 布谷鸟同创:当前自动驾驶市场有三类需求在快速增长
布谷鸟同创:当前自动驾驶市场有三类需求在快速增长
近日,佐思汽研对布谷鸟同创科技副总裁晋建峰做了专访:
Q1
请您简单介绍一下AutoWheel的定位和技术优势?
晋建峰:Autowheel是布谷鸟科技子品牌,聚焦智能驾驶和车路协同业务。作为国内最早从事域控制器产品开发的技术企业,不仅具有高算力、高安全车规产品研发经验,同时具备自主知识产权的全栈智能驾驶算法技术能力和整车的系统集成能力。
Q2
AutoWheel怎么看APA、AVP的发展趋势?
晋建峰:RPA,HPP到最终的AVP是可以给客户带来明显好处的功能,目前主要在单车智能和车路协同两条技术路线上持续发展,最终还是要看谁的成本更低,成熟度更高才具备大规模推广的可能。
Q3
您过去的演讲中,认为国内企业与国外Tier公司在智能泊车技术上基本处于同一起跑线。这个判断的依据是什么?
晋建峰:智能泊车功能在起步的时候,国外tier1厂家只有成熟的基于纯超声波雷达的泊车产品,体验感不好,还会经常剐蹭。对于基于视觉和雷达融合的自动泊车产品来说,大家是同一时间发力。由于泊车功能本身是低速场景,对安全的要求不像ADAS要求的那样高,进入的门槛也相对低一些,这给了国内的公司很好的赶超机会。目前我们看到国内厂商在这方面已经走到了国外tier1的前面,甚至有国外tier1找国内算法公司为其研发泊车算法的案例。
Q4
AutoWheel的主要产品是域控制器吗?主要支持哪些自动驾驶芯片和操作系统?
晋建峰:AutoWheel的主要产品包括车端的ADAS/AD域控制器,也包括VBOX,地图盒子以及EDR等产品;路端的MEC边缘计算单元。当前主流的NVIDIA,NXP,Renesas,TI等芯片均支持,支持的操作系统包括Linux、QNX、Autosar以及自研的BIOS等。
Q5
我们注意到AutoWheel在车路协同领域也有布局。车路协同的主要需求来自于哪里?
晋建峰:车路协同领域主要聚焦在道路感知系统以及车端的融合型VBOX。
Q6
AutoWheel下设人工智能研究院(天津东丽)、边缘计算研发中心(深圳南山)和计算机视觉研发中心(沈阳浑南)三大研发中心。各自的分工是什么?
晋建峰:Autowheel人工智能研究院主要从事智能驾驶相关算法,应用软件以及V2X协议栈开发与测试;边缘计算研发中心主要从事各类边缘计算平台的软硬件开发与测试;计算机视觉中心主要从事计算机视觉算法研究及相关软件,中间件开发。
Q7
AutoWheel认为L2.5需要多强的算力才够?什么样的传感器配置才比较合适?
晋建峰:L2.5本身就不是一个标准性的定义,各家的理解也不尽相同。表现比较好的是那种以视觉和激光雷达作为主要感知手段的方案,至少也要几十个TOPS的算力满足算法的需求;但是如果对于主要使用1V5R方案的系统来说,也可以实现类似的功能,但是算力要求就小的多了,有几个TOPS的算力用于前向视觉智能感知目的就好了,一个高功能安全等级的MCU就可以满足其余的运算要求。所以这个问题本身是个开发性的话题,没有什么标准答案。
Q8
您怎么看今年的自动驾驶市场?客户需求主要来自于哪里(泊车,L2.5, L3或其他)?
晋建峰:当前的自动驾驶市场有三类需求在快速增长:第一、应用于乘用车的导航自动驾驶功能,实现的是高阶自动驾驶功能,但是需要驾驶员在环,依然算在L2辅助驾驶级别;第二、应用在乘用车的记忆泊车和代客泊车功能,属于一种低速状态下的自动驾驶功能;第三、应用于特种场景的无人车,如无人物流车,无人叉车,无人清扫车,无人巡逻车等。
Q9
AutoWheel客户和合作伙伴分别有哪些?未来发展规划如何?
晋建峰:AutoWheel的客户既有OEM也有Tier1,既有自动驾驶算法公司,也有系统集成商。AutoWheel的合作伙伴主要是芯片、算法公司以及系统集成商,也有部分科研院所。
未来的发展主要是以To B业务模式,基于人工智能和边缘计算技术,交付更多有市场竞争力的产品,服务更多的客户。
Q10
在AVP标准组组织的中关村AVP示范项目中,贵司主要承担哪部分工作?
晋建峰:我司主要承担车端系统的研发与验证工作,包括域控制器、传感器在内的整个代客泊车车端系统。
全文
布谷鸟同创5月8日智能泊车论坛演讲
演讲稿阅读大约需要3-5分钟
各位同仁,各位嘉宾,下午好!
我是来自布谷鸟同创的晋建峰,主要负责公司智能驾驶和车路协同业务,今天主要针对泊车场景的方案及发展路线跟大家做个交流分享。
开始之前我想先拿这样一幅图作为演讲的开场白。
在刚刚结束的上海车展上,各位同仁应该已经看到了很多新的技术以及商业应用上的创新。拿世界经济论坛主席一句话作为开场:大鱼吃小鱼的时代已经落幕,我们已经进入了快鱼吃慢鱼的时代。结合AVP技术目前的发展,完全可以验证这句话。
举一个例子,现在路面上在跑的很多量产车,还在使用半自主泊车技术,基于超声波雷达感知,驾驶过程中自动控制方向盘转向,驾驶员自己踩刹车,这类车型仍在生产和使用,但是这种技术已经很落后了。
自动驾驶技术的发展非常迅速,也落地了很多实际应用。简单的梳理一下智能驾驶发展过程,与大家共同探讨和思考:面向未来,如何在市场上赢得竞争?
智能驾驶可以分成两大类场景:第一类是面向开放道路出行,比如行驶在快速路或高速路的出行场景;第二类是基于封闭的场景低速控车,如港口自动驾驶,停车场泊车场景。
在第一类场景中,基于高速出行的L2级别的ACC、AEB系统,功能已经比较成熟。L2.5级别的导航自动驾驶功能,已经在高速路、城市快速路运营,下一步往城市道路上快速发展。
第二类场景中,在APA的基础上,发展出RPA遥控泊车、记忆泊车,这些技术已经在快速的推向市场。带12个超声波雷达和4个环视摄像头的自动泊车系统,有很多量产车型已经发布,车辆普及率在快速增长。
最终这些技术都会走向一个融合,不管是在高速路还是在快速路,或者在停车场环境内,最终向实现高级别的自动驾驶方向发展 。
泊车系统功能发展
在以上背景下,再来讨论泊车。最早出现的泊车系统是基于纯超声波雷达半自动泊车的功能,以沃尔沃S90为代表,当时对该车型做对标测试的时候,发生过不少的刮蹭案例。
中早期的车辆控制都是半自动的,只能控制转向,之后发展到可以做完整控制转向、制动、手刹等的纯自动泊车APA。
发展到现在,比较主流的是超声波雷达和环视摄像头进行融合的系统,这是市面上比较主流的量产方案。和最早期系统比较,已经在很多方面给用户带来便利,比如,支持自动泊车的车位类型,包括泊车成功率上,已经有了大大提升。
现在的遥控泊车和记忆泊车,都是在市场需求推动下逐步发展的。大家都在做技术上的尝试和准备,为了最终能够实现一键泊入和一键泊出的AVP功能。
泊车功能关键技术发展
刚才简单回顾了一下泊车系统功能的发展路线,下面讲讲功能背后涉及的关键技术,可以分为以下几个方面:
01
环境感知能力
最早的纯超声波雷达感知,面临很多问题,因此很快发展为基于视觉(环视摄像头)做车位识别和障碍物识别,甚至可以进行融合。发展到今天,已经有4D成像技术的毫米波雷达,传感器的能力在逐步的提升,这都是泊车功能所需要的。车辆四周的综合感知能力,是自动泊车功能好坏的基础。
02
车辆控制模式
现在已经发展的非常好了,早期像燃油车会涉及到不同的车型,不同的关联件,不同的执行器控制起来非常复杂,需要解决一系列的问题。现在整车控制基本上可以通过中央计算单元,完全控制车联的转向、制动等功能。
03
人机交互方式
从司机在车上操作,到司机从车上下来,在距离不远处遥控泊车,在有些车位比较窄的情况下,防止司机下不了车。很快这种自动泊车动能可以用手机通过远程的方式操作,这样的人机交互方式会越来越靠近远程控制。
04
计算机控制平台
所有的功能都需要在控制器上运行,这样一个计算控制平台从早期算力比较低的MCU方案,到现在算力强大的控制器方案。首先需要有大量的多传感器接入能力,比如超声波,摄像头、雷达等,需要包括对图像的接入和处理、对毫米波雷达甚至激光雷达数据的处理。同样会有功能安全和信息安全的考虑,当真的可以实现场端和车端协同控制时,如何抵御互联网黑客攻击,保护信息安全,还有很多的问题需要解决和探讨。
针对车端介绍几个典型的系统方案。
系统方案1-超声波雷达
基于纯超声波雷达的自动泊车功能,拥有12个超声波雷达的配置,实现SPA的功能,是早期的低成本方案。
系统方案2-超声波雷达融合环视
针对单超声波雷达的不足,融合四个环视摄像头的感知方案,实现的APA功能是当前量产的主流方案,可以支持的泊车类型和应用场景在不断发展中。
系统方案3-融合1V5R
从传统ADAS演进的路线,在四个环视摄像头加上十二个超声波雷达方案的基础上,现在称为L2.5或者L2.9,这样的高级别辅助驾驶系统方案,一般都会有一个域控制器。这个方案也会融合做一些ADAS功能。除了用环视摄像头和超声波雷达对周边感知之外,加上前向摄像头或者毫米波雷达对前方感知的能力,在这样的基础上可以实现长距离的记忆泊车,可以在过程中实现避障,这种系统方案属于比较典型的L2.N的ADAS解决方案。
系统方案4-自动驾驶集成
我个人认为这种方案比较适应未来的方向。整个车身会引入更多摄像头,前向、侧向和后端都会有足够的摄像头,在中央高算力计算平台的支持下,有比较高的自主学习能力,加上对多传感器的感知、融合和处理能力,去实现高级别的代客泊车功能。
以上把泊车从最早的半自动泊车到AVP,从系统功能到技术方案做了一个简单的梳理。
下面我主要给大家介绍一下布谷鸟同创科技,公司主要的技术和产品是什么?
布谷鸟同创科技(天津)有限公司成立于2019年,以AutoWheel为品牌,聚焦智能驾驶及车路协同业务,下设人工智能研究院(天津·东丽)、边缘计算研发中心(深圳·南山)和计算机视觉研发中心(沈阳·浑南)三大研发中心,具备智能驾驶及车路协同系统的研发、测试验证和交付能力,为客户提供最具市场竞争力的系统解决方案及产品。其中生产制造部分,计算平台和传感设备制造分别由关联的深圳光明工厂和安徽宿松工厂负责。
AutoWheel目前已形成计算平台、操作系统、智能算法及传感设备的全系统研发能力和测试验证能力,具备提供ADAS辅助驾驶系统、AD自动驾驶系统全栈系统解决方案及产品配套服务能力。支持按车系平台化研发、按车型个性化配置,满足客户个性化方案定制,支持汽车全生命周期软件与数据服务,提高整车性价比。
公司主要的产品包含自动泊车控制器,L2.5 ADAS域控制器,自动驾驶AD域控制器,远程驾驶域控制器,以及关联的地图盒子,EDR等产品。
谢谢大家!
原文标题:布谷鸟同创:国内企业与国外Tier在智能泊车技术上处于同一起跑线
文章出处:【微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
控制器
+关注
关注
112文章
16380浏览量
178288 -
智能驾驶
+关注
关注
3文章
2531浏览量
48785 -
自动驾驶
+关注
关注
784文章
13836浏览量
166520
原文标题:布谷鸟同创:国内企业与国外Tier在智能泊车技术上处于同一起跑线
文章出处:【微信号:zuosiqiche,微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何实现自动驾驶规控算法的仿真验证

新品发布 | TOSUN正式推出GPS转CAN FD模块产品,为自动驾驶提供数据支持

一文理解布隆过滤器和布谷鸟过滤器

重塑线控底盘技术:自动驾驶的未来支柱
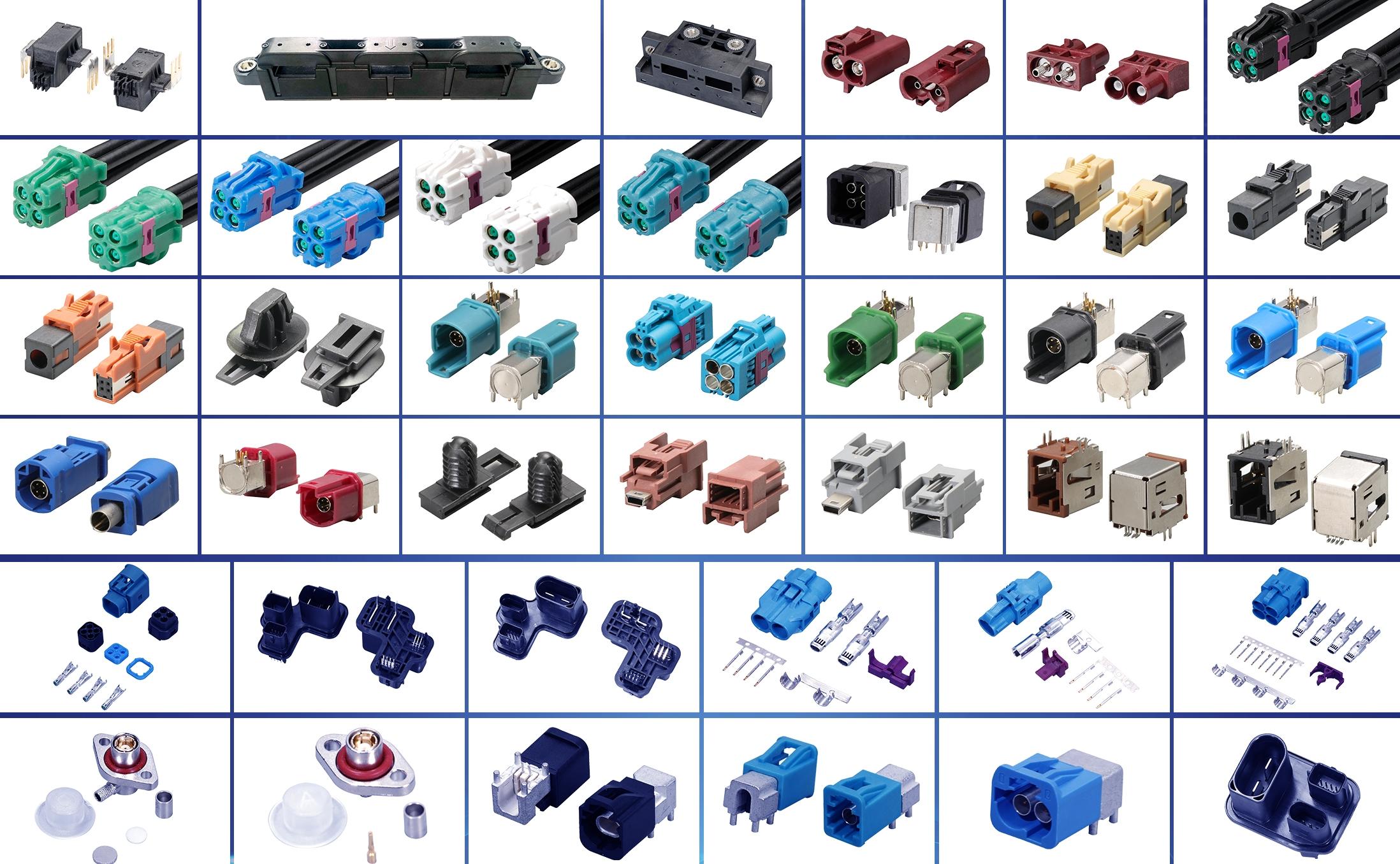
自动驾驶演变下,汽车连接器市场如何扩容?
浅谈自动驾驶技术的现状及发展趋势

FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
自动驾驶识别技术有哪些
嵌入式热门领域有哪些?
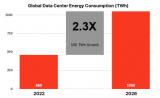
使用AmpereOne遏制快速增长的能源需求





 工商网监
工商网监
评论