 机器视觉是什么?如何去检测表面缺陷?
机器视觉是什么?如何去检测表面缺陷?
工业产品的表面缺陷对产品的美观度、舒适度和使用性能等带来不良影响,所以生产企业对产品的表面缺陷进行检测以便及时发现并加以控制。
机器视觉的检测方法可以很大程度上克服人工检测方法的抽检率低、准确性不高、实时性差、效率低、劳动强度大等弊端,在现代工业中得到越来越广泛的研究和应用。
机器视觉技术是一种无接触、无损伤的自动检测技术,是实现设备自动化、智能化和精密控制的有效手段,具有安全可靠、光谱响应范围宽、可在恶劣环境下长时间工作和生产效率高等突出优点。
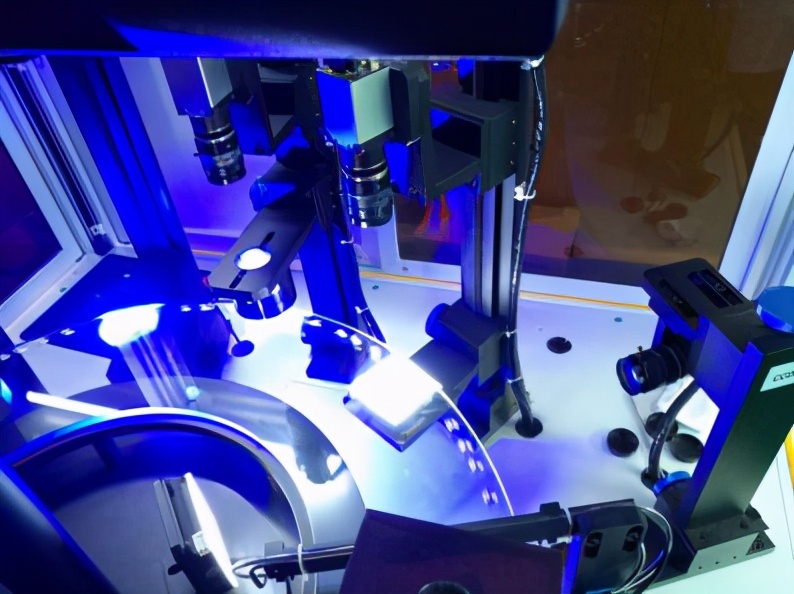
机器视觉检测系统通过适当的光源和图像传感器(CCD摄像机)获取产品的表面图像,利用相应的图像处理算法提取图像的特征信息,然后根据特征信息进行表面缺陷的定位、识别、分级等判别和统计、存储、查询等操作; 机器视觉表面缺陷检测系统基本组成,主要包括图像获取模块、图像处理模块、图像分析模块、数据管理及人机接口模块。 图像获取模块由工业相机、光学镜头、光源及其夹持装置等组成,其功能是完成产品表面图像的采集。在光源的照明下,通过光学镜头将产品表面成像于相机传感器上,光信号先转换成电信号,进而转换成计算机能处理的数字信号。目前工业用相机主要基于CCD或CMOS芯片的相机。CCD是目前机器视觉最为常用的图像传感器。
机器视觉光源直接影响到图像的质量,其作用是克服环境光干扰,保证图像的稳定性,获得对比度尽可能高的图像。目前常用的光源有卤素灯、荧光灯和发光二级管(LED)。LED光源以体积小、功耗低、响应速度快、发光单色性好、可靠性高、光均匀稳定、易集成等优点获得了广泛的应用。
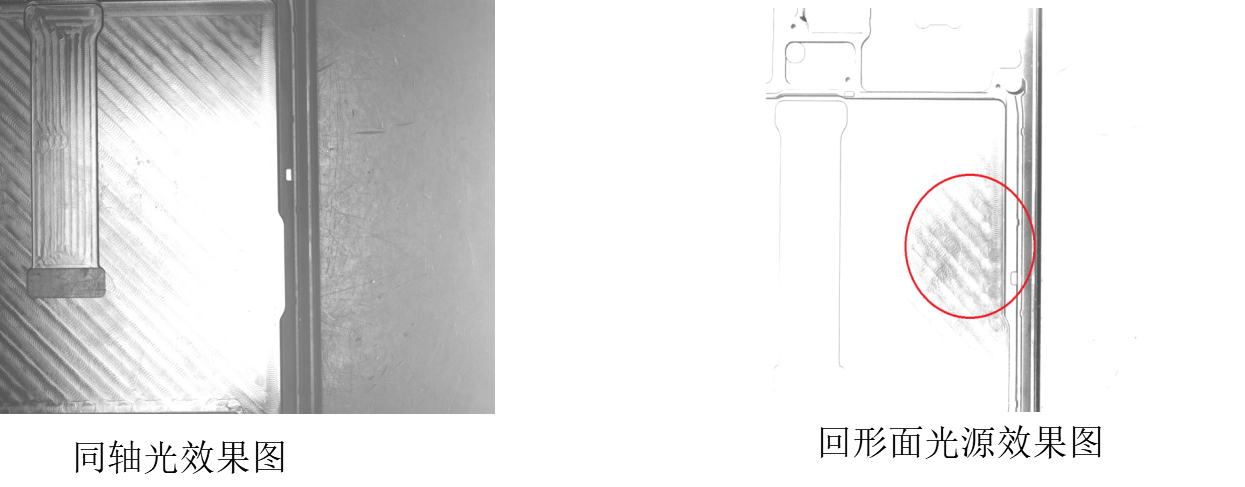
由光源构成的照明系统按其照射方法可分为明场照明与暗场照明、结构光照明与频闪光照明。明场与暗场主要描述相机与光源的位置关系,明场照明指相机直接接收光源在目标上的反射光,一般相机与光源异侧分布,这种方式便于安装;暗场照明指相机间接接收光源在目标上的散射光,一般相机与光源同侧分布,它的优点是能获得高对比度的图像。结构光照明是将光栅或线光源等投射到被测物上,根据它们产生的畸变,解调出被测物的3维信息。频闪光照明是将高频率的光脉冲照射到物体上,摄像机拍摄要求与光源同步。
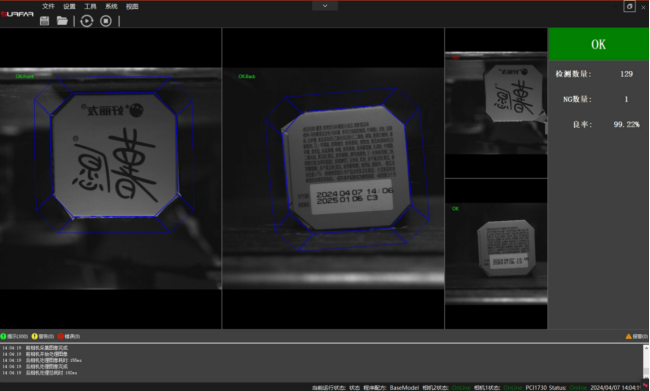
图像处理模块主要涉及图像去噪、图像增强与复原、缺陷的检测和目标分割。由于现场环境、CCD图像光电转换、传输电路及电子元件都会使图像产生噪声,这些噪声降低了图像的质量从而对图像的处理和分析带来不良影响,所以要对图像进行预处理以去噪。 图像增强目的是针对给定图像的应用场合,有目的地强调图像的整体或局部特性,将原来不清晰的图像变得清晰或强调某些感兴趣的特征,扩大图像中不同物体特征之间的差别,抑制不感兴趣的特征,使之改善图像质量、丰富信息量,加强图像判读和识别效果的图像处理方法。
图像复原是通过计算机处理,对质量下降的图像加以重建或复原的处理过程。图像复原很多时候采用与图像增强同样的方法,但图像增强的结果还需要下一阶段来验证;而图像复原试图利用退化过程的先验知识,来恢复已被退化图像的本来面目,如加性噪声的消除、运动模糊的复原等。图像分割的目的是把图像中目标区域分割出来,以便进行下一步的处理。
表面缺陷检测应用的领域十分广泛,主要包括钢铁冶金,有色金属加工,高精铜板带,铝板带,铝箔,不锈钢制造,电子素材,无纺布,织物,玻璃,纸张,薄膜等领域。
责任编辑:lq6
-
机器视觉
+关注
关注
163文章
4433浏览量
121128
原文标题:【拓斯达 | 干货】机器视觉表面缺陷检测方法解析
文章出处:【微信号:gaogongrobot,微信公众号:高工机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
机器视觉检测应用场景:缺陷检测、尺寸测量、引导定位、运动控制
视觉检测是什么意思?机器视觉检测的适用行业及场景有哪些?
机器视觉在焊接质量检测中的应用
明治案例 | 【非标缺陷检测】 FEB管黑色杂质

机器视觉的四大类应用是什么?
外观缺陷检测原理

智能手机外壳机器视觉检测方案
赛默斐视X射线薄膜测厚仪与薄膜表面缺陷检测
一文get机器视觉检测设备的组成要素







 工商网监
工商网监
评论