 机器人安全使用要遵循哪些原则?
机器人安全使用要遵循哪些原则?
设备正常的安全机构是保证人身安全的前提,安全机构检查应纳入日常点检范围内,机器人安全使用要遵循以下原则:
不随意短接;
不随意改造;
不随意拆除;
操作的规范。
具体检查项目如下:
1.机器人紧急停止按钮的检查,包括控制柜急停开关和手持操作盒急停开关。
检查方法:按下控制柜上“紧急停止”按钮,确认画面是否显示“SRVO-001 Operator panel E-stop”自诊断信息;
按MENU——选择4 ALARM显示报警画面。
顺时针方向旋转拉出“紧急停止”按钮后按下RESET复位按钮,确认画面上的紧急停止报警信息是否消失。
按下手持操作盒上“紧急停止”按钮,确认画面是否显示“SRVO-002 Teach pendant E-stop”自诊断信息;
按MENU——选择4 ALARM显示报警画面。
顺时针方向旋转拉出“紧急停止”按钮后按下RESET复位按钮,确认画面上的紧急停止报警信息是否消失。
2.安全门及门开关的检查。
检查方法:机器人处于停止状态、控制柜模式开关处于AUTO位置、机器人没有显示任何报警信息。
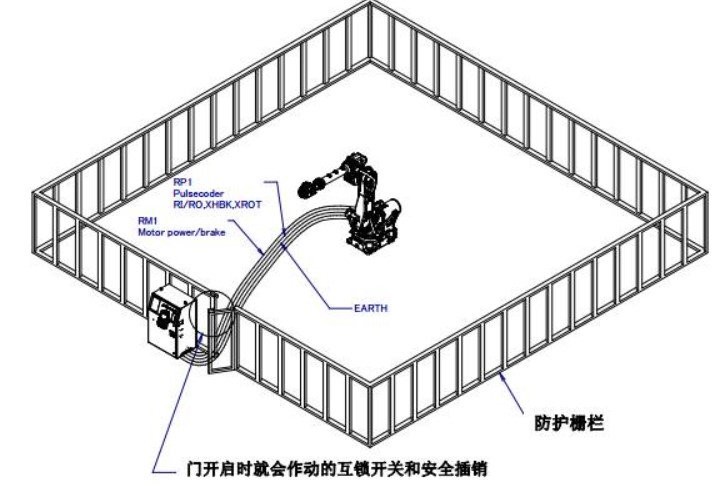
拉开安全门,确认画面是否显示“SRVO-004 Fence open”自诊断信息;按MENU——选择4 ALARM显示报警画面。
关上安全门后按下系统复位按钮,确认画面上的门开关报警信息是否消失。
3.外部紧急停止开关的检查。
检查方法:机器人处于停止状态下、机器人没有显示任何报警信息,按下外部急停按钮;确认画面是否显示“SRVO-007 External E-stop”自诊断信息;按MENU——选择4 ALARM显示报警画面。
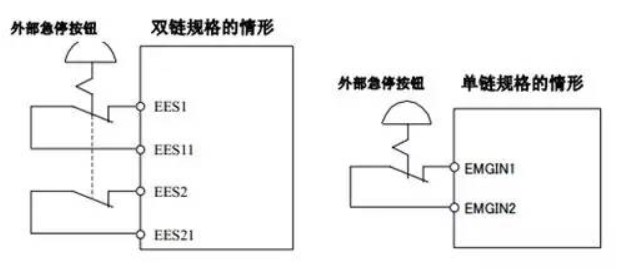
顺时针方向旋转拉出“紧急停止”按钮后按下RESET复位按钮,确认画面上的紧急停止报警信息是否消失。
备注:R-30IB系列控制器安全信号全为双链规格,R-3IB MATE、R-30IA MATE、R-30IB、R-30IB MATE控制柜的安全门和外部急停信号连接于机器人控制器内E-stop板上,R-J3IB和R-30IA(R-J3IC)控制柜的安全门和外部急停信号连接于机器人控制内PANEL BOARD(配电盘)上。
责任编辑:lq6
-
机器人
+关注
关注
212文章
28938浏览量
209722
原文标题:FANUC机器人日常安全检查
文章出处:【微信号:AMTBBS,微信公众号:世界先进制造技术论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【书籍评测活动NO.58】ROS 2智能机器人开发实践
如何选择并整合多维安全系统来保护工人免受协作机器人伤害
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
【「具身智能机器人系统」阅读体验】+初品的体验
安全光栅在工业机器人上的应用

安防巡检机器人:守护安全的智能卫士






 工商网监
工商网监
评论