 STM32 RTC闹钟的中断和唤醒待机模式
STM32 RTC闹钟的中断和唤醒待机模式
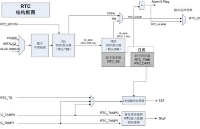
RTC代表的是实时时钟的意思,因为它提供的时钟基准比较准确所以用处还是很多的。
RTC全局中断:
void RTC_IRQHandler()
{
if(RTC_GetITStatus(RTC_IT_ALR)!=RESET) //是否闹钟中断发生
{
printf("THE ALARM READY =%d \r\n",RTC_GetCounter());//输出此时的秒数
RTC_ClearITPendingBit(RTC_IT_ALR);
PWR_BackupAccessCmd(ENABLE);
RTC_EnterConfigMode();
RTC_SetAlarm(40+RTC_GetCounter()); //配置下次闹钟为40s后
RTC_WaitForLastTask();
RTC_ExitConfigMode();
PWR_BackupAccessCmd(DISABLE);
}
if(RTC_GetITStatus(RTC_IT_SEC)!=RESET) //是否秒中断发生
{
printf("Time is =%d \r\n",RTC_GetCounter()); //输出此时的秒数
}
RTC_ClearITPendingBit(RTC_IT_SEC|RTC_IT_OW); //清除秒中断标志位和溢出位
RTC_WaitForLastTask();
}
待机唤醒:
待机模式是功耗最低的一种模式。外部复位(NRST 引脚)、 IWDG 复位、 WKUP 引脚上的上升沿或 RTC 闹钟事件发生时,STM32从待机模式退出。其中外部复位和WKUP的方法比较简单。主要讲一下RTC闹钟唤醒。这两个程序一个是让STM32的一个管脚接按键,按键按下的时候STM32进入待机状态,当40秒的闹钟到来时唤醒STM32.另一个是当按键按下时候进入待机状态,闹钟设置为5S秒后,闹钟来临时唤醒STM32。
void RTC_Init()
{
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP|RCC_APB1Periph_PWR,ENABLE);
PWR_WakeUpPinCmd(ENABLE);
PWR_BackupAccessCmd(ENABLE);
BKP_DeInit();
RCC_LSEConfig(RCC_LSE_ON);
while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET)
{
}
RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);
RCC_RTCCLKCmd(ENABLE);
RTC_WaitForLastTask();
RTC_WaitForSynchro();
RTC_ITConfig(RTC_IT_SEC, ENABLE);
RTC_WaitForLastTask();
RTC_EnterConfigMode();
RTC_SetCounter(0); //设置计数初始值
RTC_WaitForLastTask();
RTC_SetPrescaler(32767);
RTC_WaitForLastTask();
RTC_SetAlarm(40); //闹钟定时40S
RTC_WaitForLastTask();
RTC_ExitConfigMode();
NVIC_InitStructure.NVIC_IRQChannel = RTC_IRQn; //RTC全局中断 它的优先级要小于按键
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void EXTIX_Init(void)
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOC,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOC,GPIO_PinSource5);//配置按键PC5为外部中断
EXTI_InitStructure.EXTI_Line=EXTI_Line5;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn; //外部中断的优先级高于RTC
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x00;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x00;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void EXTI9_5_IRQHandler() //按键对应的外部中断
{
EXTI_ClearITPendingBit(EXTI_Line5);
PWR_EnterSTANDBYMode(); //进入待机模式
}
void RTC_IRQHandler() //RTC的中断
{
if(RTC_GetITStatus(RTC_IT_SEC)!=RESET)
{
printf("TIME IS =%d \r\n",RTC_GetCounter());
}
RTC_ClearITPendingBit(RTC_IT_SEC|RTC_IT_OW);
RTC_WaitForLastTask();
}
文章整合自:eeworld
编辑:ymf
-
实时时钟
+关注
关注
4文章
237浏览量
65658 -
中断
+关注
关注
5文章
895浏览量
41359
发布评论请先 登录
相关推荐
【GD32 MCU 入门教程】GD32 MCU 常见外设介绍(14)RTC 模块介绍





 工商网监
工商网监
评论