 使用过程仿真函数模拟PID控制的过程
使用过程仿真函数模拟PID控制的过程
练习目的:使用过程仿真函数模拟PID控制的过程,熟悉PID函数的使用和调试。
练习要求:通过对一个过程的控制,实现预整定和精细整定并得到PID参数。
1) 在CPU1511中创建一个循环中断并设定循环时间为200ms。例如OB31
2) 在OB31中调用PID函数PID_compact,然后在全局库中打开库文件《Sim_controllprocess_V13_SP1》,并调用过程仿真函数Sim_PT3,连接PID控制函数与仿真函数的管脚。
3) 在“工艺对象”标签中选择对应的工艺对象(PID控制函数的背景数据块),在“组态”栏中设置PID参数,这里只设置PID的输入和输出,其它参数保持缺省设置。最后下载程序和参数配置。
4) 在“调试”界面中进行参数自整定,可以选择“预调节”方式,整定完成之后如果整定效果满足工艺要求,可以上传PID参数到项目中。
5) 如果输出震荡,可以再次选择精细调节模式进行整定。精细整定将在输出上产生激励,经过计算后再平滑输出。
文章出处:【微信公众号:PLC技术圈】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
plc
+关注
关注
5021文章
13427浏览量
466897 -
西门子
+关注
关注
97文章
3082浏览量
116788 -
PID
+关注
关注
36文章
1475浏览量
86141
原文标题:西门子S7-1500PLC实现PID控制方法
文章出处:【微信号:xue_PLC,微信公众号:PLC技术圈】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
PID控制详解(可下载)
一、PID控制简介 PID( Proportional Integral Derivative)控制是最早发展起来的控制策略之一,由于
发表于 02-27 15:42
•0次下载
量水堰计在使用过程中常见问题剖析
量水堰计作为一种测量流量的常用设备,广泛应用于水利工程、环境监测等领域。然而,在使用过程中,量水堰计常常会遇到一些故障,如堰体堵塞、水位测量误差、水流波动大等问题。下面是南京峟思给大家做出的具体介绍
量水堰计在使用过程中会遇到哪些常见的故障?
量水堰计作为一种常用的水位测量仪器,在水文监测、水资源管理等领域发挥着重要作用。然而,在实际使用过程中,由于各种因素的影响,量水堰计可能会出现一些故障,影响其正常运行和测量精度。南京峟思将给大家介绍

求助,关于ADS1298R使用过程中遇到的疑问求解
我们ADS1298R 这颗物料在使用过程中,经常出现以下问题
1 导联脱落判断不了
2心电导联线连着心电模拟器,确判段为导联脱落状态
3呼吸信号出不来
请教一下,这个芯片 判断导联线脱落的机制是啥,是通过电阻或者电流?
发表于 11-28 08:26
PID控制中的反馈机制解析
在现代工业自动化和过程控制中,PID控制器是最为常见和有效的控制策略之一。它通过比例(P)、积分(I)和微分(D)三个基本控制作用的组合,实
如何选择合适的PID控制器
,以实现精确的过程控制。选择合适的PID控制器不仅能够提高系统的稳定性和响应速度,还能减少能耗和提高生产效率。 1. 理解PID控制器的基本
在焊接中应用PID控制技术
1. 引言 焊接是连接金属部件的重要方法,广泛应用于建筑、汽车、航空航天等行业。焊接质量的高低直接关系到产品的结构强度和耐久性。PID控制技术通过实时调整控制量,能够有效地控制焊接
PID控制的优缺点分析 PID参数调节的常见方法
控制算法结构简单,易于理解和实现,不需要复杂的数学模型。 适应性强 :PID控制器能够适应多种类型的系统,具有较好的鲁棒性。 调节方便 :通过调整比例、积分、微分三个参数,可以灵活地调整控制
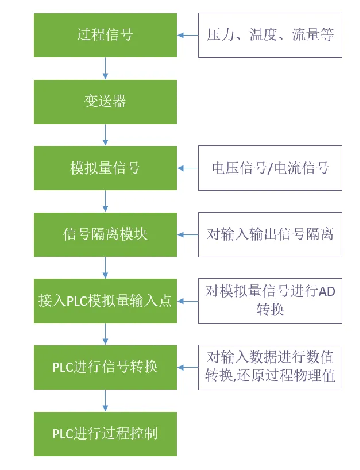
PLC对模拟量信号的处理过程及方法 详解版
模拟量信号是自动化过程控制系统中最基本的过程信号(压力、温度、流量等)输入形式。系统中的过程信号通过变送器,将这些检测信号转换为统一的电压、电流信号,并将这些信号实时的传送至
自动控制原理及过程控制方法
自动控制原理及过程控制方法是工程领域中非常重要的一部分,广泛应用于工业生产、航空航天、交通运输、医疗设备等多个领域。本文将详细介绍自动控制原理的基本概念、控制系统的分类、
WXZ196微机消谐装置使用过程介绍
WXZ196微机消谐装置使用过程介绍 一、概述 微机消谐装置是一种用于消除电力系统谐波的设备,广泛应用于电力、冶金、化工等行业。该装置主要基于微处理器技术,通过实时监测和调整系统参数,实现对谐波
工业过程控制可配置模拟前端ADC SC1641,可替代SC7793
工业过程控制系统应用多种多样,范围覆盖从简单的流量控制到复杂的电网,从环境控制系统到炼油厂过程控制。可编程逻辑控制器和分布式





 工商网监
工商网监
评论