 图像的点云是如何拼接在一起的?
图像的点云是如何拼接在一起的?
理解好图像的点云拼接,需要从相机的模型说起。理解相机的成像原理之后,便可更为深刻的理解图像的点云如何拼接在一起。
首先说下相机的概念与原理。
相机概念与原理
相机的作用:将三维世界中的坐标点(单位为米)映射到二维图像平面(单位为像素)。
通常我们见到的相机都是针孔相机,但是不是简单的 针孔,还有透镜的畸变存在,所以在做图像处理时要进行畸变校正。
由于畸变的存在,我们在使用相机之前都要进行相机标定。
目的就是求出内参对于简单的应用求出径向畸变和切向畸变就够了。
所谓的外参就是相机的位姿。
有了外参、内参、图像、深度信息 便可以把图像中的点,转到世界坐标系下,并带有RGB的颜色。就形成了所谓的点云。
相关的公式也很好理解 ,就是通过相似三角形的原理。
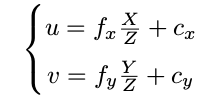
注意其中fx 、fy、 cx 、cy也就是相机的内参了。在相机出厂时会给出。
理解了相机的概念与原理,来编辑代码实现下。
Code实现
全部代码
先放上全部代码,再进行分段讲解
代码讲解
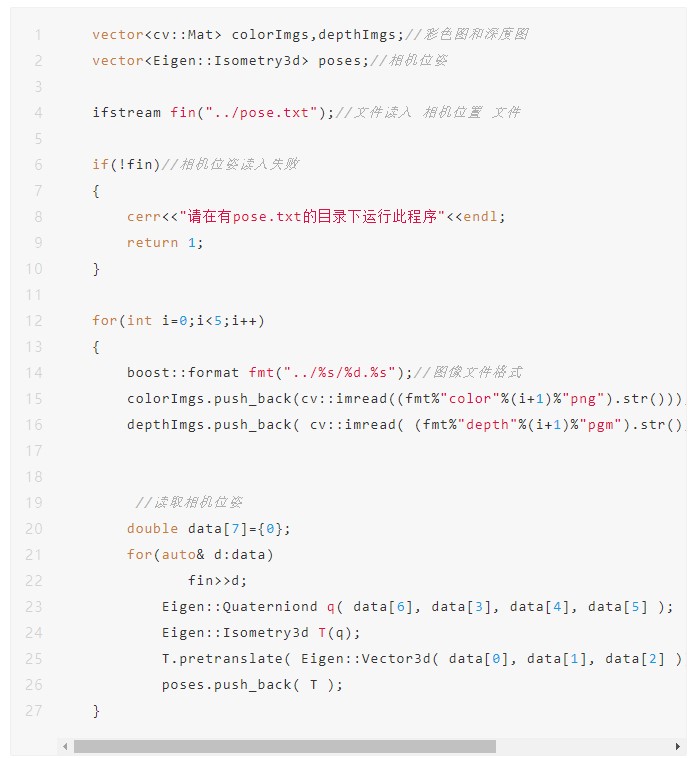
读取对应路径下的彩色图像、深度图像、相机的位姿。
上面说了,有了这三个量再加上相机内参,就可以得到点云。
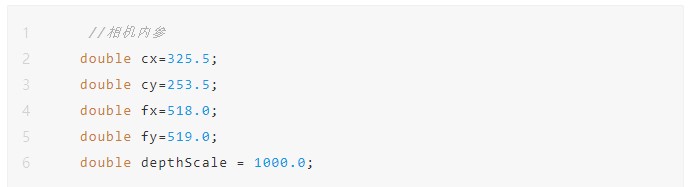
//相机内参
传说中的相机内参
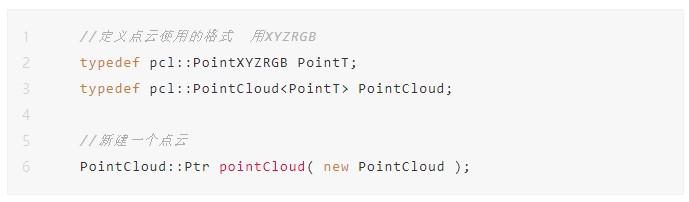
//定义点云使用的格式
声明pcl的格式创建一个点云,然后开始for循环处理每一张图片和对应的深度图片与相机位姿。


得到要处理的彩色图像深度图像对应的pose,然后for循环处理每一个像素。
得到深度信息
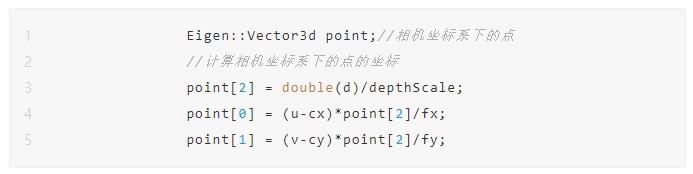
通过:
这个公式得到相机坐标系下的 x,y,z

相机坐标系下的点通过坐标变换转到世界坐标系下。
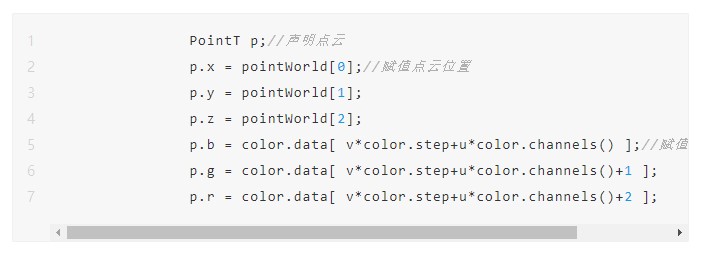
赋值点云的坐标与颜色。

保存成点云文件。
责任编辑:lq6
-
图像
+关注
关注
2文章
1091浏览量
40671 -
拼接
+关注
关注
0文章
16浏览量
12695
原文标题:图像的点云拼接-原理讲解与代码实现
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
ADS1217是需要2个电源隔离供电吗?还是接在一起,对测量精度有多大影响?
ADS1198有两个时钟,CLK和SCLK,这两个时钟信号能接在一起吗?
ADS1274“模拟地”和“数字地”是接在一起好,还是分开连接好?
TAS57XX当BCLK为64*fs的频率,BCLK和MCLK引脚连接在一起用,这个是对57XX所有芯片都适用吗?
OLED拼接屏被经常利用在哪些领域?







 工商网监
工商网监
评论