 基于Arduino的多功能机械臂设计方案
基于Arduino的多功能机械臂设计方案
步骤1:准备材料 下面的图片显示了您需要的所有组件。
清单:
主臂
轴
Arduino mega2560开发板
三步电动机
轴承规格:6 * 12 * 4
铜垫片规格:t厚度1.5mm
M3螺母
M5螺栓
M2 * 8内六角螺栓
M2.5 * 12内六角螺栓
M3 * 10内六角螺栓
步骤2:准备工具 您需要准备以下工具: 一个锤子 四个内六角扳手,包括M4,M3,M5和M2 一些胶水和一个尖嘴钳,用于打开M4卡扣

步骤3:将衬套和轴承添加到三个轴上 6 * 10 * 8铜套管添加到甲 轴和6 * 10 * 4铜衬套添加到乙轴,然后将6 * 12 * 4轴承添加到Ç轴线。在将这些组件添加到轴时要小心,必须确保衬套和轴承与轴垂直,否则会出现带有衬套的歪斜轴。也许您需要用锤子轻轻敲击衬套和轴承。完成这些零件后,在轴与衬套或轴承之间的接触表面上添加一些胶水,以确保在轴与衬套或轴承之间没有任何滑动。
步骤4:将三个轴与三角形链接部分连接 然后,我们将三个轴与三角形链接部分相连。首先,将φ6* 9 mm的轴添加到三角形连接部分上,然后将套管添加到连接部分中。您应注意套管的方向。其次,在轴上添加一个0.7mm的尼龙垫圈。第三,将带有衬套的A轴和B 轴分别添加到链接部分,并且必须注意两个轴的方向。图中显示了轴的正确方向。然后我们分别使用两个捕捉来固定A和B轴。

步骤5:将平行支撑部分与B轴连接 用两颗M3 * 10螺钉将小块与平行支架的主要部分固定在一起。将φ6* 14轴添加到A轴的另一侧,并在其中添加0.7mm的垫圈。完成这些步骤后,在右侧添加平行支撑,然后使用两个卡扣将其固定。
步骤6:将手臂的头部与A轴的另一侧连接 首先,将手臂的头部与A轴的另一侧放在一起,并在其中添加两个0.7mm的垫圈。然后,将6 * 10 * 6铜套放在正确的位置,并通过孔添加φ6* 18的轴。正确的位置是什么意思?这意味着当您看着前方的手臂时,铜套位于A轴的左侧和手臂头部的右侧之间,而两个垫圈在另一侧。然后我们再次用两个快照修复它们。
步骤7:组装小臂 首先,将6 * 12 * 4轴承添加到轴承衬套,然后将轴承衬套添加到小臂的小侧。其次,在小臂的大侧上添加6 * 10 * 4铜套,并且应注意轴承衬套,我们应确保其稍微伸入小臂的内侧,另一侧是用小臂水平。最后,我们应放一些胶水以固定轴承和轴承衬套。
步骤8:将C轴与小臂和小臂驱动部件组装在一起 首先,在C轴和带轴承衬套的小臂侧面之间放置两个1毫米的垫圈。其次,将φ6* 12轴穿过孔,然后用两个卡扣将其固定。第三,在C轴和小臂驱动部件之间放置一个1毫米的垫圈,然后将φ6* 12轴穿过孔并固定有两个快照。完成这些步骤后,应使用两个M 2.5 * 10螺钉将联轴器与小臂驱动器部件固定在一起。现在,我们完成了Dobot臂的主要部分。
步骤9:用小臂和小轴组装主臂 此步骤可能会有些复杂,因此在组装这些零件时应格外小心。首先,我们使用两个M2.5螺钉将联轴器与主臂固定,并确保联轴器在主臂的左侧。 其次,将一个按扣固定在φ6* 42轴上,并将其放入手臂绑架装饰板中,然后将其与主臂组装在一起。 第三,在轴上放两个0.7毫米的垫圈,并在左小臂上加上轴承衬套的一面。 第四,将步骤6中的精加工轴部分添加到φ6* 42轴,并确保带套筒的三角形连接部分与φ6* 42轴连接。 第五,将在步骤8中完成的C轴小臂添加到φ6* 42轴,并确保套筒与该轴连接,并且带联轴器的小臂驱动部件在下面,并在φ6上添加两个0.7 mm垫圈* 42右小臂轴。 第六,用φ6* 42轴固定右主臂,然后将主臂绑架装饰板与主臂放在一起,然后按一下就拧紧。
步骤10:完成主要零件的组装 现在,我们将四个φ6* 2小圆形块放入手臂绑架装饰板上的孔中,然后添加一些胶水将其固定。完成后,我们将把臂头与小臂组装在一起。首先,在臂头的左侧和右侧分别放置一个0.7mm的垫圈,然后放置φ6* 30轴。最后,使用两个卡扣固定它们,并使用约32个铜柱和M3 * 5螺钉固定主臂和小臂,我们都完成了组装Dobot臂主要部分的工作。
步骤11:建立底垫和底马达 用4个M3螺钉固定轴承垫环和Dobot臂的基座,然后将大推力轴承放在垫上。用4颗M4 * 6螺钉将电动机垫与DB-E02步进电动机组装在一起,然后将联轴器与步进电动机固定。用两个螺丝将步进电机固定在底座上。我们必须小心联轴器,以确保我们可以稳定地拧紧电动机,以使联轴器的下端与电动机轴的倒角边缘保持水平。
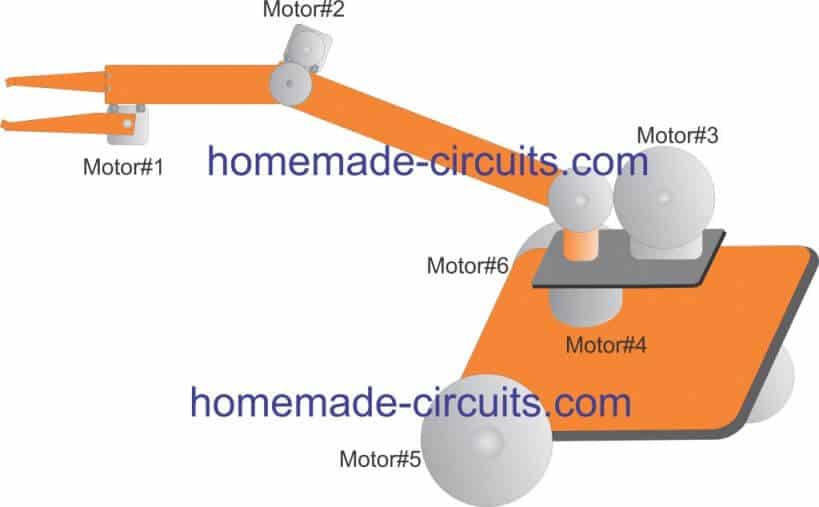
步骤12:建立左右支撑 现在,让我们分别将左右DB-E01步进电机与联轴器分别安装在主臂和小臂驱动部件上,并用两个M3螺钉将它们固定。我们用8 M4 * 8螺丝将电动机支架固定在底座上。完成上述工作后,我们终于完成了Dobot臂的机械部分。 Dobot手臂可以通过改变末端执行器来完成许多事情。我们可能会制作书写和绘图Dobot,激光切割,CNC Dobot和3D绘画Dobot臂。
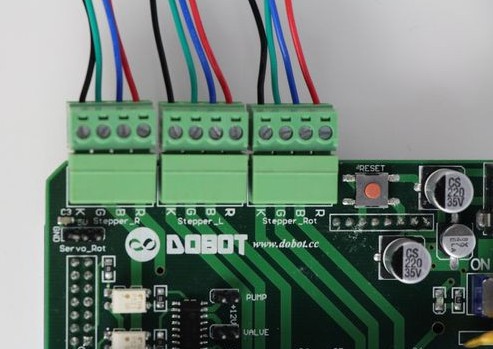
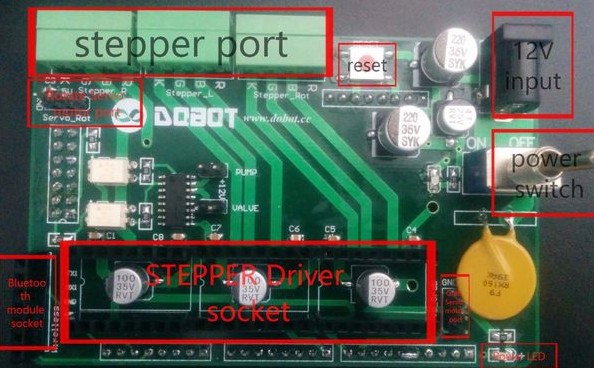
步骤13:连接电路 完成Dobot臂的机械部分后,我们应该连接Arduino控制部分的电路。 首先,将Dobot防护罩连接到Arduino MEGA2560,如图1所示。 其次,将电机驱动器插入相应的接口,如上图所示。插入后,您将获得下图所示的内容。注意旋钮的方向,请勿反向插入,否则在通电后会燃烧。 第三,插入步进电机端子。“ Steppter_R”端子用于大臂驱动电机,“ Stepper_L”连接到小臂驱动电机,“ Stepper_Rot”用于连接底盘的电机的旋转。板上丝印“ RBGK”是指分别与电动机“红色,蓝色,绿色,黑色”连接。请勿切换四线的位置,因为它们已在出厂时预设。 第四,将12V电源适配器插入图1(c)所示的插座,请注意,您需要将电源线连接到上述屏蔽端子,而不是Arduino MEGA2560端子。
步骤14:将激光切割头控制器与继电器或3D打印头和Bowden挤出机组装在一起。
最后大功告成
责任编辑:pj
-
电动机
+关注
关注
74文章
4088浏览量
95979 -
步进电机
+关注
关注
150文章
3095浏览量
147325 -
联轴器
+关注
关注
1文章
79浏览量
7169
发布评论请先 登录
相关推荐
多功能移动电源箱的设计方案
多功能贴片机的机械结构
【资料推荐】基于Arduino的PS2机械臂遥控小车(L298N)傻瓜教程

如何使用Arduino制作无线机械臂?





 工商网监
工商网监
评论