 解析OpenVINO™ + SSD 实时对象检测
解析OpenVINO™ + SSD 实时对象检测
前面我们了解OpenVINO 如何部署图像分类网络ResNet,本文我们将会学习OpenVINO 中对象检测网络的部署与推理应用。说到对象检测网络,我们首先需要理解两个概念:对象检测与对象检测网络。
SSD对象检测模型
对象检测是计算机视觉核心任务之一,也是最常见与应用最广泛的视觉场景。OpenVINO 已经提供了以下通用场景下的对象检测包括人脸检测、行人检测、物体检测、车辆检测、车牌检测等,一个图像对象检测显示示意图如下:
图-1(来自SSD论文)
相比图像分类,对象检测多了每个对象位置信息,所以简单的认为对象检测=图像分类+Box位置信息。第一个深度学习相关的对象检测网络正是基于这样思想的RCNN模型,但是它的缺点是无法实时,所以2015年底有人提出了一个实时对象检测网络Single Shot MultiBox Detector缩写为SSD。它的模型结构如下:
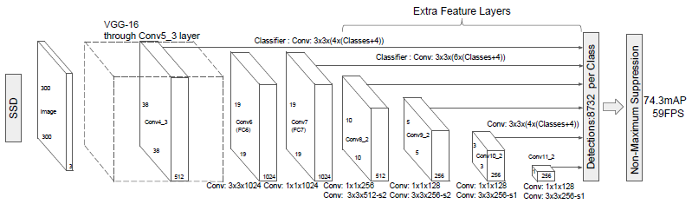
图2(来自SSD论文)
图2中SSD对象检测网络简单说可以分为三个部分:
- 基础网络(backbone) 这里为VGG16
- 特征提取Neck,构建多尺度特征
- 检测头 – 非最大抑制与输出
OpenVINO 中模型库自带预训练的人脸检测网络有很多,分别针对不同的应用场景与输入分辨率。这里我们以face-detection-0202人脸检测模型为例说明,它是一个MobileNetV2作为基础网络的SSD对象检测模型,模型支持的输入图像大小与格式如下:
NCHW=1x3x384x384其中
N表示图像数目,这里为1
C表示输入图像通道数目,这里彩色图像为3
H表示图像高度
W表示图像宽度
期望的图像通道顺序:BGR
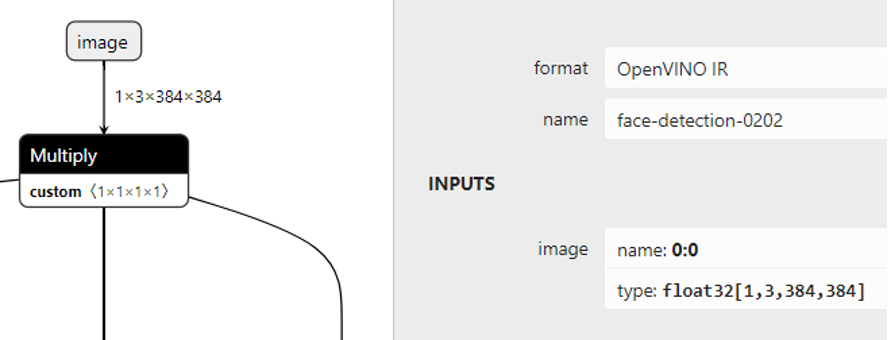
图-3
模型推理计算得输出格式为:
1x1xNx7其中
N表示检测到的对象数目
7表示[image_id, label, conf, x_min, y_min, x_max, y_max]这七个值,其中
Image_id 表示图像编号,这个输入的是一张图像,base为0
Label 表示标签,跟数据集的label_map文本文件相关,根据标签编号可以查找标签文本名
Conf 表示对象的置信度,取值范围在0~1之间,值越大表示置信程度越高
x_min, y_min, x_max, y_max 四个值对象位置信息,分别是左上角与有下角的坐标
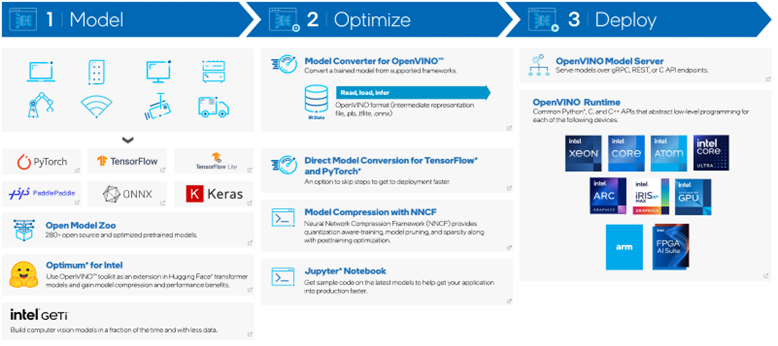
该模型的相关性能参数如下:
图-4
从上面我们可以知道模型来自Pytorch训练生成。
OpenVINO基于SSD模型实时人脸检测
现在我们已经了解SSD模型的基本网络结构,OpenVINO 自带SSD人脸检测模型face-detection-0202的输入与输出相关格式与参数细节信息,这里我们就基于该模型使用OpenVINO 中的推理引擎模型实现一个实时人脸检测应用,根据之前的内容,我们首先需要加载模型,相关代码如下:
// 加载检测模型
auto network = ie.ReadNetwork(model_xml, model_bin);
其中
model_xml表示face-detection-0202模型文件
model_bin表示face-detection-0202权重文件
然后设置模型的输入与输出相关的格式,代码如下:
// 请求网络输入与输出信息
InferenceEngine::InputsDataMap input_info(network.getInputsInfo());
InferenceEngine::OutputsDataMap output_info(network.getOutputsInfo());
// 设置输入格式
for (auto &item : input_info) {
auto input_data = item.second;
input_data->setPrecision(Precision::U8);
input_data->setLayout(Layout::NCHW);
}
printf("get it ");
// 设置输出格式
for (auto &item : output_info) {
auto output_data = item.second;
output_data->setPrecision(Precision::FP32);
}
加载可执行网络,创建推理请求对象实例,代码如下:
// 创建可执行网络对象
auto executable_network = ie.LoadNetwork(network, "CPU");
// 请求推断图
auto infer_request = executable_network.CreateInferRequest();
设置推理输入图像数据,转换为NCHW格式的blob数据,代码如下:
/** Getting input blob **/
auto input = infer_request.GetBlob(input_name);
size_t num_channels = input->getTensorDesc().getDims()[1];
size_t h = input->getTensorDesc().getDims()[2];
size_t w = input->getTensorDesc().getDims()[3];
size_t image_size = h*w;
Mat blob_image;
resize(src, blob_image, Size(w, h));
// NCHW
unsigned char* data = static_cast
for (size_t row = 0; row < h; row++) {
for (size_t col = 0; col < w; col++) {
for (size_t ch = 0; ch < num_channels; ch++) {
data[image_size*ch + row*w + col] = blob_image.at
}
}
}
预测与解析输出结果,代码如下:
// 执行预测
infer_request.Infer();
// 处理输出结果
for (auto &item : output_info) {
auto output_name = item.first;
// 获取输出数据
auto output = infer_request.GetBlob(output_name);
const float* detection = static_cast
const SizeVector outputDims = output->getTensorDesc().getDims();
const int maxProposalCount = outputDims[2];
const int objectSize = outputDims[3];
// 解析输出结果
for (int curProposal = 0; curProposal < maxProposalCount; curProposal++) {
float label = detection[curProposal * objectSize + 1];
float confidence = detection[curProposal * objectSize + 2];
float xmin = detection[curProposal * objectSize + 3] * image_width;
float ymin = detection[curProposal * objectSize + 4] * image_height;
float xmax = detection[curProposal * objectSize + 5] * image_width;
float ymax = detection[curProposal * objectSize + 6] * image_height;
if (confidence > 0.5) {
printf("label id : %d ", static_cast
Rect rect;
rect.x = static_cast
rect.y = static_cast
rect.width = static_cast
rect.height = static_cast
putText(src, "OpenVINO-2021R02", Point(20, 20), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0, 0, 255), 2, 8);
rectangle(src, rect, Scalar(0, 255, 255), 2, 8, 0);
}
std::cout << std::endl;
}
}
imshow("OpenVINO+SSD人脸检测", src);
最终显示结果如下:
图-5
总结
本文我们完成了OpenVINO 人脸检测模型的推理调用演示,关键知识点在于模型的输入与输出格式,以及推理以后的模型输出数据的解析方式。到这里大家希望借助OpenVINO 实现一个视频版本的人脸检测,没关系,下一次我们将来完成这样的事情……
编辑:jq
-
SSD
+关注
关注
21文章
2908浏览量
118311 -
代码
+关注
关注
30文章
4857浏览量
69522 -
人脸检测
+关注
关注
0文章
80浏览量
16615 -
深度学习
+关注
关注
73文章
5527浏览量
121872 -
resnet
+关注
关注
0文章
12浏览量
3228
原文标题:OpenVINO™ + SSD 实时对象检测
文章出处:【微信号:英特尔物联网,微信公众号:英特尔物联网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
将SSD300模型转换为IR时收到错误的原因?
使用OpenVINO™模型的OpenCV进行人脸检测,检测到多张人脸时,伺服电机和步入器电机都发生移动是为什么?
如何部署OpenVINO™工具套件应用程序?
使用OpenVINO™ 2021.4在CPU和MYRIAD上进行自定义对象检测,为什么结果差异巨大?
为什么深度学习中的Frame per Second高于OpenVINO™演示推理脚本?
使用Yolo-v3-TF运行OpenVINO™对象检测Python演示时的结果不准确的原因?
无法在Windows Subsystem for Linux 2上使用对象检测Python演示运行YoloV4模型?
为什么无法检测到OpenVINO™工具套件中的英特尔®集成图形处理单元?
使用OpenVINO™训练扩展对水平文本检测模型进行微调,收到错误信息是怎么回事?
OpenVINO™检测到GPU,但网络无法加载到GPU插件,为什么?
使用OpenVINO C# API部署YOLO-World实现实时开放词汇对象检测
OpenVINO2024 C++推理使用技巧
OpenVINO™ Java API应用RT-DETR做目标检测器实战





 工商网监
工商网监
评论