 解析BUFF传送连的使用调试
解析BUFF传送连的使用调试
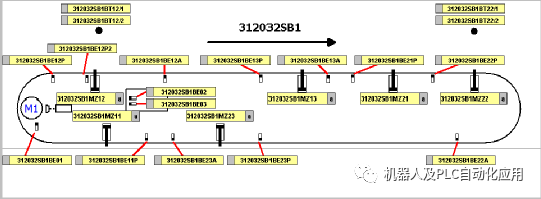
BE23A是存储区3满位的检测开关.
BE12A是存储区1满位的检测开关.
BE13A是存储区2满位的检测开关.
BE22A是存储区4满位的检测开关.
BT12零件检测
BT22零件检测
“SB1SKYP”释放按钮
1.描述:
1.MZ11停止器的R是阻挡V是放行,当托盘在MZ11上方时B11P检测托盘,此时MZ12上没有托盘,没有BT12/1和BT12/2(零件检测),这是MZ11伸出V,放行托盘当没有B11P时MZ11立刻返回R.
2.MZ23停止器: 当托盘来到停止器MZ23处时被B23P检测到后,等待MZ11在R位和BE23A信号(存储区满位信号).如果存储区没有满,MZ11在R位则MZ23伸出V,释放空托盘,当B23P检测不到零件时,MZ23返回R.
3.MZ12停止器 :当托盘正在MZ12处 ,挡在 B12P托盘检查开关 ,BT12零件检测开关有件,1区满BE12A检测开关没有被接触,当操作者拍释放按钮时“SB1SKYP”MZ 12伸出V,当B 12P 检测不到托盘后MZ 12返回R 。
4.MZ13停止器 :MZ21在原位R,BE13A第2存储区没满,BE13P上有托盘,此时可以打开MZ13停止器伸出V,BE13P无检测则MZ13返回R
5.MZ21停止器 :BE22P上无挡板,MZ21的BE21处有挡板,机器人发出释放安全信号,MZ22在原位R位,则MZ21伸出V, BE21P无托盘信号检测则MZ21返回R
6.MZ22停止器 :BE22A前方存储区满位无信号,BE22P托盘检测有信号,MZ23在返回位置R,托盘上的零件被拿走SB1/KT22, 机器人发出释放安全信号,则MZ22伸出V放行托盘, , BE22P无托盘信号检测则MZ22返回R
托盘检测的转换.
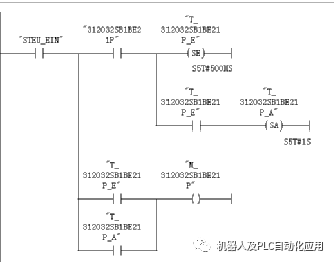
当BEXXP开关检测到零件的时候,先触发延迟接通,在触发延时断开,是为了避免出现托盘在经过时的停止器的误动作,造成夹紧发卡.
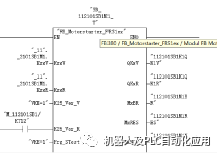
使用FB400控制各停止缸动作.
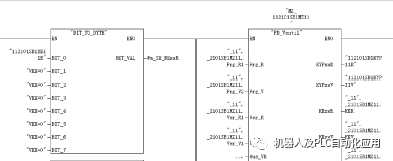
使用FB476和FB380来控制住电机旋转.
FB476
该模块用于电机的前向或后向行进控制。
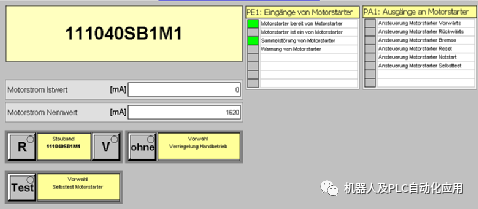
电机后向行进控制:
出现实际联锁("Ve_rR" = TRUE) 和释放“ 自动 ” 信号时,电机可在“ 后向 ”(Back)释放信号("Frg_R" = TRUE) 的作用下向后行进。释放“手动” 期间,可在可视化功能中采用实际联锁功能打开电机。
有两个选件可以控制电机后向行进:
按钮 “打开”(On) 已经显示出来 ("Cfg Bit 00"= TRUE) 。
如果“打开”(On)键显示出来,采用单击操作即可激活该键。
此后,如果按下了键“R”(后向行进),电机将向后运动(“R” 发绿色闪烁光)。如果再次按“R” ,电机将停止转动(发闪烁光,并停止)。
按钮 “打开”(On) 被隐藏 ("Cfg Bit 00" = FALSE)
如果按钮“ 打开 ”(On)未显示出来,电机将后向行进,直至按钮“R” 被按下并保持不放。松开按钮后,电机将立即停止转动。
电机前向行进控制:
出现联锁 ("Ver_V" = TRUE) 信号和释放“ 自动 ” 信号时,电机可在“ 前向 ”(Front)释放信号("Frg_V" = TRUE) 的作用下向前行进。释放“手动” 期间,可在可视化功能中采用实际联锁功能打开电机。
有两个选件可控制电机前向行进:
按钮 “打开”(On) 已显示出来("Cfg Bit 00" = TRUE)
如果出现了按钮“打开”(On),单击该按钮即可激活该键。此时,按下“V” (前向行进)按钮后,电机将前向行进(“V” 显示为蓝色闪烁)。再次按下“V”, 电机将停止运动(“ 停止” 显示为闪烁状态)。
按钮 “打开”(On) 被隐藏("Cfg Bit 00" = FALSE)
如果未显示按钮“打开”(On) ,则电机只在按下“V”按钮且保持不放的情况下前向行进。 松开按钮后,电机将立即停止转动。
FB380
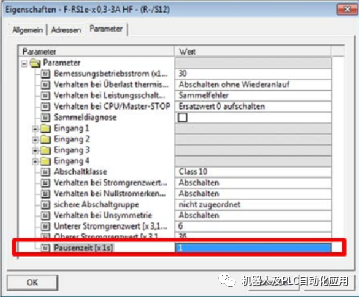
采用该块,可以利用可选 X1/X2 制动器控制装置对 RS1e-x 电机起动器进行控制。
电机起动器空闲时间
该空闲时间是为运行停机(即,不是过载脱扣)后的冷却而定义的时间。该时间结束后,电机起动器的 “热记忆”被设置成 0% 。
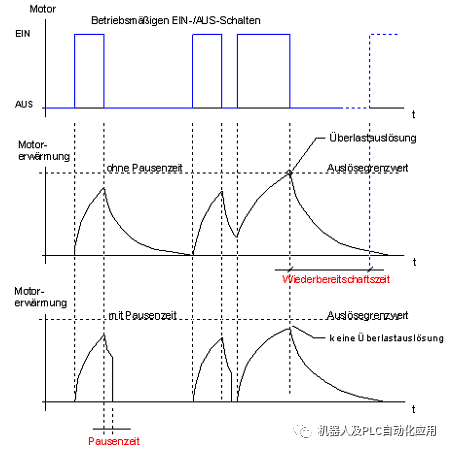
例如,对于以间隔时间定时打开和关闭的输送带(运行时间短),未成功设置空闲时间将可能因触发阈值变化而导致过载故障。
例如,通过设置 1 秒空闲时间避免热模型中因电机温度上升而触发过载。电机必须针对该功能进行相关设计。
编辑:jq
-
机器人
+关注
关注
211文章
28445浏览量
207201 -
电机
+关注
关注
142文章
9023浏览量
145551 -
存储区域
+关注
关注
0文章
9浏览量
7163 -
零件检测
+关注
关注
0文章
2浏览量
5512
原文标题:BUFF传送连的使用调试
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
凌科电气工业级RJ45连接器解析!
【RA-Eco-RA2E1-48PIN-V1.0开发板试用】4、UART外接WIFI模块获取天气信息
【AI技术支持】ESP32无线Wi-Fi常用调试API

中国唯一受邀出席2024 IEEE ISPCS企业!赛思ePRTC系统成5G时频同步网最强Buff!






 工商网监
工商网监
评论