 机器人无刷减速电机质量把控的详细说明
机器人无刷减速电机质量把控的详细说明
工艺重要点:转子寿命增长。
减小转子机械不平衡产生的噪声转子的不平衡量应尽可能减到最小,否则平衡精度就低。平衡精度与电机的规格、性质和使用条件有关。例:在永磁电机运行时间长,振动和噪声要小,平衡精度要求较高。转子铁芯的直径与长度之比越大,离心力越大,平衡精度要高。
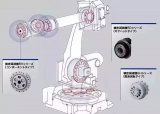
管道机器人无刷减速电机齿轮间隙
齿轮间隙越低,配合精度越高,为了高精度配合,东弘自主生产滚齿设备。保证整体环节的高精度。
轴承工艺: 注意轴承的选择 。电机轴承在运转过程当中,轴承的振动程度会随轴承内径的增加而增大,每增加5 mm的直径,振动约增大1— 2 dB 。
管道机器人(用无刷减速电机)以运动机构作为载体,需要稳定六驱系统,内部热处理齿轮,效率稳定可靠这款用的无刷减速电机的参数如下:
(1)直流无刷电机,其主要参数:额定功率750W,额定电压DC24V,额定转速3000rpm,空载转速3600rpm,额定转矩2.39N.m,堵转转矩7.16N.m,额定电流39.06A,空载电流<9.2A,绝缘等级F级,防护等级IP54,法兰尺寸80×80mm。
(2)无刷减速电机,其主要参数:单级减速,减速比:3,额定输入转速3000rpm,MAX输入转速6000rpm,精密背隙≤8arcmin,扭转刚性:>7.5N.m/arcmin,额定输出转矩6N.m,MAX输出力矩12N.m,防护等级IP65,接入端与直流无刷电机配套,输出端方法兰为80×80mm,输出轴径为20h7mm
fqj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28762浏览量
208971 -
减速电机
+关注
关注
1文章
295浏览量
10302
发布评论请先 登录
相关推荐
减速电机概述了解多少?
大型机械设备等,就需要使用减速电机来增大扭矩,确保设备正常运行。
能量转换 :减速电机可以将电能转化为机械能,从而驱动机械设备运转。在各种需要将电能转化为机械能的场合,如工业自动化、
发表于 12-23 15:16

FOC电机在机器人技术中的作用
随着工业自动化和智能制造的快速发展,机器人技术已成为现代工业的重要组成部分。电机作为机器人的动力源,其性能直接影响到机器人的工作效率和稳定性。FOC
减速电机该如何分类?
减速电机是一种将电能转换为机械能的设备,通过内置的减速机构来降低电机的转速,同时增加扭矩。这种设备广泛应用于各种工业自动化、输送系统、机器人
人形机器人带动无框力矩电机需求,厂商积极布局
正处于‘井喷前夜’。”统计数据显示,到2030年,全球人形机器人市场规模将达到1000亿美元,中国人形机器人市场规模将达到300亿美元。 人形机器人的爆火让作为核心部件的控制电机跟
应用于人形手机器人超小型HarmonicDrive哈默纳科减速机
人形手机器人需高精度和灵活性,HarmonicDrive哈默纳科CSFsupermini减速机提供关键支持,超小型设计节省空间,无背隙、高定位、高旋转精度,助力机器人完美完成任务,提供


机器人应用选型推荐::HR8870直流有刷电机驱动芯片
模式
过温关断电路
短路保护
欠压锁定保护
自动故障恢复
HR8870芯片应用领域
打印机及办公设备
电器
机器人
工业设备
下面跟大家分享当用PWM控制电机转速时,在不同驱动和衰减模式下的电流通路图
发表于 07-08 15:56
Al大模型机器人
和迭代来不断改进自身性能。它们可以从用户交互中学习并根据反馈进行调整,以提高对话质量和准确性。可定制性与整合性: AI大模型机器人可以根据特定需求进行定制和整合,以满足不同场景和应用的要求。它们可以与其
发表于 07-05 08:52
步进电机在工业机器人中的应用
类型,在工业机器人中发挥着至关重要的作用。本文将从步进电机的定义、特点出发,详细探讨其在工业机器人中的应用,并结合相关案例进行分析,以期为工业机器人
永磁无刷直流电机的控制方法
永磁无刷直流电机(BLDCM)因其高效率、高功率密度、低维护成本等优点,在电动汽车、航空航天、工业自动化等领域得到了广泛应用。为了充分发挥永磁无刷
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
了使用体验,其发展前景愈发广阔。
1. 搭配无刷电机的扫地机器人之优势
无刷电机相较于传统有刷电机,具有更高的效率、更低的噪音和更长的使用
发表于 05-05 15:03
工业机器人核心部件之精密减速机
关节是工业机器人最重要的基础部件之一,也是运动的核心部件:精密减速机。这是一种精密的动力传达机构,其利用齿轮的速度转换器,将电机的回转数减速到所要的回转数,并得到较大转矩的装置,从而降
发表于 04-19 11:33
•571次阅读





 工商网监
工商网监
评论