精度传感器,能够实现自主导航和避障,完成生产线上的物料转运任务,并与其他设备实现无缝对接。此外,富唯





 工商网监
工商网监
评论