 如何在deepstream-app里调用USB与CSI摄像头
如何在deepstream-app里调用USB与CSI摄像头
前面介绍过使用 deepstream-app 工具,启用多个视频进行车辆与行人的识别,并且启动“追踪”功能进行物件追踪的高级功能,接下来就教大家如何在 deepstream-app 里调用 USB 与 CSI 摄像头,并且与先前的视频同时启用来进行物件识别的应用。
这里使用 Jetson Nano 2GB 作为实验平台,上面安装一个 CSI 摄像头与一个 USB 摄像头。
在调用摄像头之前,建议先确认一下摄像头的位置与分辨率等信息,因为 DeepStream 会检查设定文件里的分辨率是否符合要求。使用 v4l2-utils 工具包来检查摄像头的信息,请按照以下步骤进行安装,并且检测摄像头分辨率:
|
sudo apt-get install v4l2-utils v4l2-ctl --list-devices |
下面显示的信息,表示目前接上一个 imx-219 的 CSI 摄像头,以及一个 USB 2.0摄像头。

接下执行以下指令,查看个别摄像头可使用的分辨率为多少:
|
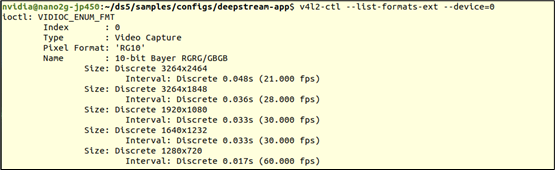
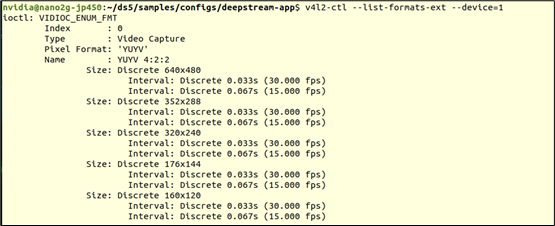
v4l2-ctl --list-formats-ext --device=0 v4l2-ctl --list-formats-ext --device=1 |
下面显示的信息,表示CSI摄像头(device=0)能支持3264x2464、3264x1848、1920x080、1640x1232、1280x720 等 5 种分辨率
下面显示的信息,表示 USB 摄像头(device=1)能支持 640x480、352x288、320x240、176x144、160x120 等 5 种分辨率
接下来看看在DeepStream路径(/opt/nvidia/deepstream/deepstream)的samples/configs/deepstream-app 下面有个 source2_csi_usb_dec_infer_resnet_int8.txt 文件,这是专门以 CSI 与 USB 摄像头为输入源的配置,里面可以看到以下关于摄像头设置的内容:
|
[source0] enable=1 #Type - 1=CameraV4L2 2=URI 3=MultiURI 4=RTSP 5=CSI type=5 camera-width=1280 camera-height=720 camera-fps-n=30 camera-fps-d=1 camera-csi-sensor-id=0 [source1] enable=1 #Type - 1=CameraV4L2 2=URI 3=MultiURI type=1 camera-width=1280 camera-height=720 camera-fps-n=30 camera-fps-d=1 camera-v4l2-dev-node=6 |
在[source1]下面的参数有点小问题,用粗体标识出来,因为我们装载的USB摄像头最大分辨率为640x480,因此这里的camera-width与camera-height都必须修改为摄像头所支持的分辨率,此外就是最下面的camera-v4l2-dev-node的部分,前面检查出来这台Jetson Nano 2GB上的USB摄像头编号为“1”,请按照实际状况修改。
将上面三地方修改完后,就可以直接执行以下指令去启动摄像头:
| deepstream-app -c source2_csi_usb_dec_infer_resnet_int8.txt |
由于配置文件里面原本设定使用INT8的精度去做推理,但是Jetson Nano 2GB并不支持,因此DeepStream自动切换成FP16精度,这需要重新生成对应的TensorRT引擎,会花点时间。

执行之后就能看的画面上出现类似以下的画面,上下分别是CSI摄像头与USB摄像头的显示,由于选择的模型是检测“Car”与“Person”的,所以在这里没有检测到任何目标物件。
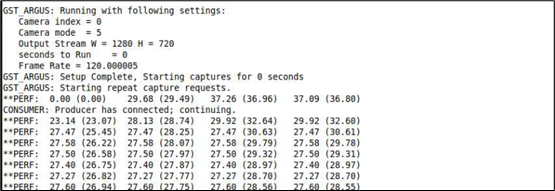
另外看一下先前下指令的终端上,显示在Jetson Nano 2GB上的执行性能如下截屏
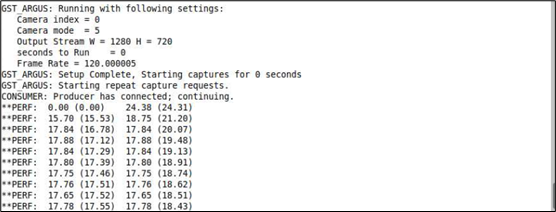
两个摄像头都能达到18FPS左右性能,总性能在36FPS左右,已经非常接近实时识别的速度,非常好。您可以试试旋转摄像头或者将手放在前面晃一晃,看看延迟状况如何?应该是很流畅的。
接下来,再添加两个视频文件一起进来执行检测,我们以系统上提供的视频文件做示范:
/opt/nvidia/deepstream/deepstream/samples/streams/sample_1080p_h264.mp4
/usr/share/visionworks/sources/data/pedestrians.h264
将这两个的设定添加到文件里的[source2]与[source3],内容如下:
|
[source2] enable=1 type=2 uri=file://../../streams/sample_1080p_h264.mp4 [source3] enable=1 type=2 uri=file:///usr/share/visionworks/sources/data/pedestrians.h264 |
最后调整文件最开始的“[tiled-display]”下面,将“columns=”的值改成“2”,存档后重新执行下面指令:
| deepstream-app -c source2_csi_usb_dec_infer_resnet_int8.txt |
现在可以看到如下图,两个摄像头与两个视频总共4个输入源同时执行的推理的功能。
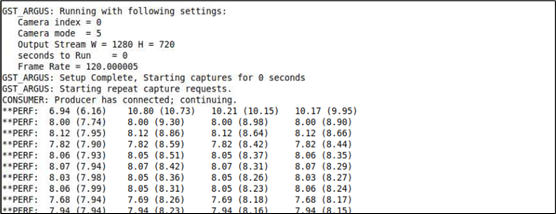
接下来看看此时的性能如何?居然每个输入源只剩下8FPS的性能,总性能在32FPS左右,似乎有点慢了。这个问题有补救的办法吗?
实时上问题出现在[primary-gie]使用的模型上,因为Jetson Nano(含2GB)的计算资源较为缺乏,因此DeepStream专门为Nano提供resnet10.caffemodel_b8_gpu0_fp16.engine特调版加速引擎,存放在“../../models/Primary_Detector_Nano”路径下,这是第一个需要做修改的地方:
model-engine-file=../../models/Primary_Detector_Nano/resnet10.caffemodel_b8_gpu0_fp16.engine
其次就是下面的“config-file”置换成支持Nano版本的配置文件,如下:
config-file=config_infer_primary_nano.txt
修改完使用的模型之后,重新执行deepstream-app进行物件检测,发现每个数据源的识别性能,立即从原本的8FPS提升到14FPS,也就是总性能从32FPS上升到56FPS左右,提升大约1.8倍。到这里否已经满足样的性能呢?
如果还觉得不满足的时候,那就继续看下去,还有大招在后面。只要我们将[primary-gie]下面的“interval”参数设为“1”,这时候再执行看看性能如何?
下面的截屏是调整 interval 参数之后的性能,有没有吓一跳?瞬间提升一倍。
经过三步骤调整之后,我们在Jetson Nano 2GB上的4个数据源,识别性能都超过27FPS,总性能合计超过100FPS,并且维持识别效果。
现在是不是对Jetson Nano 2GB的性能感到非常满意了!
编辑:jq
-
摄像头
+关注
关注
60文章
4897浏览量
96989
原文标题:NVIDIA Jetson Nano 2GB系列文章(30):DeepStream 摄像头“实时性能”
文章出处:【微信号:murata-eetrend,微信公众号:murata-eetrend】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
RT1176是否有任何驱动程序示例可以通过并行摄像头接口与8/10/12位摄像头通信?

飞凌嵌入式-ELFBOARD OV5640摄像头讲解第2期
摄像头及红外成像的基本工作原理

飞凌嵌入式-ELFBOARD OV5640摄像头简介第二期



如何通过RK3576配置MIPI-CSI摄像头的不同输出格式
摄像头模块突然无法显示!!!可能是什么原因?
使用esp-iot-solution master分支的usb_stream摄像头颜色不对是怎么回事?





 工商网监
工商网监
评论