 基于GPS/MEMS组合芯片实现高精度定位解决方案
基于GPS/MEMS组合芯片实现高精度定位解决方案
作者:Dvir Rosenfeld,CellGuide有限公司的研发副总裁
在过去十年中,GPS定位已经从主要由专业人员使用的专用高端技术转变为消费者日常使用的一种技术。这种转变是具有GPS功能的两代器件在大众化设备中普及GPS定位功能的结果。本文将讨论下一个令人兴奋的GPS发展阶段,它能解决用户经常在最需要的时候无法获得GPS定位信息的问题。
在过去十年中的早些时候,出现的第一代设备是配件市场中的个人导航设备(PND),它以大众化的价位实现了转弯提示导航功能。发展第二阶段的标志是智能手机的出现。今天的智能手机可以提供各种定位功能,并且主要依赖GPS功能实现精确的定位和转弯提示导航应用。具有GPS功能的智能手机不仅将转弯提示导航应用扩展到了行人、骑车者和司机,而且能够向任何智能手机应用提供定位能力,从当地餐馆位置到“生动的”星座图,甚至增强现实。除了智能手机外,在其它消费产品中也出现了低成本定位技术,比如可以给照片增加地理标签的照相机。但如果室内、城市中心或树荫环境中的GPS性能局限能够克服的话,这种应用的影响和范围还可以得到极大的扩展。
智能手机的出现还导致发生了消费者不能立即觉察到的变化。在调查组成现代手机和智能手机的元器件后会发现两大明显的主要趋势。第一个趋势是将多个功能合并进单个集成电路(IC)后的芯片的普及。通常我们称之为“组合芯片”,目前市场上有许多组合,包括WiFi、蓝牙和GPS;另外一个趋势是基于MEMS的传感器的广泛使用。在过去几年中,MEMS技术的发展使得在手机平台中集成多个低成本的MEMS传感器成为可能。例如,目前许多智能手机都包含三种运动传感器——MEMS加速度计、电子罗盘和MEMS陀螺仪,当这些传感器一起使用时,可以提供手机的线性和角度位置、速度和加速度的精确跟踪。目前为止MEMS传感器基本上还是独立的芯片,每个芯片完成单一功能,但未来趋势是将运动传感器合并和集成为单个封装,再加入足够的处理能力,就可以智能地整合来自各个独立传感器的数据,并直接向应用提供有意义的运动矢量。
MEMS传感器的使用使得移动手机平台第一次能够测量与平台位置以及实际移动有关的参数。这类测量经常被称为“惯性测量”。在GPS和无线电导航领域中惯性测量(或INS—惯性导航系统)的使用是出了名而且成熟的。惯性导航经常用于在无线电导航很难或不可能完成的环境中改善无线电导航性能或作为补充。GPS接收机也会遇到这种情况,比如在人口密集的市中心、地下或室内。
了解两种定位方法之间的区别很重要。GPS或无线电导航通过测量距多个已知发射器的距离(或延时)来实现对移动接收机位置的三角测量。因此,GPS接收机每次执行测量后都会直接计算移动接收机的位置。无线电导航接收机中的这种直接位置测量方法的缺点是单次测量的误差会很大,有时甚至达到数十米,因此接收机通常要使用动态估计算法(如卡尔曼滤波器)将误差减小到可接受的水平。
另一方面,惯性导航系统测量的是平台的物理参数,如线性加速度(加速度计)、角加速度(陀螺仪)和绝对方位(3D罗盘)。通过对加速数据的积分处理,在初始位置已知的条件下,导航系统可以计算出用户的位置和方位。使用惯性导航系统的优势在于,测量误差通常要小于无线电导航接收机中直接定位技术产生的误差。然而,由于接收机要积分处理测量数据,误差会累积,如果长时间积分处理会导致位置“漂移”。因此很明显,当组合使用GPS和INS系统时两者可以互补。
在典型的组合式系统中,GPS接收机计算初始位置,INS系统产生距初始位置的位置差。为了避免由于INS引起的漂移误差,要用GPS接收机周期性地校准位置。自然有最优化的方式实现这种组合,通常是使用扩展卡尔曼滤波器来实现。
目前大多数GPS/INS实现使用的传感器都与移动平台结合在一起,并且一般安装在固定位置。以固定方式安装在汽车平台上的惯性传感器就是一个很好的例子。当INS单元与移动平台没有结合在一起时,比如一个人边走边用手握着蜂窝手机,这种平台中的GPS/INS导航使用的方法和算法通常都不能做到很高性能。然而近年来,随着对口袋移动定位应用预期的升温,比如徒步导航和室内导航(在购物大厅、公共建筑物、博物馆、展览馆等),这方面的研究工作非常多,目的是实现无限制的GPS/INS导航。最近不少研究结果表明,无限制的GPS/INS导航商用化已经很有希望。
结合将多种技术合并为组合芯片的趋势、以及对移动平台上同时实现GPS定位和MEMS传感器的要求,发展的下一步是开发出同时包含GPS技术和MEMS传感器的组合芯片。基于这些芯片的平台目的不是为了实现更高的集成度,而是体验更好的导航性能,在室内或人口密集的市中心等GPS挑战环境中第一次实现真正高精度的定位。
最近,GPS接收机制造商与Baolab Microsystems公司纷纷开展合作,后者是一家欧洲新创企业,开发的低成本MEMS技术可以用标准CMOS工艺制造。现在,组合芯片可以提供GPS和MEMS传感器解决方案——在单颗芯片产品中集成GPS和三维电子罗盘功能。这是在基于GPS/MEMS组合芯片的移动消费设备(移动手机、照相机等)中实现定位和导航的第一步。这种技术带来的可能性是无穷的,特别是这种解决方案能够显著降低成本,整体解决方案的实现成本比现有技术要低很多。
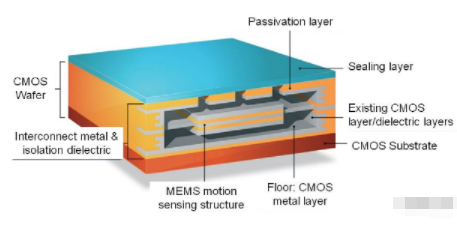
图2:Baolab Microsystems公司的NanoEMS 3D数字罗盘,从标准CMOS芯片内部的互连层蚀刻而成。
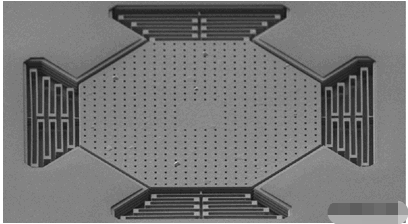
图3:NanoEMS CMOS罗盘部件“内部”显微图。
总之,目前情况是,当你最需要知道你的确切位置时,比如在人口密集的市中心、刚从地下停车场上来、在绿树成荫的地方、以及在移动设备越来越多使用的室内(大型购物中心、公共建筑物等),你却经常“无法获知”位置信息,因为GPS在这些地方不能正常工作。这主要是由于有太多的东西会阻挡信号,并使那些不能获得明显方向感的人感到困惑。但是,通过使用增强型GPS以及来自MEMS传感器的INS运动跟踪数据在这些缺少GPS信号的环境中实现高质量的动态导航,消费者几乎在任何地方都可以享受便携GPS增强应用的无缝工作,特别是在他们最需要的时候。
关于作者
Dvir Rosenfeld是CellGuide有限公司的研发副总裁,主要负责GNSS接收机和接收机组件的开发,包括射频、ASIC/VLSI、信号处理和软件。在加入CellGuide公司之前,Dvir在以色列国防工业中担任过多种研发要职,主要研究信号处理和雷达技术。Dvir拥有特拉维夫大学电子工程专业理学士学位。
责任编辑:gt
-
芯片
+关注
关注
456文章
51157浏览量
426815 -
mems
+关注
关注
129文章
3958浏览量
191038 -
gps
+关注
关注
22文章
2902浏览量
166642
发布评论请先 登录
相关推荐
高精度定位模块GPS+GLONASS
低成本高精度定位方案是未来市场趋势,基于uwb高精度定位的案例分析
广和通与华大北斗达成全球战略合作,携手打造高精度GNSS定位解决方案
GPS和伪卫星组合定位的应用介绍
高精度定位技术需求日益凸显,和SKYLAB了解一下高精度定位方案
立功科技推出高精度测距定位解决方案
什么是高精度定位平板?




物联网系统中高精度RTK定位方案的实现_高精度定位模块

智慧化工园区高精度室内定位解决方案





 工商网监
工商网监
评论