 基于使用Arduino板及电机驱动器对机器人进行编程介绍
基于使用Arduino板及电机驱动器对机器人进行编程介绍
我的项目是一个简单的直线跟随器机器人。顾名思义,它是可以跟随直线的机器人。在这种情况下,它是白色表面上的黑线。在本教程中,我将解释如何制作追随者机器人,并展示由我自己制造的机器人。
我决定以娱乐为目的。我从RoboIndia购买了Arduino入门套件。无需使用该套件即可制作。但是,这样做很容易,因为您不必搜索单个组件。
这是必需组件的完整列表:
1.底盘-通常必须购买底盘,但也可以是木材,您可以自行购买。
2.Wheels-这些通常必须是橡胶轮。
3.电池盒-用于放置电池并运行机器人。应该适合6节AA电池。
4. Arduino开发板
5.电机罩。一个简单的电动机罩就足够了,并且有用于连接到Arduino板的地方。通常,由于电动机屏蔽板与Arduino板直接连接,因此,如果您将某些东西连接到电动机屏蔽板上的引脚,则它将连接到Arduino板。
7. BO电机:-这些是实际上将用于转动车轮的电机。其中2个就足够了。
8.脚轮-这是超市手推车中使用的轮子。
现在,让我们开始制造机器人!组装起来并不难。所有需要做的就是将轮子放在机器人下面。红外传感器的放置方式应使其上的两个LED面向机器人将要运行的表面。HC SR04应该放置在您认为可以检测到其他物体的地方。最好在更高的地方比较好,尽管这完全取决于您。电池组可以放置在任何地方。我将其连接在主机架下。
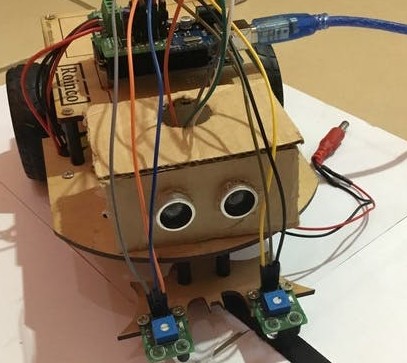
在这里,您可以看到红外传感器朝下,HC SR04被一个盒子包围,而Arduino板在顶部。
从组件到电路板的连接非常重要。电机应连接到电机驱动器。我的是L293D。
在BO Motors中,一根线用于向后移动,而另一根线用于向前移动。因此,在将电线连接到电动机屏蔽罩时,通常最好将同一电动机的两条电线彼此相邻连接。我的电机护罩是从RoboIndia购买的,带有用于放置电线位置的标签。
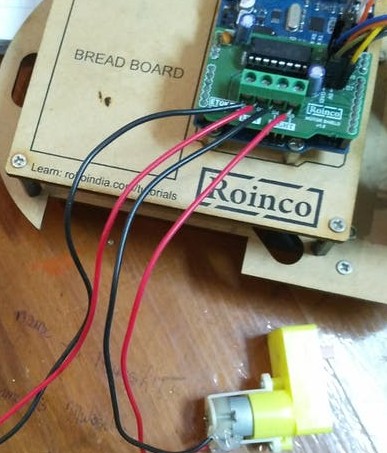
电机连接到电机护罩
所有其他组件必须正常连接。它们可以连接到Arduino或电动机护罩,因为许多电动机护罩已经连接到Arduino。您将需要确认电机屏蔽罩上的引脚号是否与Arduino上的引脚号匹配。红外传感器具有三根导线。这是将红外传感器连接到Arduino的方法:
红外线-》 Arduino
5v-》 5v
地线-》地线
D-》您想要的任何图钉。我的红外传感器连接到引脚7和8。我的左传感器连接到引脚7,我的右传感器连接到引脚8。
我的电动机屏蔽罩带有用于5v和GND的多个引脚。如果电动机护罩不是这种情况,请考虑使用面包板。这些连接很容易理解。红外传感器需要有5v的电源,然后应将其接地以完成电路。需要一个引脚来对传感器进行编程!
接下来是HC SR04的连接。如果我们可以连接它,那么我们就完成了!
HC SR04-》 Arduino的
VCC-》 5伏
回声-》任何销
触发-》任何销
我已将Echo连接到引脚10,将Trig连接到引脚9。HC SR04可以计算从它到最前面物体的距离。触发发送声音脉冲,而回声接收声音脉冲。使用为此花费的时间,可以计算出距离。但是,在我的代码中,我正在使用一个库来简化事情。
这就是设置所需要的。最后一点也是非常明显的,就是将电池放入电池盒中。现在,我们可以对机器人进行编程了。我在下面详细解释了代码。
在深入研究代码之前,必须必须了解机器人的工作方式。
• 首先测量到最近物体的距离。
• 如果距离超过29厘米,则表示机器人不会停止。
• 然后,它检查红外传感器。
• 如果左红外传感器检测到黑色,则机器人将向左移动以校正其路径。
• 如果右侧的红外传感器检测到黑色,它将向右移动以校正其路径。
• 当两个红外传感器都检测到白色时,它将向前移动。
• 最后,如果两个红外传感器都检测到黑色,它将停止。这有利于使其停止。
现在,介绍机器人如何执行动作。
• 为了向前移动,两个电动机都必须沿向前方向旋转。很简单。
• 要向右转,右马达必须停止,只有左马达必须向前旋转。
• 要向左转,左电动机必须停止,而只有右电动机必须向前旋转。
• 要停止,两个电动机都必须停止旋转。
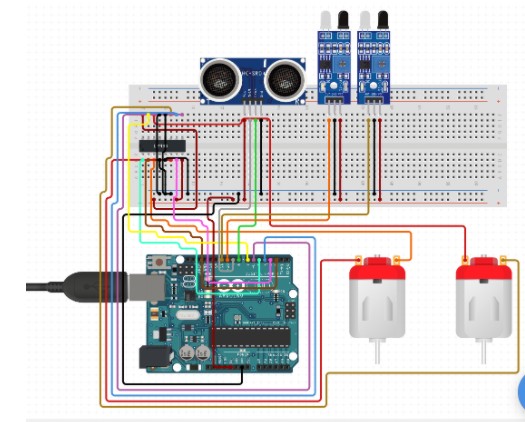
原理图:
责任编辑:pj
-
电机驱动器
+关注
关注
16文章
646浏览量
64711 -
红外传感器
+关注
关注
9文章
519浏览量
47603 -
Arduino
+关注
关注
188文章
6471浏览量
187239
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论