 关于4D Radar 天线布局的一些思考
关于4D Radar 天线布局的一些思考
谈谈我对4D Radar 天线布局的思考,对应上一篇(如何做好一款4D 高分辨毫米波雷达)中所述RSP所包含方面的Antenna Array Design (Azimuth/Elevation)(ULA/NLA/MRA) 部分。
我们暂不讨论天线本身的设计与优化,包括天线方向图,极化方式等等。我们更关注于满足4D Radar功能及应用需求下的天线布局设计, 以下讨论是针对自动泊车等应用的短距高分辨4D雷达天线布局设计。而对于中距或者长距雷达及对应的应用在这暂不讨论。
对上述标注句子提取关键字,分别是自动泊车,高分辨,4D,分别对应天线布局设计的技术要求。具体说来,自动泊车应用要求较大FoV,高分辨意味着大天线孔径,4D意味着具备方位及俯仰目标辨别能力。在这几点基础上还要求测角无模糊以及测角鲁棒性高(抗干扰能力强)。总结一下:
FoV(》150度)
Azimuth Resolution(《2度)
Unambiguous Azi & Ele
measurement capability
Robust measurement
High measurement accuracy
上面几点有些是互相矛盾的,提高某一指标的同时可能要牺牲另一个指标,所以设计某一满足条件的天线布局往往是各变量综合博弈与妥协的过程,并且一定要与具体应用,DoA算法结合起来,更要与工艺制造,硬件设计(紧凑设计),生产成本结合起来,所以没有一款能够一招鲜,吃遍天的布局设计,往往没有最好,只有最匹配与最合适。
这篇文章首先从俯仰测角如何影响天线布局给出一些思考,其他影响因素及综合分析会在以后的公众号文章中陆续更新。
一般传统MIMO automotive radar 方位角求解基于波束赋形(3D FFT),那么很自然的联想,如果要加入俯仰分辨能力,能不能也基于波束赋形(4D FFT),带来的结果是所述布局必须是一个面阵,如图1所示是其中一种设计。

图1 面阵设计
图1中上图是原始物理布局,下图是MIMO虚拟阵列布局,对照之前所述指标,这样的布局往往满足你对4D Radar天线的所有想象,但是却不适合车载雷达工程应用,原因可以自己思考。所以从满足方位及俯仰探测角度讲,我们往往寻求图1面阵的低配版。需要指出的是,从系统需求角度,我们对方位角的重视程度要远大于俯仰角,所以对于俯仰测角我们希望采用更具性价比的方式。Bosch GmbH发表的论文给出了如图2 的参考设计。
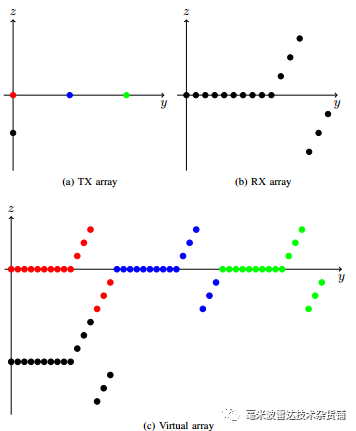
图2 面阵布局“低配版”图2中上图是原始物理布局,下图是MIMO虚拟阵列布局,这种设计往往在俯仰角求解上存在妥协(如4D FFT点数变少等)。但图2 设计用于实际工程也是困难的。特别是天线设计要与商用集成式毫米波雷达芯片收发天线数目及位置匹配。并且目前大多数车载雷达都倾向于采用微带天线,特别是Series Feed Patch Arrays,这给实际布局带来新的挑战。如图3所示,TI公司给出的imaging radar demo板天线布局虽然能实现较好的方位及俯仰测角,但并不能说是好的布局,尤其给后续天线校准带来高要求。而且类似的芯片级联方案目前成本较高。
所以结合现阶段商用集成雷达芯片的“高性价比”方案,俯仰角求解往往Monopulse方式更合适(类似布局如图4所示),再结合MIMO体制更一步提高信噪比。相当于只用一根天线做俯仰角,俯仰面该天线与其他天线错开距离满足FoV内不模糊即可,而且俯仰面往往没有分辨率要求,牺牲的精度可以通过后续算法解决(时间累积/目标分类等)。后续芯片成本或者天线工艺成本降低可进一步通过芯片级联设计改善天线设计,从而提高俯仰测角精度。
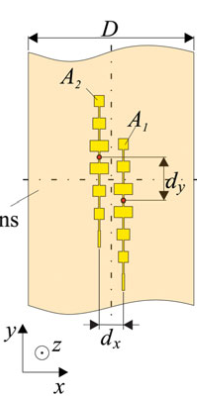
图4 Monopulse布局目前车载雷达俯仰角的测量方式有很多,如图6所示,ADC GmBH的ARS 300系列采用机械扫描方式进行俯仰角测量(个人感觉这类技术较为过时了),如今ARS都出到ARS 600系列(如图7所示)了,并且ARS 600就是4D高分辨雷达,其俯仰测量方式目前未知。Bosch的MRR采用俯仰面天线方向图幅值比来计算俯仰角,感兴趣的可以参考文献[4]。但是对于短距离高分辨4D Radar,基于相位的方式更合适。
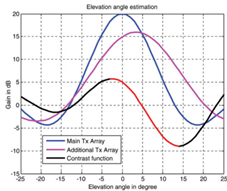
图5 基于方向图的俯仰角测量(Bosch MRR)
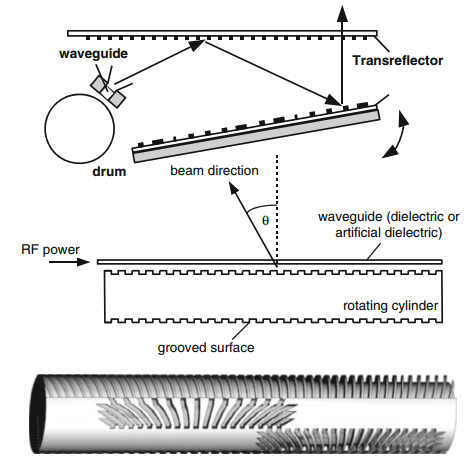
图6 ARS 300(ADC GmBH)图7 ARS 600(ADC GmBH)国外初创公司重点关注Oculii,这货戏太多,有事没事来中国吹牛逼,不过人家刷子还是有两把的,由于它主推4D Radar,我一直在重点关注,其天线布局类似于图8类型,这种布局相当有意思,以后会详谈,不过可以看出,其俯仰角测量是基于4D FFT的,或者采用超分辨算法,实际效果如图9所示。个人感觉成本还是高的,芯片还要定制,所以这就是Oculii与英飞凌合作的原因之一?
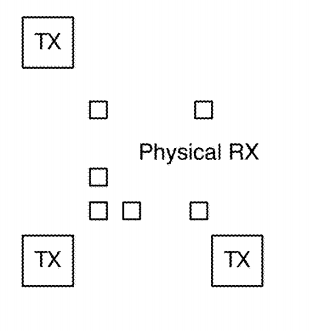
图8 Oculii 布局方案(推测)
来源:毫米波雷达技术杂货铺公众号
原文标题:4D雷达天线布局思考-俯仰角篇
文章出处:【微信公众号:微波射频网】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
天线
+关注
关注
68文章
3205浏览量
140869 -
雷达
+关注
关注
50文章
2940浏览量
117612 -
毫米波
+关注
关注
21文章
1925浏览量
64850
原文标题:4D雷达天线布局思考-俯仰角篇
文章出处:【微信号:mwrfnet,微信公众号:微波射频网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
LITESTAR 4D应用:导入并查看灯具信息
LITESTAR 4D在建筑外墙照明中的应用
LITESTAR 4D应用:运动场照明设计流程
求助,关于TLV320AIC3106滤波器配置有一些疑问求解
Arbe一级供应商Sensrad宣布与天翼交通科技缔结框架合作协议,为其提供4D成像雷达
天线PCB布局的设计考虑因素是什么?
咨询一些关于LED灯具的问题
韩国成像雷达公司bitsensing融资2500万美元 继续开发4D雷达技术
华域汽车电子分公司携手Uhnder开发新一代4D数字成像雷达
行易道(Autoroad)发布了全球领先的4D成像雷达360°环视SLAM系统
经纬恒润4D成像毫米波雷达亮相 CES 2024

4D毫米波成像雷达的测试要求都有哪些嗯?

中央域控雷达:4D雷达新时代






 工商网监
工商网监
评论