 关于Ardupilot移植的经验分享
关于Ardupilot移植的经验分享
Ardupilot移植经验分享(1)简要介绍了移植Ardupilot的思路,重点讲述了下载编译源码的要点和搭建源码阅读环境的方法。下载编译源码,一方面是为了搭建源码阅读环境,另一方面是当阅读源码遇到疑问时,可以稍作修改后进行调试验证。搭建便捷高效的源码阅读环境,更是非常重要。若是选择的源码阅读器不能进行函数跳转,不能查看函数调用栈,不能快速导航到目标函数或变量,阅读70万行ardupilot代码的工作将寸步难行。这就是笔者花费很大的篇幅来讲解的原因,没看过第一篇的同学先点击上面的链接噢。
下面开始阅读源码之旅。刚才提到,ardupilot工程有700k行代码,这个统计出版官方开发者wiki。
虽然庞大的体量令人望而生畏,但若明确了目标,把握了脉络,阅读也非难事。下面让笔者按着当初的思路,分享阅读的步骤和要点,带领大家体验一次奇妙的阅读之旅。
下面的内容分为三个部分:
明确目标
把握脉络
深入细节
明确目标
我们的最终目标是通过底层适配的方法,移植ardupilot到自己的硬件平台。不清楚底层适配的同学,请看Ardupilot移植经验分享(1)的“移植Ardupilot的方法有两种”部分。而阅读源码的目标,也就非常简单,即要搞清楚如何进行适配:
要适配哪些接口(或者说函数)?
实现这些接口时,可参考哪些代码?
会不会有难以实现的接口?
明确了这几个问题,可以帮我们缩小阅读的范围。我们并不需要真去阅读那700k行代码,而是围绕移植,这个中心目标,有目的有范围地进行阅读。
前篇文章介绍ardupilot时,提到代码分为5个部分,笔者带领大家回忆下最重要的3个:
载具代码:业务层的代码,比如飞行器初始化,飞行模式控制。
共享库:libraries中除以AP_HAL开头的所有子目录。包含传感器驱动,姿态位置估算与控制。
硬件抽象层(HAL):libraries中以AP_HAL开头子目录,如AP_HAL, AP_HAL_PX4, AP_HAL_Linux。
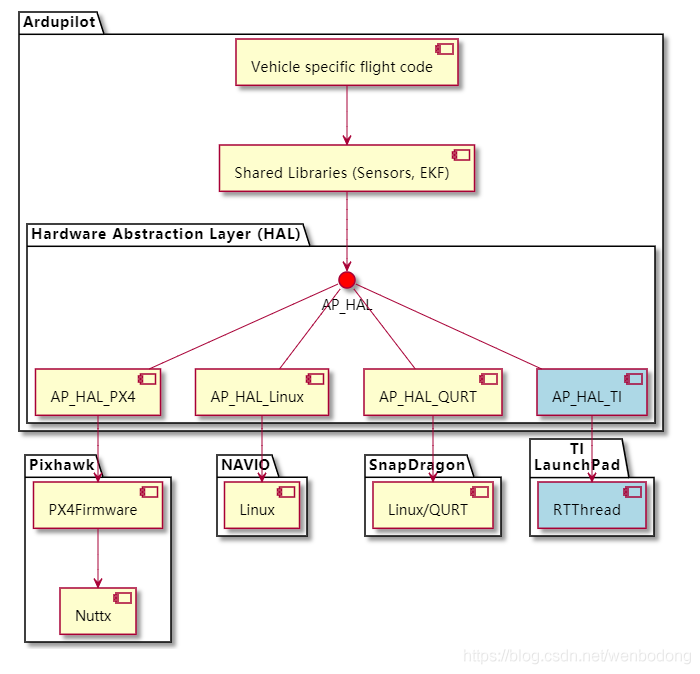
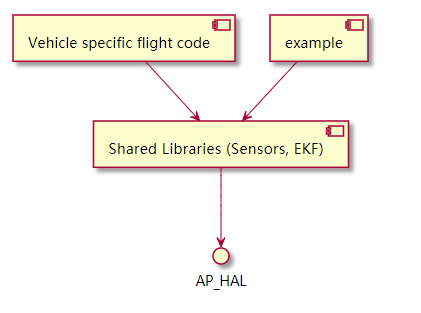
明白了这三块之间的相互关系,上述问题就迎刃而解。一图以蔽之:
UML图示说明
本文多处使用UML图来展示ardupilot的框架和流程,有些遵循标准语法,有些则是笔者自己习惯。无论如何,为方便大家理解,笔者会在第一次出现该种图示时做必要说明。
上述是UML组件图,非标准语法。
实线箭头表示使用,比如Vehicle specific flight code使用Shared Libraries。
实线表示关联。AP_HAL_PX4实现了AP_HAL接口,准确说是继承的关系。不过笔者在UML类图中才见过继承的语法,所以这里仅使用实线。
我们要实现的是AP_HAL接口,是上图中的红色圆圈。现有的实现有AP_HAL_PX4(对应Pixhawk平台),AP_HAL_Linux(对应NAVIO)。我们要添加一个平台,为图中蓝色部分,即AP_HAL_TI。
阅读的重点也就确定了:
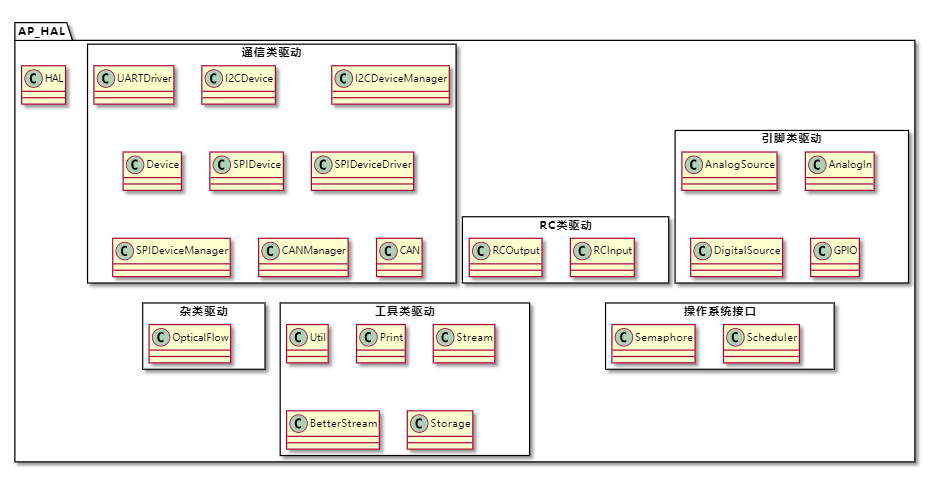
搞清楚AP_HAL的每一个接口,位于libraries/AP_HAL。
参考AP_HAL_PX4的实现,位于libraires/AP_HAL_PX4。
不过若想完成移植大业,仅阅读这两块内容是不够的。
AP_HAL接口被飞控业务代码以及共享库调用,有些接口确切的功能必须结合具体的使用场景才能搞清楚。并且,想让飞行器飞起来,还是要跑业务代码。在这过程中遇到异常时,若完全不了解业务代码,那将很难定位问题。
AP_HAL_PX4依赖于底层平台(PX4Firmware)所提供的功能。当你想参考AP_HAL_PX4是如何实现某个接口的时候,你可能会发现它只是简单地把任务交给了PX4Firmware。当然,这只是少数情况。参考大部分的实现时,看AP_HAL_PX4本身的代码就足够了。
因此,除了重点阅读AP_HAL和AP_HAL_PX4外,我们需要适当的向上和向下延伸。尤其是向上,掌握飞控业务代码的整体框架,在需要深入某个细节时,至少要知道去哪儿看。
把握脉络
在深入了解HAL的每一个接口之前,我们需要先了解程序的整体框架。
main函数在哪儿?
了解整体框架的第一步,莫过于找到程序入口。
主函数的定义位于ArduCopter/ArduCopter.cpp的结尾处。
AP_HAL_MAIN_CALLBACKS(&copter);
AP_HAL_MAIN_CALLBACKS用于定义主函数。
#define AP_HAL_MAIN_CALLBACKS(CALLBACKS) extern “C” {
int AP_MAIN(int argc, char* const argv[]);
int AP_MAIN(int argc, char* const argv[]) {
hal.run(argc, argv, CALLBACKS);
return 0;
}
}
主函数的名称不一定是大家熟悉的main,对于pixhawk平台来说,其是Ardupilot_main。
#if CONFIG_HAL_BOARD == HAL_BOARD_PX4 || CONFIG_HAL_BOARD == HAL_BOARD_VRBRAIN
#define AP_MAIN __EXPORT ArduPilot_main
#endif
经过预编译后,其最终的形态如下,这就是ardupilot的主函数。
extern “C”
{
int __attribute__ ((visibility (“default”))) ArduPilot_main(int argc, char* const argv[]);
int __attribute__ ((visibility (“default”))) ArduPilot_main(int argc, char* const argv[])
{
hal.run(argc, argv, &copter);
return 0;
}
}
也许你会疑惑,为什么要如此大费周章地定义主函数呢?
首先,主函数的名称依平台而定,这肯定是要用宏的。
其次,ardupilot项目不仅仅是ArduCopter,它还有APMrover2,AntennaTracker,ArduPlane和ArduSub,即ardupilot工程有多个入口函数,在编译时根据目标类型来选择。使用AP_HAL_MAIN_CALLBACKS来定义,可避免重复代码,并且后续修改时只需要修改AP_HAL_MAIN_CALLBACKS宏即可。
放一起看下效果:
ArduCopter/ArduCopter.cpp
AP_HAL_MAIN_CALLBACKS(&copter);
ArduSub/ArduSub.cpp
AP_HAL_MAIN_CALLBACKS(&sub);
如果你想知道笔者是如何找到这个入口的,请看寻找ardupilot的main函数。
HAL引用
ArduPilot_main中只有一行关键代码:
hal.run(argc, argv, &copter);
hal是HAL实例的引用,这个引用定义在Copter.cpp中。
const AP_HAL::HAL& hal = AP_HAL::get_HAL();
get_HAL()函数为业务层提供获取HAL实例的接口,其在AP_HAL_Namespace.h中声明,由HAL_PX4实现。
libraries/AP_HAL/AP_HAL_Namespace.h
// Must be implemented by the concrete HALs.
const HAL& get_HAL();
libraires/AP_HAL_PX4/HAL_PX4_Class.cpp中实现了get_HAL函数,其创建并返回HAL实例。
const AP_HAL::HAL& AP_HAL::get_HAL() {
static const HAL_PX4 hal_px4;
return hal_px4;
}
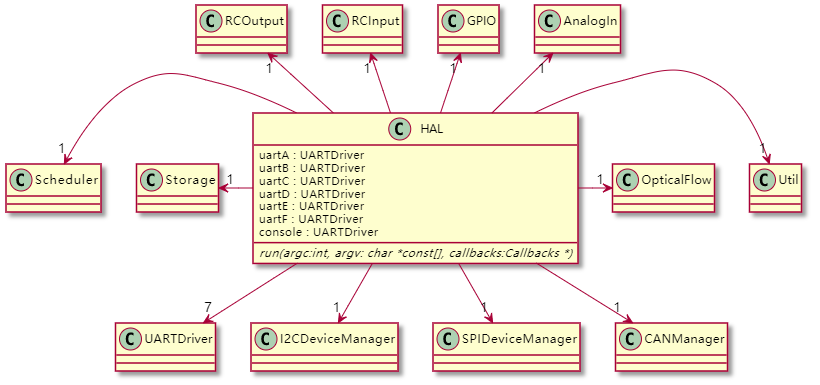
HAL类是硬件抽象层(HAL)的一个集合类,它包含了对硬件抽象层其他类的实例的引用。HAL类、get_HAL()以及HAL类引用的其他类,声明在AP_HAL命名空间中。具体可查看AP_HAL_Namespace.h,这里就不贴代码了,给张类图:
HAL类定义在HAL.h中,它用于管理其他各种类的实例,从而为业务层提供便捷的访问。
UML图示说明
上图为UML类图。每一个带C标记的方框表示一个类。方框中可添加成员变量和函数的说明。
成员变量的格式为:name:type
成员函数的格式为:name (parameter-list) : return-type,每一个形参的格式为:name:type
除了在方框中定义成员变量,还可以使用箭头指向类的方式来表示。所以,上图展示出HAL类中有着各种驱动类的实例。
业务层在获得了hal后,就可以通过它访问具体的驱动接口,比如说:
使用hal.console-》printf()打印日志
使用AP_HAL::millis()和AP_HAL::micros() 获取上电启动到现在所经过的时间
使用hal.scheduler-》delay() 和 hal.scheduler-》delay_microseconds() 睡眠一定的时间
使用hal.gpio-》pinMode(), hal.gpio-》read() 和 hal.gpio-》write() 访问GPIO引脚
通过hal.i2c_mgr访问I2C设备
通过hal.spi访问SPI设备
AP_HAL_PX4框架
libraries/AP_HAL之中定义的是HAL接口,顺带着介绍下其实现。
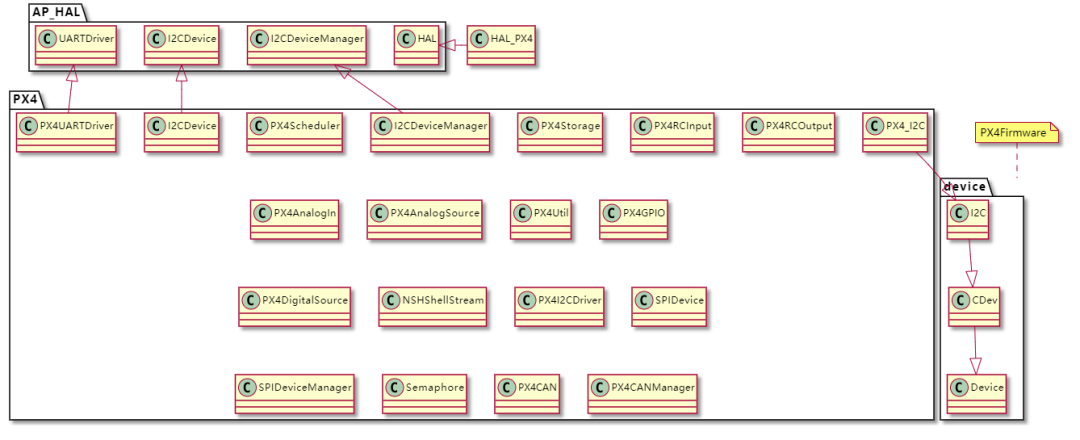
PX4的实现位于libraries/AP_HAL_PX4之中,其结构为:
定义了PX4命名空间,基本上所有驱动类位于其中。
每一个AP_HAL空间中的驱动类,都在PX4空间中能找到实现。比如PX4UARTDriver继承自UARTDriver,实现了其定义的全部接口。
HAL_PX4类继承自HAL类。
PX4中的驱动类依赖于PX4Firmware中间件以实现具体的驱动功能,比如PX4_I2C继承自PX4Firmware中的I2C类。
下图描述了AP_HAL空间,PX4空间以及PX4Firmware的关系。只绘制了少部分AP_HAL中的类以做示意。若全放出来的话,那这图就没法儿看了。
HAL_PX4的初始化详见其构造函数,在HAL_PX4_Class.cpp之中
HAL_PX4::HAL_PX4() :
AP_HAL::HAL(
&uartADriver, /* uartA */
&uartBDriver, /* uartB */
&uartCDriver, /* uartC */
&uartDDriver, /* uartD */
&uartEDriver, /* uartE */
&uartFDriver, /* uartF */
&i2c_mgr_instance,
&spi_mgr_instance,
&analogIn, /* analogin */
&storageDriver, /* storage */
&uartADriver, /* console */
&gpioDriver, /* gpio */
&rcinDriver, /* rcinput */
&rcoutDriver, /* rcoutput */
&schedulerInstance, /* scheduler */
&utilInstance, /* util */
nullptr, /* no onboard optical flow */
nullptr) /* CAN */
{}
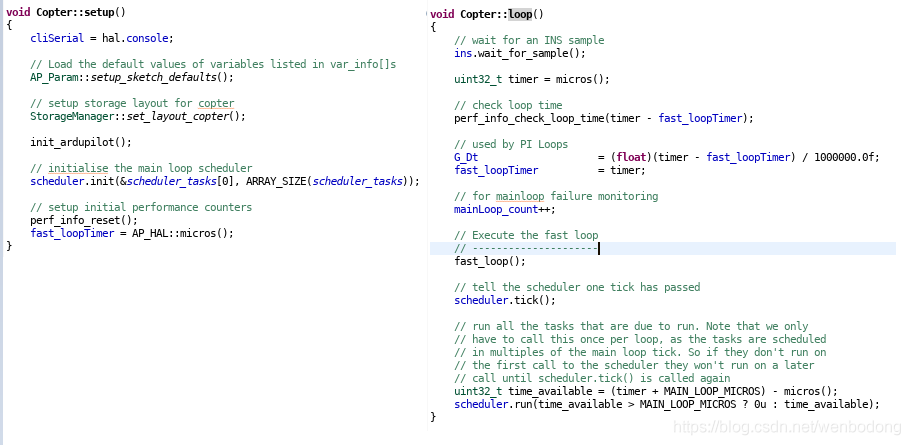
setup()和loop()
ArduCopter的主要工作,在setup()和loop()中执行。setup()进行初始化,而loop()如其名称一样,将被底层循环调用,以主持飞行工作的大局。
搞清联系
至目前为止,我们了解了程序框架的4要素,它们是:
程序入口:AP_HAL_MAIN_CALLBACKS(&copter)
随处可用的hal引用:const AP_HAL::HAL& hal = AP_HAL::get_HAL();
setup()
loop()
我们知道setup()会被底层调用一次,还知道loop()会被底层循环调用。不过它们是在哪儿被调用的呢?这与AP_HAL_MAIN_CALLBACKS定义出的入口函数有什么关联吗?如果不搞清楚这些问题,笔者觉得并不算是掌握了脉络。好的,现在笔者来深入剖析它们的关系。
setup,loop和底层的关系是这样的:
Callbacks接口定义了两个纯虚函数setup和loop。
ArduCopter.cpp中定义了Copter类,继承Callbacks接口,所以Copter的实例就是Callbacks对象。
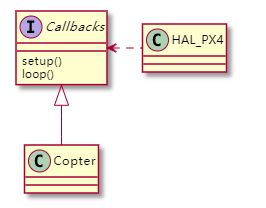
ArduCopter.cpp将创建出的Callbacks对象传递给HAL_PX4,以供其调用。就是ArduPilot_main中的那行代码:
hal.run(argc, argv, &copter);
具体的调用流程是这样的:
AHRS_Test.cpp通过宏AP_HAL_MAIN定义出了Ardupilot_main()。
上电启动后,硬件平台调用Ardupilot_main()。
Ardupilot_main()调用HAL层的入口函数HAL_PX4::run(),并将自己的Callbacks对象传递给它。
HAL_PX4::run()调用了自己的main_loop()。
main_loop先调用AHRS_Test.cpp的setup()进行业务初始化。
main_loop循环调用AHRS_Test.cpp的loop(),直到断电。
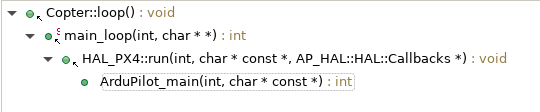
一图以蔽之
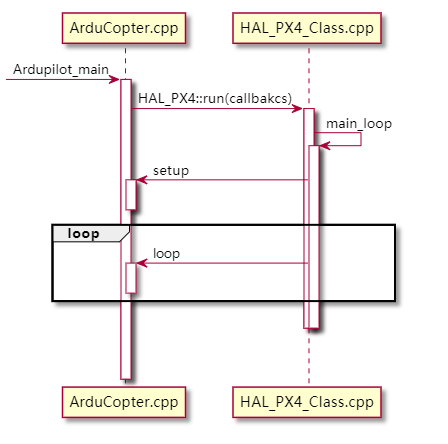
也可以用eclipse的查看调用栈功能来展示:
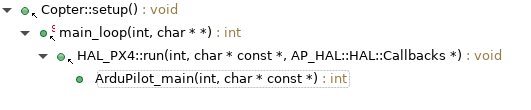
看完上述内容,是不是感觉有点复杂呢。笔者来总结一下:
首先,记住两点最关键的:
ArduCopter代码定义setup()和loop(),setup()进行初始化,而运行时的主要工作是在loop()之中。
HAL_PX4_Class负责程序调度,即调用setup()和loop()。
不过呢,有点绕的是:HAL_PX4_Class并不提供程序入口,程序入口由ArduCopter提供,它们会定义Ardupilot_main()。由Ardupilot_main()启动HAL_PX4_Class。
为什么不由HAL_PX4_Class来定义程序入口?再想想?因为程序有很多可选入口嘛。还记得APMrover2,AntennaTracker,ArduPlane和ArduSub吗。
深入浅出
我们了解了程序框架的4要素,并且深入研究了它们之间的调度逻辑,是时候“浅出”一下了。我们来看一个ardupilot里面的example。
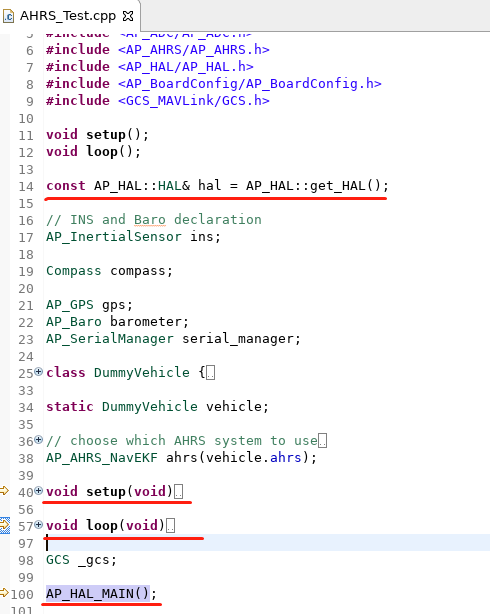
为一览全貌,笔者折叠了很多代码块。大家发现什么了没?程序4要素都在其中。example是独立于业务代码之外,可单独运行的代码。其与业务代码处在相同的层次上,它们都依赖于共享库和HAL。
AHRS_Test.cpp是姿态解算的示例。ardupilot工程中有各种示例代码,有AP_HAL驱动的example,也有各种共享库的example,有两个作用:
演示功能模块的用法。
对功能模块进行测试。当我们实现了新平台的HAL接口时,使用example来验证,远比直接跑业务代码要方便有效。
在工程根目录下查找所有示例:
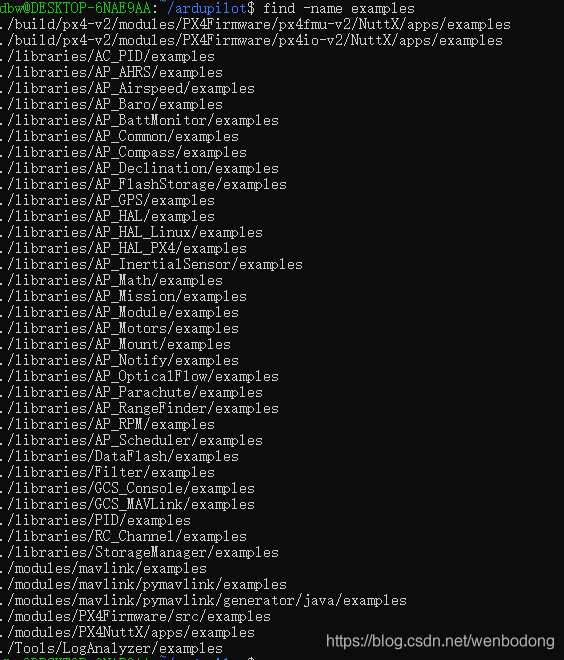
怎么用这个示例呢,使用如下命令编译固件并上传:
。/waf build --target examples/AHRS_Test --upload
ardupilot是单线程的吗?
看了由setup()和loop()组成的框架,你可能会认为ardupilot是单线程的。早期的ardupilot跑在ardunio上,setup()和loop()就是历史的痕迹。那时的ardupilot确实是loop外加一个定时器回调,算是2个线程。
从pixhawk开始,这一切就不同了。pixhawk平台的底层系统是Nuttx实时操作系统,其支持带优先级的多线程功能,而AP_HAL_PX4充分利用了这一特性。请看笔者呕心沥血绘制的高清大图(请在新标签页中打开图片):
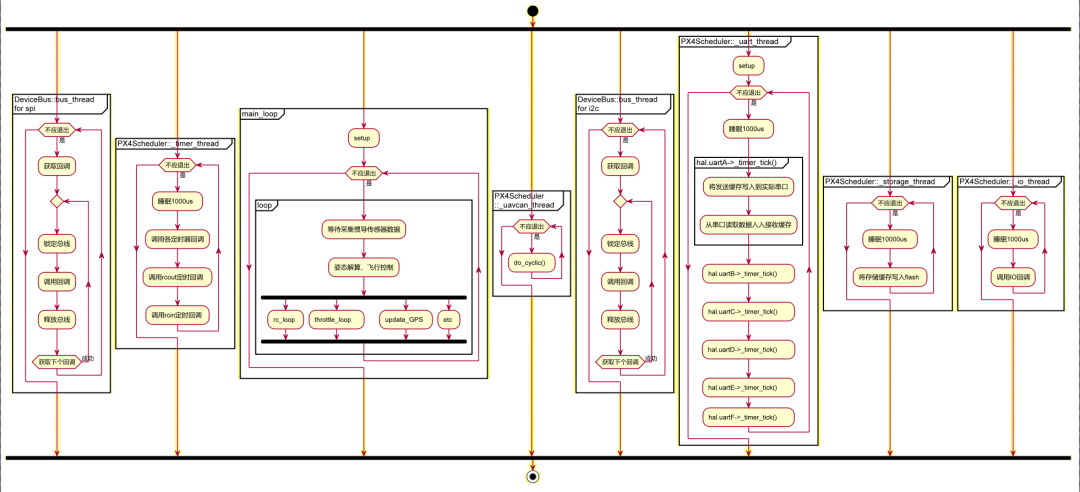
上图展示了各个线程的大体框架,左边线程的优先级大于右边的。除了main_loop和timer_thread,还有许多其他的线程。最多的是总线通信线程,有SPI, I2C, CAN, Uart。也可通过下表进行了解,优先级的数值越大代表优先级越高。
名称优先级定时间隔函数名说明
bus242
DeviceBus::bus_thread用于SPI
timer1811msPX4Scheduler::_timer_thread
main1802.5msmain_loop主线程
uavcan1791msPX4Scheduler::_uavcan_thread
bus178
DeviceBus::bus_thread用于I2C
uart601msPX4Scheduler::_uart_thread
storage5910msPX4Scheduler::_storage_thread
io581msPX4Scheduler::_io_thread
main_loop里面的并行实际上是一个伪并行,由ardupilot自己设计的AP_Scheduler系统来进行调度。这里就不展开了,后续有机会的话会单独介绍。
深入细节
不知不觉写了好多,下一篇再讲具体的HAL接口。对了,讲解移植流程,就得等Ardupilot移植经验分享(4)了。
原文标题:Ardupilot移植经验分享(2)
文章出处:【微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
代码
+关注
关注
30文章
4802浏览量
68738
原文标题:Ardupilot移植经验分享(2)
文章出处:【微信号:RTThread,微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
多平台FPGA工程快速移植与构建

外设移植 安信可Ai-WB2+FPM383C指纹

基于机智云移植STM32L496G代码移植

【GD32 MCU 移植教程】9、从 STM32F10x 系列移植到 GD32F30x 系列
【GD32 MCU 移植教程】8、从 STM32F4xx 系列移植到 GD32F4xx 系
【GD32 MCU 移植教程】5、GD32E230 系列移植到 GD32F330 系列

手把手带你移植HAL库函数

【AWTK使用经验】加载和释放外部图片

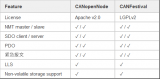
基于MM32G5330的FlexCAN实现CANopenNode协议栈移植
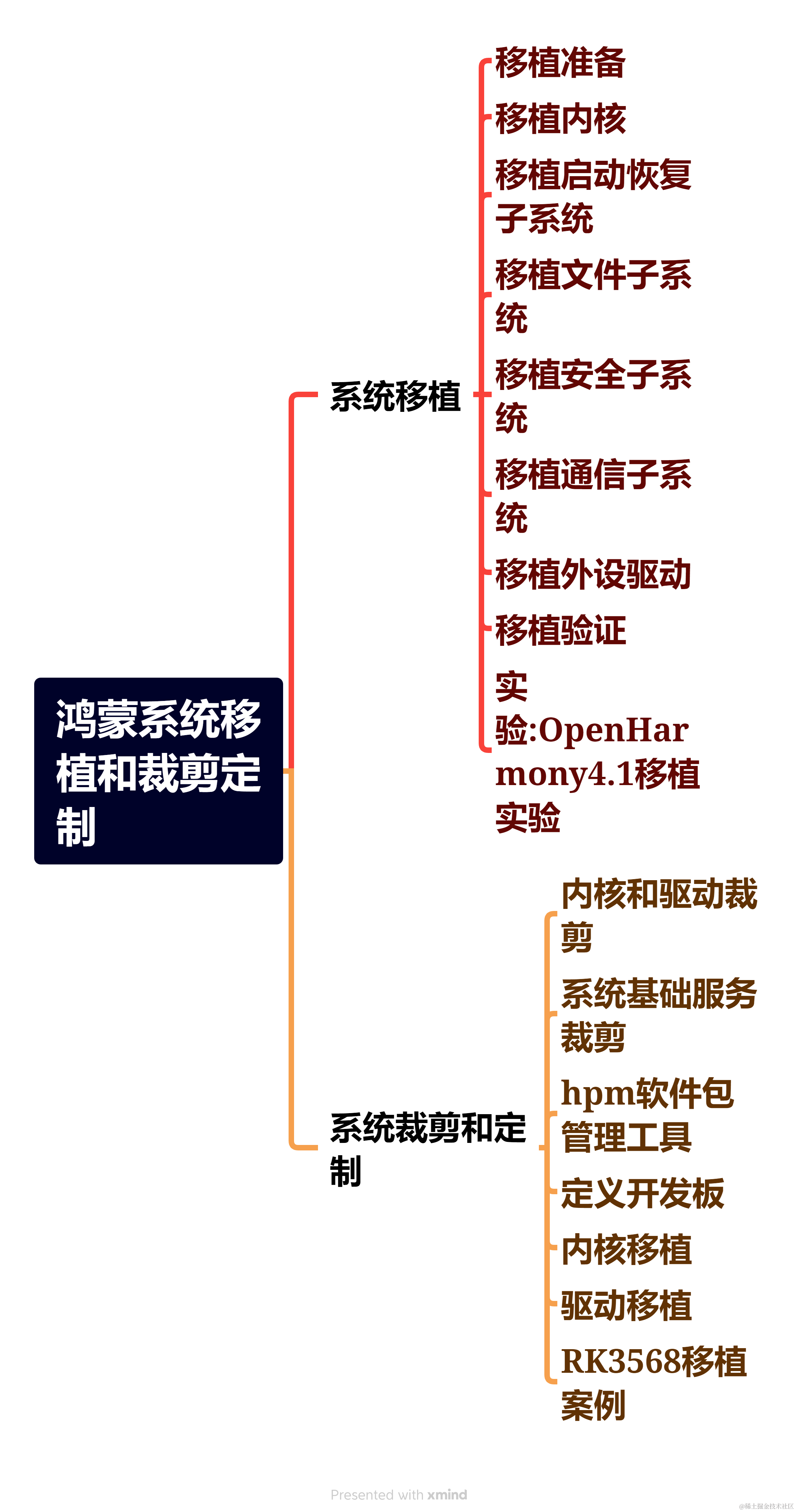
【鸿蒙】标准系统移植指南






 工商网监
工商网监
评论