 深度解读机器人互锁及工位的释放信号的编写
深度解读机器人互锁及工位的释放信号的编写
所有夹具和机器人的释放安全信号是A/E80-57,通过PLC顺序块控制机器人工作,如上件,焊接,下件。
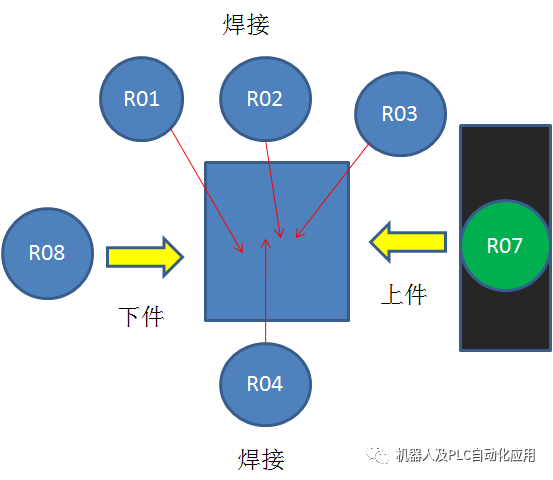
这时我们需要编写焊接机器人之间的互锁信号,以及上件机器人与焊接机器人之间的互锁信号,以及下件机器人与焊接机器人的互锁
因此一个机器人在进入程序第一步准备工作时会先释放所有机器人之间的互锁信号,让后释放和工位之间的安全信号,最后等待PLC如许进入工位焊接的释放信号。
------机器人之间的互锁信号-------
6: A47 = EIN
7: A48 = EIN
8: A49 = EIN
9: A50 = EIN
10: A51 = EIN
11: A52 = EIN
12: A53 = EIN
13: A54 = EIN
14: A55 = EIN
15: A56 = EIN
------机器人与PLC工位之间的防撞信号
17: A80 = EIN
18: A77 = EIN
19: A74 = EIN
20: A71 = EIN
21: A68 = EIN
等待PLC释放机器人开始工作
22: WARTE BIS E80 & E77 & E74 & E68
一旦PLC释放机器人开始工作,机器人会关闭与PLC的安全信号
23: A80 = AUS
24: A77 = AUS
25: A74 = AUS
26: A68 = AUS
机器人不论是否在防撞区都会等待等待防撞信号,这是大众标准处于安全作出的考虑。
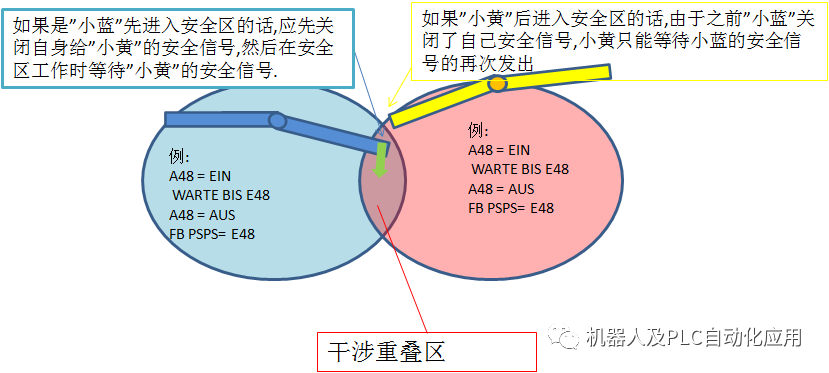
3: -- 在进入两机器人工作重叠区时需要关闭防撞区,通过PLC程序--
4: A91 = EIN
5: SPSMAKRO20 = EIN
-- 在进入两机器人工作重叠区时需要关闭防撞区,通过PLC程序–
7: A94 = EIN
8: SPSMAKRO20 = EIN 用来关闭机器人之间的防撞信号使其他机器人不能进入。
这时会增加等待机器人之间的互锁信号,因为你在进入重叠工作区时,需要相对应机器人释放出相应的安全信号,否则机器人在重叠区内将等待互锁信号。
FB PSPS = M30 & M95 & E51 & E52 & E68 & E74 & E77 & E80
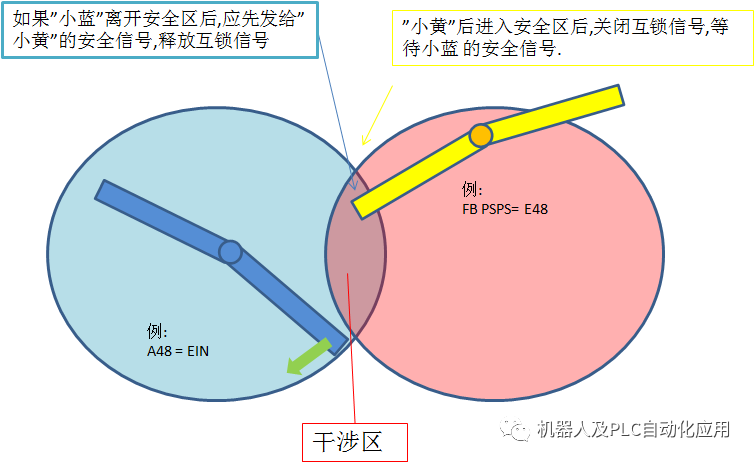
离开重叠干涉区后会发出之前关闭的互锁信号,润许相对机器人进入,同时可以不再等待与`对应机器人之间的互锁信号
5: A50 = EIN 发出释放信号
不再等待之前的互锁信号
FB PSPS = M30 & M95 & E51 & E52 & E68& E71 & E74 & E77 & E80
机器人结束工作后会释放与工位的安全信号,和机器人之间的互锁信号。
机器人于工位之间的安全信号释放
4: A80 = EIN
5: A77 = EIN
6: A74 = EIN
7: A68 = EIN
8: -- 机器人之间的互锁信号释放--
9: A51 = EIN
10: A52 = EIN
编辑:jq
-
机器人
+关注
关注
211文章
28745浏览量
208918 -
plc
+关注
关注
5019文章
13400浏览量
465957 -
焊接机器人
+关注
关注
16文章
326浏览量
15015
原文标题:机器人互锁及工位的释放信号编写
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
【「具身智能机器人系统」阅读体验】+两本互为支持的书
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
从市场角度对机器人的基本解读

地瓜机器人与广和通深度合作,共驱智能机器人商用落地

地瓜机器人与广和通深度合作,共驱智能机器人商用落地

Al大模型机器人
从市场角度简要解读“人形机器人”
从市场角度简要解读“人形机器人”





 工商网监
工商网监
评论