 基于PTR2030无线收发模块实现多仿生机器鱼通信子系统的应用方案
基于PTR2030无线收发模块实现多仿生机器鱼通信子系统的应用方案
基于全局视觉的多仿生机器鱼系统(Multiple Robotic Fish System,MRFS)一般由机器鱼子系统、视觉子系统、决策与仿真子系统和无线通信子系统四部分组成。其中,无线通信子系统主要负责决策与仿真子系统和机器鱼子系统的信息交互。现阶段,机器鱼子系统和决策与仿真子系统之间多采取单向通信,即决策与仿真子系统形成的控制命令通过计算机串口和无线发射单元发送给机器鱼子系统,而机器鱼子系统则是通过自带的无线接收单元来接收单元来接收上位机的命令,并由机器鱼载AVR单片机对接收到的命令进行处理,从而控制多仿生机器鱼的行为,使其完成某一任务。所以,该通信系统应能利用一台发射器来向多个机器鱼来发送相应的命令。本文根据MRFS实时、准确的实际要求,对通信子系统的硬件设计和通信协议进行了分析描述。
1 多仿生机器鱼通信子系统的硬件设计
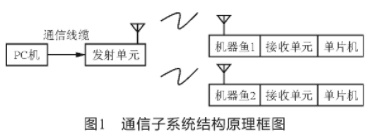
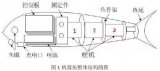
MRFS通信系统由无线发射单元、通信线缆和均线接收单元组成。无线发射单元通过电缆和主机相连,以便将决策子系统的命令以无线广播的方式发送给每个机器鱼自带的接收单元;而无线接收单元则和机器鱼载单片机相连,主要是根据命令来控制机器鱼的行为。该通信子系统的结构框图如图1所示。
1.1 无线发射单元的硬件设计
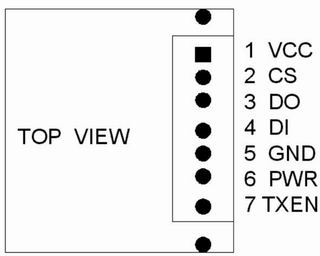
在本文介绍的设计方法中,无线发射单元的核心部件采用了一种新型的超小型、超低功耗、高速无线数传MODEM无线收发模块PTR2030,图2所示是该模块的引脚排列示意图。其引脚功能如下:

VCC:正电源;
CS:频道选择端,该端必须为高(即CS=1),以选择工作频道为315 MHz;
DO:数据输出端;
DI:数据输入端;
GND:电源地;
PWR:节能控制端,当PWR为高电平时,为正常工作状态;PWR为低电平时,为待机微功耗状态;
TXEN:发射接收控制端,当TXEN为1时,模块为发射状态;TXEN为0时,模块为接收状态。
该模块由单IC组合而成,接收发射合一,内置环形天线,体积小,非常适合嵌入式设备;它采用FSK调制方式,工作频率为国际通用的315MHz数传频段,抗干扰能力很强;单向传输速率可达20 KB/s,而且工作电压低(2.7~3.3 V),功耗小,待机状态时的电流仅为8 μA;此外,模块还与CMOS和TTL逻辑兼容,可直接与单片机串口相连,编程非常方便。
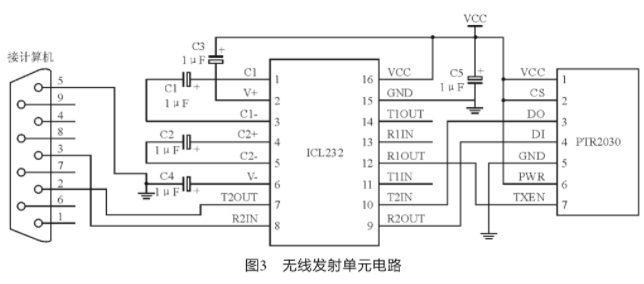
由于决策子系统生成的控制命令是由主机通过常用的RS-232串行接口发出的,而PTR2030可以接收的是TTL/CMOS电平,因此,该接口电路需要进行电平转换。本设计采用Intersil公司生产的电平转换芯片ICL232来完成该转换。ICL232芯片包含两路驱动器和接收器,可以完全满足系统的要求。PTR2030的PWR端接高电平可使其处于工作状态;TXEN端可通过ICL232由上位机编程控制;DI端和DO端则通过ICL232和上位机的RXD和TXD相联。ICL232将RS-232电平转化为TTL电平后,可通过讽制发射模块PTR2030以无线电波的形式发射出去。无线发射单元的原理图如图3所示。
1.2 无线接收单元的硬件设计
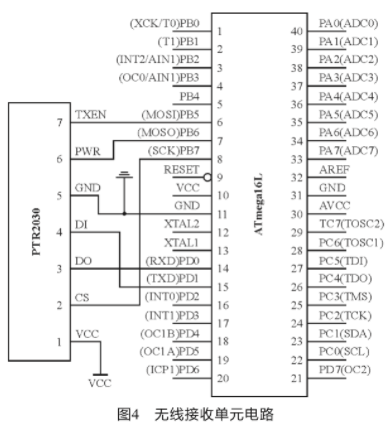
决策子系统的控制命令由无线发射单元以无线电波方式发送后,经无线接收单元解调为单片机可识别的信号并送到机器鱼载单片机进行处理,以实现对各机器鱼的控制。由于单片机系统可以直接接收TTL/CMOS电平,所以,PTR2030和单片机之间不需要进行电平转化,可以直接连接。这样,PTR2030无线MODEM的DI端应接单片机串口的发送端,DO端应接单片机串口的接收端。利用单片机的I/O端口可以对模块的发射、频道转换和低功耗模式进行控制。在MRFS系统中,机器鱼载单片机采用ATMEL公司推出的新型AVR单片机ATmega16L。该芯片具有先进的RISC架构,其数据吞吐率高达1 MIPS/MHz,故能较好的处理系统在功耗和处理速度之间的矛盾,非常适用于机器鱼或机器人这样实时性和可靠性要求较高的智能系统。该无线接收单元原理图如图4所示。
2 通信协议的设计
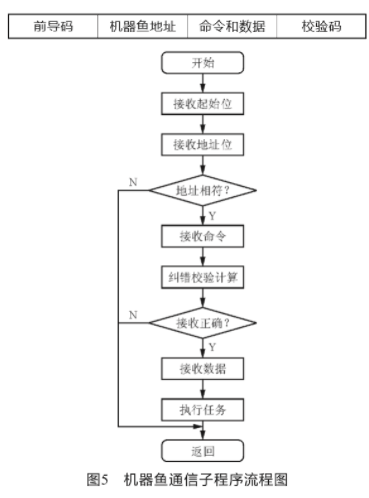
在MRFS中,一台PC机(上位机)通常需要对应多个机器鱼(下位机),因此,该系统属于主从式数据传输系统。本设计采用单工通信方式(即决策系统的命令由PC机发送给各个机器鱼载单片机),机器鱼的运动信息通常是由视觉子系统提供给PC机,而机器鱼本身不向PC机发送命令。单工通信系统的协调完全由发送端控制,发送端采用带地址码的数据帧发送数据或命令,然后由各机器鱼全部接收,并将接收的地址码与自己的地址码进行比较,地址码不同则忽略数据(不做任何响应);地址码相同,则证明某个机器鱼已被PC机寻址,该机器鱼则根据发送的数据或命令进行不同的响应。这种传输方式可保证在任何一个瞬间,只有一个机器鱼被寻址,从而避免了相互干扰。图5所示是某个机器鱼通信子程序的流程图。由于本系统采用的是无线数据传输方式,因而数据必须进行规定格式的处理,其数据包的格式如下:
3 纠错编码的设计
在无线通信系统中,尽管硬件电路中已引入了一些抗干扰措施,但数据在传输过程中,不可避免地还会受到各种干扰,从而使通信接收端收到的数据与发送端实际发出的数据出现不一致的现象。因此,为了保证系统的可靠性,设计时必须在通信系统中加入差错控制编码(纠错编码)措施。常用的纠错控制方式主要有三种:检错重发(ARQ)、前向纠错(FEC)和混合纠错(HEC)。本系统是单工通信方式,适合采用既有检错功能又有纠错功能的BCH (7,4)前向纠错分组码控制,因而需要使用两字节的长度来发送一字节的有效信息。事实证明,该纠错方式无论在多机器鱼系统还是在足球机器人系统都取得了较好的效果。
4 结束语
本文介绍了多仿生机器鱼通信子系统的接收和发射单元的硬件设计和通信协议。讨论了机器鱼通信子系统的软件运行程序和通信中的纠错编码设计方法。该方法可极大的提高MRFS的可靠性,从而为拓展MRFS功能提供了一个可靠的平台。
责任编辑:gt
-
天线
+关注
关注
68文章
3178浏览量
140698 -
无线
+关注
关注
31文章
5427浏览量
173052 -
计算机
+关注
关注
19文章
7409浏览量
87691
发布评论请先 登录
相关推荐
【OK210申请】仿生机器鱼与水产海洋生物生态系统建模、分析与调节
四足仿生机器人
开源资料六足仿生机器人(原理图+PCB+源码等)
无线收发数传MODEM模块PTR2030及其应用
基于无线收发数传模块PTR2030的温度测控系统设计
仿生机器鱼_斌小狼的毕业设计
基于PIC单片机的仿生机器鱼的舵机控制

基于PIC单片机的仿生机器鱼的舵机控制

蝠鲼仿生柔软机器鱼





 工商网监
工商网监
评论