 剖析华为和博世L4级代客泊车系统
剖析华为和博世L4级代客泊车系统
博世与奔驰在2018年推出第一代全自动代客泊车AVP系统,以场端为核心,第一代AVP系统在地面上部署了几十个激光雷达,不仅成本高且施工与部署也不太方便。2020年中期,第二代AVP系统用立体双目取代激光雷达,博世也在欧洲汽车电子杂志ATZ上发表文章Safety and Security Concept for an Automated Parking Service,强调新系统的安全性比激光雷达进一步提高,不过要花35欧元才能浏览文章,https://link.springer.com/article/10.1007/s38311-020-0327-5。同时博世、福特与底特律地产开发商Bedrock合作,在Bedrock开发的项目中部署其AVP系统。
无独有偶,华为于2020年底也申请了以立体双目为核心的AVP专利,申请公布日是2021年的3月30日。华为也是以场端为核心,基本不在车端做改动。
博世在斯图加特机场的P6停车场部署了180个立体双目摄像头,同时搭建了一套服务器系统,最终达到L4级的AVP。
上图为斯图加特机场平面图,斯图加特是德国第六大城市兼全国第四大城市联合体(仅次于鲁尔区、莱茵-美因区和柏林)。博世、奔驰和保时捷的总部都在斯图加特。P6停车场尺寸未知,不过P14(公交停车场)的尺寸是确定的,那就是210米长,37米宽,推测P6停车场大约70米长,20米宽。
博世和奔驰合作提供AVP服务,全程无人操作,包括付款。除了博世和奔驰外,还有一个重要合作伙伴就是Apcoa Parking,这是欧洲最大的停车场运营企业,在13个国家9500个地点拥有150万个停车位。Apcoa计划将20%的停车位改造成AVP停车场。
福特、博世和Bedrock在底特律的Corktown打造了一座类似斯图加特P6的AVP停车场,不过规模要大不少。
这是一座拥有450个车位,建筑面积15000平方米的立体车库,实际除了这三家,还有一个合作伙伴Rich & Associates,停车库的设计者。
具备WiFi的车辆到达AVP停车场门口时,车辆与停车场服务器经手机确认连接,然后停车场服务器根据提前存储的停车场地图以及立体双目摄像头传递的车位信息为车辆规划好停车路径,服务器接管车辆按规划好的停车路径行进,如果探测到4米前有障碍物或行人就会自动刹停,服务器发送到车辆的路径规划命令刷新频率大约5Hz。实际可以看做立体双目摄像头将整个停车场做了一个实时动态的3D数学模型,停车场服务器根据数学模型计算出可通行路径与路径规划,而L4车辆是把服务器放在车上而已。
停车服务器有两个,互相校验备份,保证高可靠性。
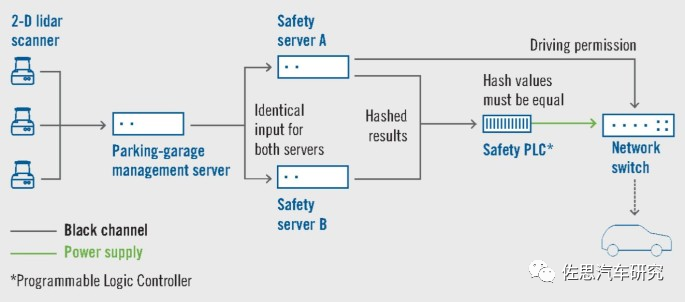
图片来源:博世
上图中的2D激光雷达已经换成立体双目。
博世天花顶立体双目摄像头特写。据说停车场的空间使用率提高了20%。
这种设计需要架设停车场服务器,服务器的初始化技术含量比较高,成本也高。中国企业的做法一般是停车场服务器不搞那么复杂,停车场服务器提供车位信息,将车位信息发送到用户手机,让用户选择车位,可以提前预约车位,按华为的设想,车位预约后,地锁自动升起。
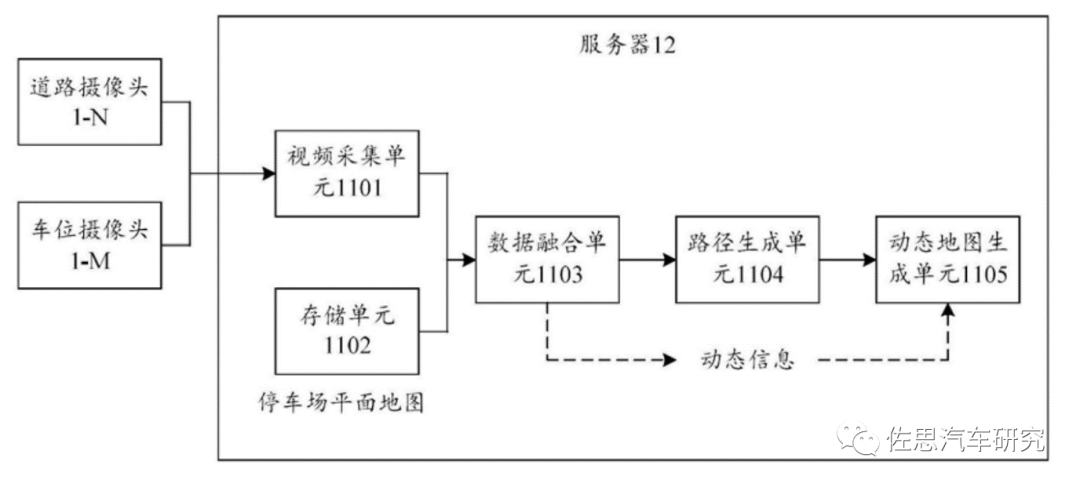
图片来源:华为
华为的AVP自动泊车系统如上图,华为的道路摄像头是双目,车位摄像头可能是单目,只需要知道车位是否被占用就行。
为什么华为和博世还有大众和福特要用双目做AVP系统传感器的核心,而不像特斯拉那样用单目或三目。因为三点:一是立体双目系统不需要识别就可探测障碍物信息;二是立体双目能够提供高可靠性的3D空间信息;三是立体双目U-V视差能够识别路面凸起变化。简单来说就是立体双目安全系数远高于三目和单目。
以特斯拉为代表的单目和三目系统,对深度学习高度依赖,深度学习视觉感知中目标分类与探测是一体的,无法分割。也就是说,如果无法将目标分类(也可以通俗地说是识别)就无法探测。换句话说,如果无法识别目标就认为目标不存在。车辆会认为前方无障碍物,会不减速直接撞上去。
训练数据集无法完全覆盖真实世界的全部目标,能覆盖10%都已经是很神奇的了,更何况现实世界时时刻刻都会出现新的不规则目标。特斯拉多次事故都是如此,比如在中国两次在高速公路上追尾扫地车(第一次致人死亡),在美国多次追尾消防车。还有无法识别车辆侧面(大部分数据集都只采集车辆尾部图像而没有车辆侧面图像)以及无法识别比较小的目标。毫米波雷达可能误判,特别是静止目标,如金属井盖、金属天桥、金属护栏,因此毫米波雷达会自动过滤掉静止目标。此时需要双目或激光雷达,这两类传感器都无需分类即可探测。
立体双目的深度信息是通过三角测量法获得的,在有效距离内,精度可达厘米级,误差低于5%。当然,激光雷达在某些情况下会比立体双目更好。单目也可以提供推测的深度信息,单目获取深度信息有两种:一种很简单,深度学习训练,深度学习几乎是万能的,什么地方都能用,但是深度学习是黑盒子,又可以叫调参的艺术,可靠度和准确度很低,精度不会超过亚米级,误差可能有50%,目前只在研究论文里出现;第二种是SfM(Structure from Motion),需要至少2个摄像头,运算量很大,可靠度和准确度比深度学习高很多,但跟立体双目比还是差距很大,典型代表就是Mobileye用在吉利上的SuperVision。
Mobileye有关SfM的专利主要有三个,一个是2014年的Dense Structure from motion,另一个是2017年的Stereo Auto-Calibration From Structure-from-motion,还有一个是2020年的Comfort Responsibility Sensitivity Safety Model(长达197页),其中虽未提及SfM具体算法,但描述了SfM Stereo Image的处理流程。最终Mobileye还是倒向激光雷达,如果FMCW激光雷达开发成功,SfM显得性价比很低。
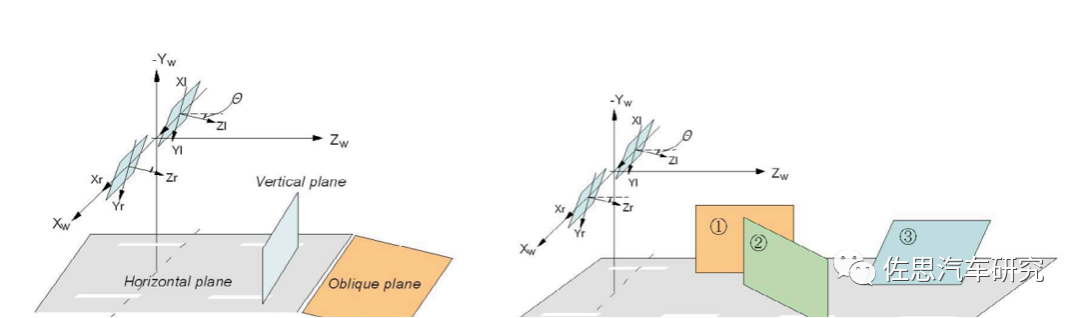
地下停车场通常都是有坡度的,单目和三目是无法识别路面的,特别是有坡度的路面更是完全无法检测,因为它是纯2D平面的传感器,但立体双目可以很轻松实现。奔驰的魔毯系统就是用立体双目检测道路起伏,提前让悬挂系统做出调整,也是唯一真正的自适应悬挂。
双目除了常用的视差图还有一个U-V视差。它是在原始视差图上延伸出来的。
上图为典型的U-V视差图。U-V视差图可以判断路面以及建筑物,准确度远高于深度学习的方法。
图片来源:博世
U-V视差也是自动驾驶可行驶空间的关键,是导出路面的关键。
博世和华为的系统对车辆要求都不高,包括线控制动,电动助力转向大部分车辆都配备,只有EPB (电子驻车系统),国产车普及率不高,实际就是一套小功率的轮毂内电磁制动系统。国产车有些是电子手刹,只是用电机代替了手扳。
华为依仗庞大的手机族群,又在基础设施领域耕耘多年,IoT方面具备绝对优势,在AVP方面优势很大,博世则在与车企合作方面优势非常明显。不过在中国,开发商或停车场业主才是有决定权的一方。
编辑:jq
-
华为
+关注
关注
216文章
34437浏览量
251740 -
服务器
+关注
关注
12文章
9160浏览量
85421 -
激光雷达
+关注
关注
968文章
3972浏览量
189923 -
深度学习
+关注
关注
73文章
5503浏览量
121162
原文标题:华为和博世L4级代客泊车系统剖析:立体双目为核心
文章出处:【微信号:zuosiqiche,微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
伊予铁巴士公司启动L4级自动驾驶公交商业运营
当春节驾车返乡拥有了L3/L4级自动驾驶
l4级别自动驾驶的特点是什么
经纬恒润全冗余R-EPS助力L4级自动驾驶落地

L4算法公司如何助力城市NOA加速落地?
Mobileye引领自动驾驶新纪元:L4级无人驾驶系统在德国成功路测
百度发布全球首个L4级自动驾驶大模型
百度发布全球首个L4级自动驾驶大模型Apollo ADFM
L0与L4双机采用SPI DMA循环模式通信过程中,L4接收数据错位了的原因?
华为提出业界首个L4级AI安全智能体,迈入智能防御新时代
华为Net Master+高清网络数字地图,加速迈向L4自智网络
NVIDIA和昊铂宣布双方将合作量产L4级自动驾驶汽车






 工商网监
工商网监
评论