 麻省理工学院在NVIDIA DRIVE AGX Pegasus上开发全新自动驾驶技术
麻省理工学院在NVIDIA DRIVE AGX Pegasus上开发全新自动驾驶技术
在今年COMPUTEX上发表的论文详细介绍了综合深度神经网络的开发过程。
全新自动驾驶技术将能够“独当一面”。
麻省理工学院的研究人员正在开发一个一体化深度神经网络(DNN)为自动驾驶汽车提供支持,并取代由多个网络组成的系统。在今年COMPUTEX上发表的这项研究使用了NVIDIA DRIVE AGX Pegasus在车辆中运行网络,能够高效、实时地处理堆积成山的激光雷达数据。
自动驾驶汽车传感器会产生大量数据——如果一个由50辆车组成的车队每天行驶6小时,那么每天就会产生约1.6PB的传感器数据。若把所有这些数据都存储在1GB U盘上,这些U盘将能覆盖100多座足球场。
自动驾驶汽车必须即时处理这些数据才能感知周围环境并安全行驶。但由于数据量巨大,一个DNN很难完成这种处理,因此大多数方法都会使用多个网络和高清晰度地图。
在他们的论文中,麻省理工学院团队详细介绍了如何使用一个一体化DNN尝试新的自动驾驶策略,首先就是要完成实时激光雷达传感器数据处理任务。
通过运用高性能、高能效的NVIDIA DRIVE AGX Pegasus,该团队进一步加快激光雷达的计算速度以实现甚至超越这一目标,其运行速度比目前最先进的系统还要快15倍。
提高数据处理效率
如今,许多开发中的自动驾驶系统除了使用高清地图之外,还使用一系列DNN来处理传感器数据。这一组合能够使自动驾驶汽车快速确定自己在空间的位置并探测其他道路使用者、交通标志和其他物体。
虽然这种方法为安全自动驾驶提供了必要的冗余和多样性,但它很难在尚未进行测绘的地区实施。
此外,使用激光雷达传感器的自动驾驶系统需要每秒处理周围环境中的200多万个点。不同于2D图像数据,激光雷达点在3D空间中极为稀疏。由于没有针对此类数据的定制化架构,因此这对于现代计算硬件而言是一个巨大的挑战。
为了实现比基本架构更高的速度和能效,麻省理工学院团队开发出新的改进措施。
麻省理工学院的DNN能够执行整个自动驾驶系统的功能。这套完整的功能是通过使用大量人类驾驶数据来训练网络而实现的,这些数据教会了它能够像人类驾驶者那样将驾驶视为一个整体,而不是把驾驶分解成多个具体的任务。
虽然这种方法仍在开发中,但它具有很大的潜在优势。
在车辆中运行一个一体化DNN明显比运行多个专用网络更高效,这为其他功能开辟了计算空间。而且由于DNN依靠训练而不是地图来实现在未测绘道路上的导航,因此它具有更高的灵活性。随着效率的提高,车辆还能实时处理更多的丰富感知数据。
使用NVIDIA DRIVE大幅提高性能
当与高性能的中央计算系统相结合时,麻省理工学院发现其DNN的使用更加得心应手。
NVIDIA DRIVE AGX Pegasus是一款专为L4级和L5级自动驾驶系统设计的AI超级计算平台。它结合了两个NVIDIA Xavier SoC和两个NVIDIA Turing架构GPU的性能,实现了前所未有的每秒320万亿次运算性能。
麻省理工学院的研究人员已着手在某个计算系统上开发DNN。该系统不仅功能强大,而且在目前正在开发的自动驾驶系统中也很常见。
共同领导该项目的麻省理工学院博士生Alexander Amini表示:“我们希望有一个高度灵活的模块化AV系统,而NVIDIA正是这个领域的领导者。Pegasus能够处理来自各种传感器的输入流,让开发人员很容易实现他们的DNN。”
DNN的激光雷达感知能力只是麻省理工学院研究人员最初的自动驾驶开发目标。Amini表示,团队正在设法解决组合传感器流、与其他车辆之间更复杂的交互以及恶劣天气条件等问题——而这些问题的解决都用到了NVIDIA DRIVE解决方案。
编辑:jq
-
NVIDIA
+关注
关注
14文章
4994浏览量
103193
原文标题:独当一面:麻省理工学院在NVIDIA DRIVE AGX Pegasus上开发出一体化自动驾驶网络
文章出处:【微信号:sekorm_info,微信公众号:世强SEKORM】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
NVIDIA DRIVE技术推动自动驾驶发展
麻省理工学院研发全新纳米级3D晶体管,突破性能极限
麻省理工学院推出新型机器人训练模型
VILA与其他模型在提供边缘AI 2.0方面的表现
美国佐治亚理工学院一行莅临达实智能调研
FPGA在自动驾驶领域有哪些应用?
麻省理工学院研发RoboGrocery系统,杂货店自动化装袋新篇章
感谢东莞理工学院对我司导热系数测试仪的认可

苏黎世联邦理工学院报告:Rowhammer攻击对高端RISC-V CPU的潜在风险

一种用于化学和生物材料识别的便携式拉曼光谱解决方案
麻省理工与Adobe新技术DMD提升图像生成速度
霍尼韦尔与南方泵业开展战略合作,四川成都一家红外热成像专用图像处理芯片服务商完成A+轮融资

瑞士苏黎世联邦理工学院新型四足机器人单腿完成开关门、移动任务
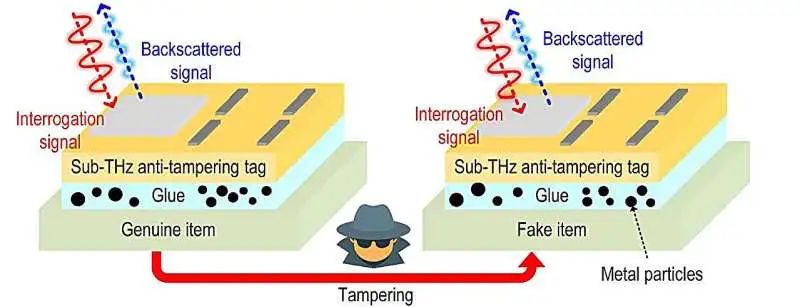
麻省理工学院开发出新的RFID标签防篡改技术
迷思科技获数千万Pre A轮融资,安森美和理想汽车续签长期供货协议





 工商网监
工商网监
评论