 如何使用基于模型的设计开发基于PLC的控制器?
如何使用基于模型的设计开发基于PLC的控制器?

抽吸疏浚是一项船上作业流程。吸扬挖泥船的复杂装置集液压、机械和电气组件于一身,深入海床挖沙,再转移到其他地点,可用于填海造岛、扩建港口、加深航道或恢复海滩。
图 1.吸扬挖泥船。传统挖泥船控制器设计分别在两个硬件平台上进行:传感器监测和作动流程在 PLC 上实现,而较复杂的算法则在 PC 工作站上实现。接着,在调试和海上试运转阶段,对两种系统开展充分的测试。 我们的工程团队采取了一种新方法,利用了现代 PLC 的强大处理核心。我们使用基于模型的设计以及 MATLAB 和 Simulink 开发完整控制器并在单一 PLC 上实现。
然后,我们使用在另一 PLC 上运行的物理系统 Simscape 模型运行硬件在环 (HIL) 测试。 尽管团队是初次接触基于模型的设计和挖泥船控制应用,而且只有三名工程师,但是仅用了短短四个月就完成了原型控制器设计,用于精确控制安装在 30 米吸管上的耙头,使其位置与目标深度相差不超过 5 厘米。现在,我们将开发的被控对象模型作为挖泥船的数字孪生,用它来完成挖泥船的虚拟调试。
建模和桌面仿真
在项目第一阶段,我们为控制系统的两个核心模块构建了模型:吃水和负载监测 (DLM) 与吸管定位监测 (STPM)。DLM 模块实时测量船舶吃水及当前船舶负载状态,然后通过这些测量数据计算纵倾和横倾。STPM 模块计算并监测吸管和耙头的位置。此模块是系统最复杂的部分之一,因为它使用测斜仪、压力传感器及其他一些传感器的测量数据进行复杂变换,包括旋转和平移。相关计算结果将决定控制吸管的线缆的伸缩幅度。
下一阶段,我们为自动耙头绞盘控制 (ADWC) 模块构建模型,使耙头(即安装在吸管末端的集砂器)在疏浚过程中保持在指定位置。此模块负责驱动船舶的绞盘及控制波浪补偿器,抑制因波浪作用引起的船体振荡,以确保耙头与水底保持接触。 在设计控制器的同时,我们还使用 Simscape 和 Simscape Multibody 开发了被控对象物理模型。
团队各成员分别负责某一特定物理域的各个设计层面。例如,一位成员负责机械连杆和关节,一位成员负责电动机和电气子系统,还有一位成员负责液压装置。整个被控对象模型涵盖所有这些物理域,并且包含一个船只模型。因此,我们可以仿真整套系统,了解各组件如何随着船只负载和浮心的变化协同工作。
我们结合使用控制器和被控对象模型,在 Simulink 中运行闭环仿真,验证 DLM、ADWC 和 STPM 模块的功能。
代码生成和 HIL 测试
我们在桌面上验证控制设计,再转移到 PLC 上开展实时 HIL 测试。我们从控制器模型生成 C 代码并将其部署到 Bachmann M1 PLC,之后使用该硬件在船只上进行生产部署。同时,我们将 Simscape 模型转换为 C 代码并部署到 Beckhoff CX2040 PLC,作为 HIL 测试的实时仿真器。关联两个 PLC,让控制器与被控对象模型能够实时交换传感器读数和作动命令。我们使用这一装置在各种工况下测试控制器,包括很多使用真船测试存在困难或危险的工况。
图我们创建了船只三维动画,以便在 HIL 测试期间观察船只和吸管动态行为。我们采用 HIL 装置并配合动画,向客户演示控制设计。在为期一天的演示中,我们触发故障,将仿真船舶和吸管置于极端工况,并展示控制器如何加以应对。鉴于演示非常成功,客户批准我们继续完成生产设计。
使用数字孪生进行虚拟调试
正式调试船只之前,我们使用 HIL 装置,将 PLC 上运行的控制器和被控对象作为数字孪生,在办公室里完成了大量调试测试。如果没有数字孪生,我们就不得不在真船上完成所有这些测试。正式调试期间,我们与船上作业团队合作解决控制器设计存在的问题。一旦船上作业团队发现问题,我们可以通过数字孪生复制问题,更新控制器模型,在数字孪生上验证修复效果,然后将更新反馈给船只。
借助数字孪生,Ingeteam 提前完成了调试,目前该控制系统已在三艘船上投入使用。现阶段,我们采用基于模型的设计和基于 PLC 的 HIL 测试,同时结合数字孪生,致力于加快重型起重船控制系统的开发进度。
原文标题:数字孪生:使用基于模型的设计开发基于 PLC 的控制器
文章出处:【微信公众号:MATLAB】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
控制器
+关注
关注
114文章
17918浏览量
195851 -
plc
+关注
关注
5052文章
14939浏览量
489422
原文标题:数字孪生:使用基于模型的设计开发基于 PLC 的控制器
文章出处:【微信号:MATLAB,微信公众号:MATLAB】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
探索 ATMega328 微控制器:嵌入式开发新选择
SDRAM工业动态随机存储器在可编程逻辑控制器(PLC)的应用
什么是PLC网关?如何远程控制PLC?

同样能做采集控制,ARM边缘AI控制器与PLC究竟区别在哪里?


MCU微控制器在工业自动化中的关键作用
EtherNet/IP转Modbus TCP:电机控制器产线罗克韦尔PLC与西门子S7-1200的转换


电源控制器MCU硬件在环(HIL)测试方案
轻松就能搞定二次开发的树莓派工业控制器!

无刷直流电机助力式EPS控制器设计与试验
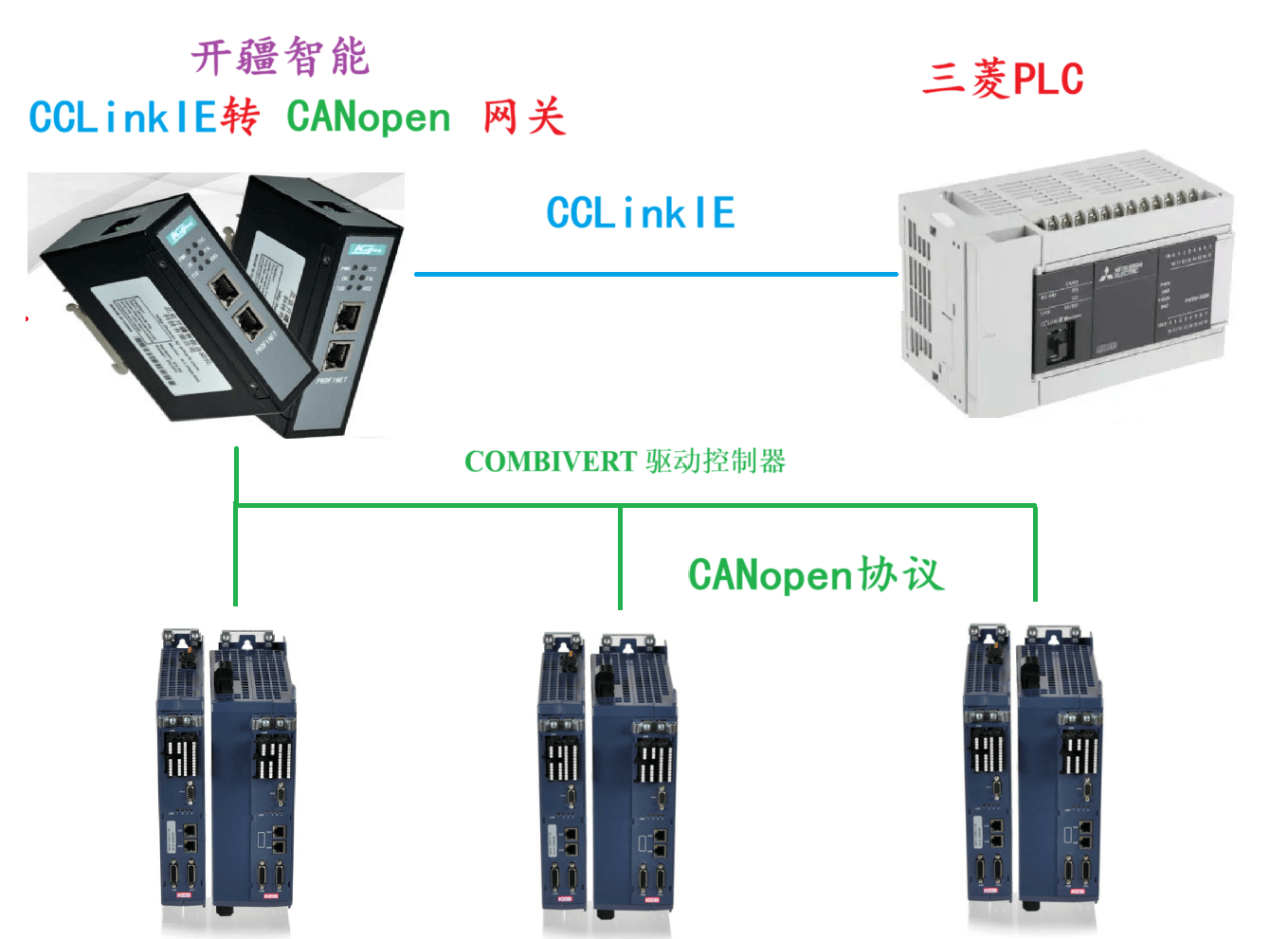
开疆智能CCLinkIE转CANopen网关连接COMBIVERT驱动控制器配置案例
远程数据采集控制器是什么?PLC自控,智能联动




评论