 刚刚起步的国产医用机器人产业迎来了好时光
刚刚起步的国产医用机器人产业迎来了好时光
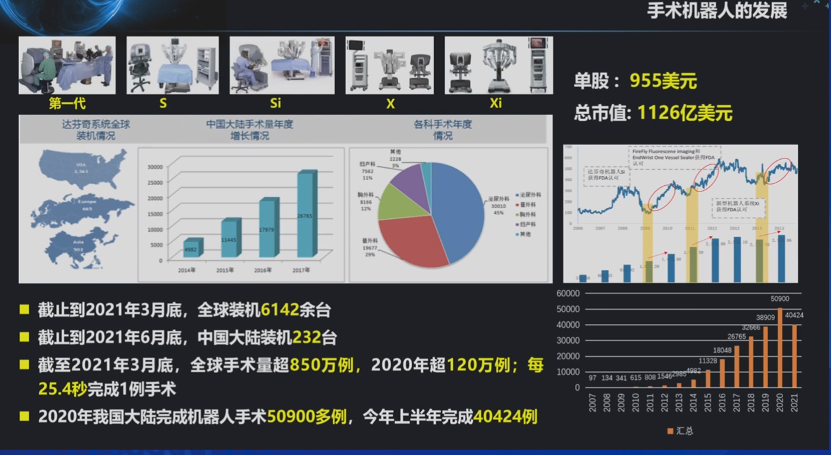
(文/程文智)说到医用机器人,人们比较容易想到能帮助医生做手术的“达芬奇”,它确实是目前全球最为成功的一款手术机器人。据统计截至今年3月,全球安装了6142台,截止今年6月底,国内安装了232台。今年上半年达芬奇在国内完成了4万多例手术,估计今年全年可完成10万例手术。
在国内,这几年医用机器人的发展速度也越来越快,特别是最近5到10年,出现了不少医用机器人公司。据苏州大学机电工程学院院长、机器人技术与系统国家重点实验室副主任孙立宁在第七届中国机器人峰会上介绍说,近期以医用机器人为名字的公司就有100多家,主要分布在长三角和珠三角地区,而且现在资本也很关注医用机器人产业。近期国内的医用机器人公司,比如微创、康多等公司的发展也很迅速。
在他看来,目前国内的医疗机器人生态圈基本已经成型,无论是高校、政府、资本、行业和标委会都在推动医疗机器人产业的创新与发展。
医用机器人产业规模
据中国食品药品检定研究院医疗器械检定所所长李静莉介绍,2020年全球医用机器人市场规模为180亿元,预计今年将达到207亿元,而中国的市场规模在2020年为41.5亿元,预计今年将达到47.7亿元,约占了全球市场规模的1/4。
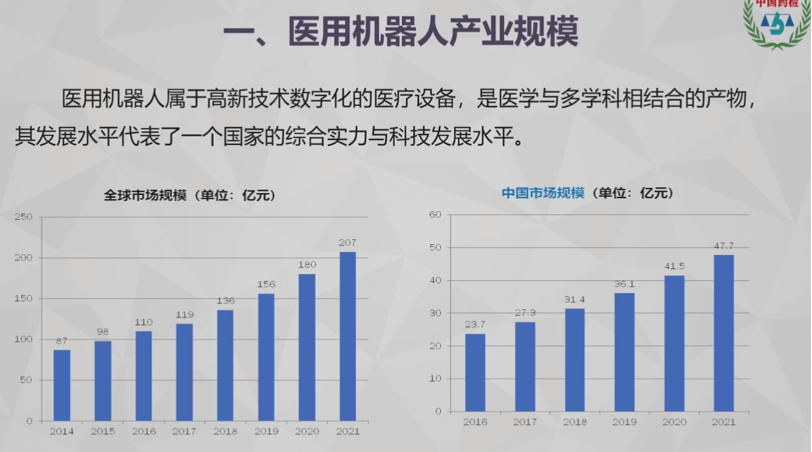
图:医用机器人产业规模
国内医用机器人的情况
来自哈尔滨工业大学的教授、机器人研究所副所长杜志江教授介绍了国内医用机器人,特别是手术机器人的发展情况。在他看来,目前已经进入到手术机器人的时代。
从医用机器人的特点来说,可分类为诊断型、操作型、康复型、服务型医用机器人。手术机器人一般是操作型的机器人,其最典型的代表是达芬奇。近几年来,达芬奇广为医院所接受,谈到具体原因时,杜志江教授表示有以下几个原因,一是,它继承了微创的理念;二是,可提供高清的视野;三是,学习曲线短;四是,术者在手术过程中不易疲劳。
因此,此类机器人出现以后,经过一段时间的市场培育后,现在,大部分的医院都是比较愿意接受这样的一套系统的。
其实,除了达芬奇以外,加拿大、荷兰、德国、英国、意大利、韩国和日本等国家在手术机器人方面都有布局,且纷纷拿到了他们国家的FDA认证,据说他们都想进入中国市场。
当然,除了这些国外的公司,国内也有不少公司推出了相关产品,比如哈尔滨的思哲睿、苏州康多、北京术锐、山东威高、上海微创、杭州术创、深圳精峰等等。
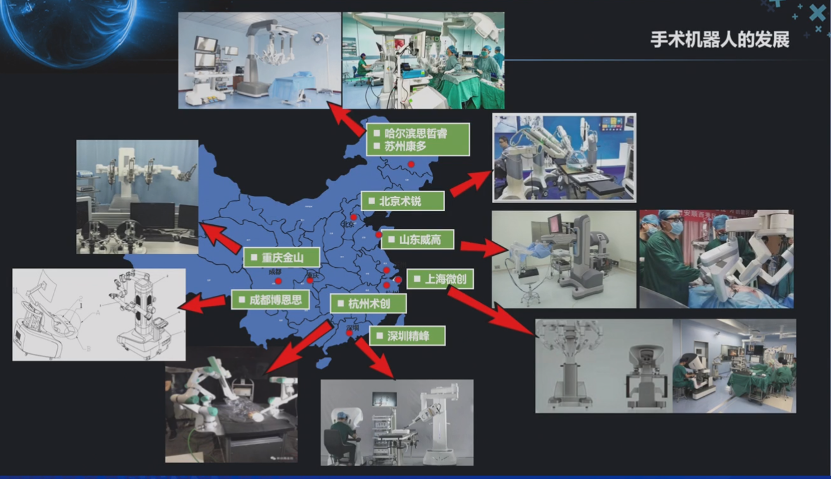
图:国内手术机器人主要供应商
据杜志江教授介绍,他们团队自2008年开始就致力于手术机器人的研究。2012年,在301医院的牵头下,哈工大、天津大学、南开大学几个大学一起在301动物实验室,使用手术机器人完成了活体动物实验,随后还完成了胆囊切除,及肾全切手术。
中国手术机器人的起步,开始于863计划的支持。杜志江表示,“最开始的项目就是腹腔镜手术机器人,虽然完成动物实验后,项目就可以结束了。但在刘老师的鼓励下,我们继续将这个系统往临床方面研究。”
他坦承,第一代手术机器人完全是从工科的思维出发,参照达芬奇系统进行设计研发的。后来在医生的参与下,他们给出了很多指导意见,比如以前很多东西无法在临床中应用,消毒很难解决、实时性等问题。为了解决这些临床中的问题,他们团队将整个系统都重新设计了,包括手术器件、控制台、控制系统等等。

图:杜志江教授团队开发的腹腔镜手术机器人
他同时谈到,国内的第一代医用机器人非常创新,但是临床上无法使用。当时大家都是用工科思维来做机器人,对医生需要什么、患者需要什么完全没有概念。杜志江举例说,“我们不知道病的位置,怎么辅助医生,也不知道手术过程中,医生真正用器械完成什么动作等等。”
国内医用机器人遇到的问题
杜志江教授还分享了一些他在多年做手术机器人过程当中观察到的一些情况,他主要归结为三个方面。
首先是创新与临床需求的关系。他认为做机器人研究创新是必要的,但一定要结合临床需求进行创新,而不能从工科思维出发,为了创新而创新,这样的话,最后在临床上会走不下去。
临床中医生的需求有很多,比如主从操作,多臂协同;对切口位置要求放宽;快捷摆位,减少准备时间;接口统一,能快速切换。
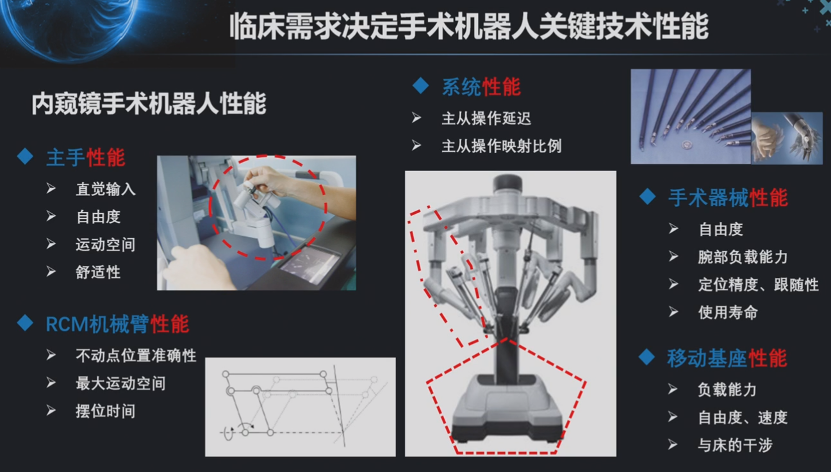
他拿内窥镜手术机器人的临床需求对手术机器人的性能要求举例说,从主手性能方面来说,
不能让医生在操作过程中考虑机器人往前、往后,他只考虑怎么做手术,主手必须完成医生的知觉输入,所有动作是下意识的,要识别出来。
从系统性能方面来说,一开始手术机器人的实时性都不行。实时性影响手术的流畅性,流畅性影响患者的安全性,实时性必须要保证。而你直接问医生多高的实时性能够满足要求,他们也是讲不出来的,只能通过感觉,不同的医生感觉不一样。有的人性子急,手术非常快,有的人手术慢一点,因此,对实时性的要求不一样。从系统的角度讲,主从操作的延迟性比较要达到最快医生的要求。
从RCM机械臂性能方面来说,医生做手术的时候,对腹壁的损伤都是有的,如果做不好,对患者伤害会很大,因此手术机器人在设计的时候就需要考虑不动点位置的准确性、最大运动空间,以及摆位时间问题。
第二是标准的问题,工业机器人跟医疗机器人的标准是不一样的。工业机器人大都是人机分离的,而医用机器人是人机共融的,从需求到状态都发成了根本性的改变,这样就要求有新的标准进行规范。事实上不仅是医用机器人,工业机器人也在制定从安全性、工作理念方面变更性的新标准,医用机器人更得做相应的标准。
目前国际机器人标准有ISO、IEC等,最近还成立了联合工作组,一开始叫JWG9,后来拆分成JWG35和36,其中35是针对手术机器人标准的,36是做康复机器人标准的。目前已经采用的两个标准是-77和-78。
第三是智能。现在的机器人离不开智能,但医用机器人的智能可能会变得更慎重。当年JWG9的时候,出台了T2,叫做60001-4-1,这也发布了。实际上来说,它对医疗机器人的智能分了16级,二个二进制,分了四个过程,按照现在从检查、诊断、确定手术方案、执行,这四大步骤由谁完成,到底是人还是机器,由机器完成代表水平高,由人完成代表水平低。按照这种分类的话,达芬奇这种处于第八级,执行层是机器完成的。
但是现在很多研究离临床还有很远的距离,反而智能水平达到15级,从检查开始都是自助完成的,但是这类系统真正进入临床还有非常遥远的距离。
首先智能程度跟风险等级没有直接的关系,但是它影响风险的管控过程。不是说智能高风险就高,但是需要进行管控。其次是引进智能以后,操作者和设备件的共同责任如何切分变得非常关键,这涉及到政策层面和法律层面,这是要关注的一点,不能真正在临床中引用智能,这要条规进行规范。
结语
目前手术机器人已经是临床的刚性需求,各科室的医生对此都非常感兴趣,它的形态和技术特性不取决于工科思维,而取决于临床需求和使用者反馈,此外,智能化也是目前大家所关注的,但不能为了追求智能而智能。
总的来说,国内医用机器人产业才刚刚起步,未来还有很长的路要走。
在国内,这几年医用机器人的发展速度也越来越快,特别是最近5到10年,出现了不少医用机器人公司。据苏州大学机电工程学院院长、机器人技术与系统国家重点实验室副主任孙立宁在第七届中国机器人峰会上介绍说,近期以医用机器人为名字的公司就有100多家,主要分布在长三角和珠三角地区,而且现在资本也很关注医用机器人产业。近期国内的医用机器人公司,比如微创、康多等公司的发展也很迅速。
在他看来,目前国内的医疗机器人生态圈基本已经成型,无论是高校、政府、资本、行业和标委会都在推动医疗机器人产业的创新与发展。
医用机器人产业规模
据中国食品药品检定研究院医疗器械检定所所长李静莉介绍,2020年全球医用机器人市场规模为180亿元,预计今年将达到207亿元,而中国的市场规模在2020年为41.5亿元,预计今年将达到47.7亿元,约占了全球市场规模的1/4。
图:医用机器人产业规模
国内医用机器人的情况
来自哈尔滨工业大学的教授、机器人研究所副所长杜志江教授介绍了国内医用机器人,特别是手术机器人的发展情况。在他看来,目前已经进入到手术机器人的时代。
从医用机器人的特点来说,可分类为诊断型、操作型、康复型、服务型医用机器人。手术机器人一般是操作型的机器人,其最典型的代表是达芬奇。近几年来,达芬奇广为医院所接受,谈到具体原因时,杜志江教授表示有以下几个原因,一是,它继承了微创的理念;二是,可提供高清的视野;三是,学习曲线短;四是,术者在手术过程中不易疲劳。
因此,此类机器人出现以后,经过一段时间的市场培育后,现在,大部分的医院都是比较愿意接受这样的一套系统的。
其实,除了达芬奇以外,加拿大、荷兰、德国、英国、意大利、韩国和日本等国家在手术机器人方面都有布局,且纷纷拿到了他们国家的FDA认证,据说他们都想进入中国市场。
当然,除了这些国外的公司,国内也有不少公司推出了相关产品,比如哈尔滨的思哲睿、苏州康多、北京术锐、山东威高、上海微创、杭州术创、深圳精峰等等。
图:国内手术机器人主要供应商
据杜志江教授介绍,他们团队自2008年开始就致力于手术机器人的研究。2012年,在301医院的牵头下,哈工大、天津大学、南开大学几个大学一起在301动物实验室,使用手术机器人完成了活体动物实验,随后还完成了胆囊切除,及肾全切手术。
中国手术机器人的起步,开始于863计划的支持。杜志江表示,“最开始的项目就是腹腔镜手术机器人,虽然完成动物实验后,项目就可以结束了。但在刘老师的鼓励下,我们继续将这个系统往临床方面研究。”
他坦承,第一代手术机器人完全是从工科的思维出发,参照达芬奇系统进行设计研发的。后来在医生的参与下,他们给出了很多指导意见,比如以前很多东西无法在临床中应用,消毒很难解决、实时性等问题。为了解决这些临床中的问题,他们团队将整个系统都重新设计了,包括手术器件、控制台、控制系统等等。
图:杜志江教授团队开发的腹腔镜手术机器人
他同时谈到,国内的第一代医用机器人非常创新,但是临床上无法使用。当时大家都是用工科思维来做机器人,对医生需要什么、患者需要什么完全没有概念。杜志江举例说,“我们不知道病的位置,怎么辅助医生,也不知道手术过程中,医生真正用器械完成什么动作等等。”
国内医用机器人遇到的问题
杜志江教授还分享了一些他在多年做手术机器人过程当中观察到的一些情况,他主要归结为三个方面。
首先是创新与临床需求的关系。他认为做机器人研究创新是必要的,但一定要结合临床需求进行创新,而不能从工科思维出发,为了创新而创新,这样的话,最后在临床上会走不下去。
临床中医生的需求有很多,比如主从操作,多臂协同;对切口位置要求放宽;快捷摆位,减少准备时间;接口统一,能快速切换。
他拿内窥镜手术机器人的临床需求对手术机器人的性能要求举例说,从主手性能方面来说,
不能让医生在操作过程中考虑机器人往前、往后,他只考虑怎么做手术,主手必须完成医生的知觉输入,所有动作是下意识的,要识别出来。
从系统性能方面来说,一开始手术机器人的实时性都不行。实时性影响手术的流畅性,流畅性影响患者的安全性,实时性必须要保证。而你直接问医生多高的实时性能够满足要求,他们也是讲不出来的,只能通过感觉,不同的医生感觉不一样。有的人性子急,手术非常快,有的人手术慢一点,因此,对实时性的要求不一样。从系统的角度讲,主从操作的延迟性比较要达到最快医生的要求。
从RCM机械臂性能方面来说,医生做手术的时候,对腹壁的损伤都是有的,如果做不好,对患者伤害会很大,因此手术机器人在设计的时候就需要考虑不动点位置的准确性、最大运动空间,以及摆位时间问题。
第二是标准的问题,工业机器人跟医疗机器人的标准是不一样的。工业机器人大都是人机分离的,而医用机器人是人机共融的,从需求到状态都发成了根本性的改变,这样就要求有新的标准进行规范。事实上不仅是医用机器人,工业机器人也在制定从安全性、工作理念方面变更性的新标准,医用机器人更得做相应的标准。
目前国际机器人标准有ISO、IEC等,最近还成立了联合工作组,一开始叫JWG9,后来拆分成JWG35和36,其中35是针对手术机器人标准的,36是做康复机器人标准的。目前已经采用的两个标准是-77和-78。
第三是智能。现在的机器人离不开智能,但医用机器人的智能可能会变得更慎重。当年JWG9的时候,出台了T2,叫做60001-4-1,这也发布了。实际上来说,它对医疗机器人的智能分了16级,二个二进制,分了四个过程,按照现在从检查、诊断、确定手术方案、执行,这四大步骤由谁完成,到底是人还是机器,由机器完成代表水平高,由人完成代表水平低。按照这种分类的话,达芬奇这种处于第八级,执行层是机器完成的。
但是现在很多研究离临床还有很远的距离,反而智能水平达到15级,从检查开始都是自助完成的,但是这类系统真正进入临床还有非常遥远的距离。
首先智能程度跟风险等级没有直接的关系,但是它影响风险的管控过程。不是说智能高风险就高,但是需要进行管控。其次是引进智能以后,操作者和设备件的共同责任如何切分变得非常关键,这涉及到政策层面和法律层面,这是要关注的一点,不能真正在临床中引用智能,这要条规进行规范。
结语
目前手术机器人已经是临床的刚性需求,各科室的医生对此都非常感兴趣,它的形态和技术特性不取决于工科思维,而取决于临床需求和使用者反馈,此外,智能化也是目前大家所关注的,但不能为了追求智能而智能。
总的来说,国内医用机器人产业才刚刚起步,未来还有很长的路要走。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28389浏览量
206924 -
医疗电子
+关注
关注
30文章
1360浏览量
90123 -
医疗机器人
+关注
关注
3文章
220浏览量
55634
发布评论请先 登录
相关推荐
《人形机器人产业地图(2024)》重磅发布!
在11月29日举办的2024高工人形机器人年会上,高工机器人产业研究所(GGII)重磅发布《人形机器人产业地图(2024)》(以下简称“
发表于 12-02 09:17
•493次阅读

旗晟机器人:在能源机器人产业推进委员会中探索发展
10月29日,杭州迎来了一场备受瞩目的行业盛会—— 能源机器人产业推进委员会第一届第一次委员大会 。此次大会由浙江省机器人产业发展协会主办,
2026年:人形机器人产业规模预计超200亿元大关
与投资的强劲驱动,预计人形机器人产业将在2024年和2025年迎来持续的高速增长,至2026年,我国人形机器人产业的规模有望突破200亿元大
医疗机器人有哪些_医疗机器人有哪些应用
医疗机器人是医用机器人工程的重要应用,结合了各个学科最新研究和发展的成果,并广泛应用于医学诊疗、康复等医学领域。医疗机器人的类型多种多样,以下是主要的一些类型:
地瓜机器人携手广和通共推智能机器人新纪元
2024年9月20日,深圳迎来了科技界的一场盛会——地瓜机器人开发者日暨新品发布会圆满举行。此次活动不仅见证了地瓜机器人在智能计算领域的又一里程碑,还深化了其与广和通作为官方授权硬件IDH合作伙伴的紧密合作,共同为智能
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
本帖最后由 Tronlong创龙科技 于 2024-7-19 17:18 编辑
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它
发表于 07-09 11:38
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
华数机器人合力打造产业发展生态
3月8日,重庆市两江新区党工委副书记、管委会副主任许宏球莅临华数机器人调研,两江新区产业促进局局长杨虹、两江新区科创局局长向悦文、两江投资集团总经理尹晓华等领导陪同,华数机器人董事长王群、总经理杨
PCB行业:用协作机器人,就选大族机器人
近年来,电子产业的爆发式需求,让PCB行业迎来了快速发展的同时,也带来了更加激烈的行业竞争。为了在拥挤的风口屹立不倒,许多PCB厂家选用协作安全、柔性生产、使用简单和部署快捷的协作机器人
全球首款具有仿人脊柱核心功能的人形机器人来了!
2023年被称为人形机器人产业化的“破晓时刻”,行业迎来爆发式增长,众多企业纷纷推出各自的人形机器人产品。
2024年,人形机器人迎来产业化元年
2023年,人形机器人Digit进入亚马逊工厂验证,2024年,特斯拉人形机器人,优必选、智元机器人有望分别进入特斯拉工厂和BYD工厂进行商业化验证,人形机器人迎来
发表于 01-23 11:30
•554次阅读
国产人形机器人产业发展现状
具备初级感知功能的智能化起步阶段(2001-2015年),进入二十一世纪,随着感知系统及交互系统等技术进步,人形机器人在该阶段可实现与外界环境有限的互动,并且运动自由度提升,能实现行走以外的其他简单行动操作,例如本田由 P系列所迭代出的 ASIMO 系列中的“All-ne






 工商网监
工商网监
评论