 剖析新能源汽车旋转变压器驱动电路
剖析新能源汽车旋转变压器驱动电路
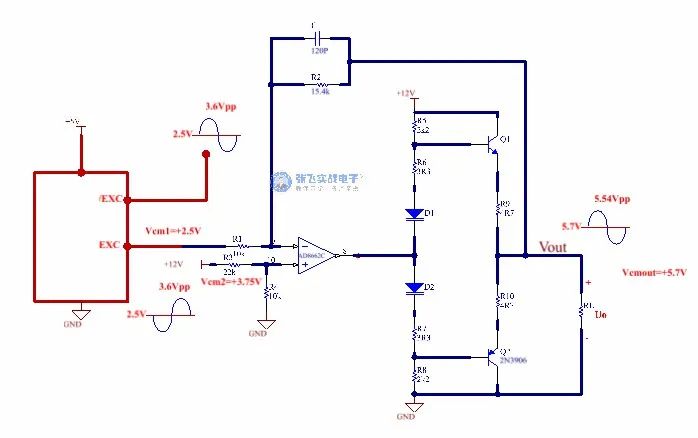
图(1) 旋变器的缓冲驱动电路
Q1和Q2管在Ui的作用下,其输入特性的中的图解分析如图3所示:
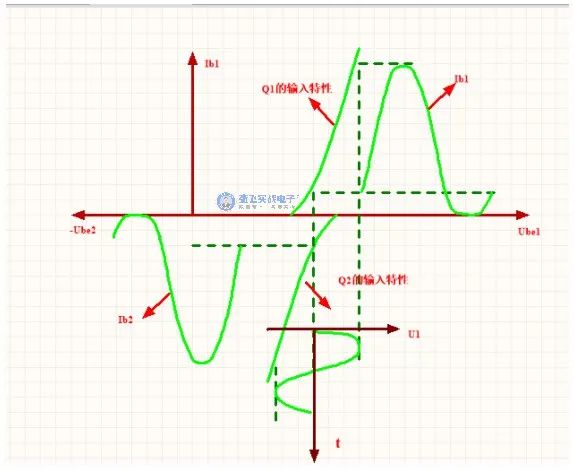
图(3) 输入特性的中的图解分析
综上所述,输入信号的正半周主要是Q1管发射极驱动负载,正负半周主要是Q2管发射极驱动负载,而且两管的导通时间都比输入信号的半个周期要长,即在输入电压很小的时候,两只管子同时导通,因而他们工作在甲乙类状态。
值得注意的是,若静态工作点失调,例如R6、D1、D2、R7中的任意一个元器件虚焊,则从VCC+12V经过R5、Q1管的发射结,Q2的发射结到R8到GND形成一条通路,有较大的基极电流Ib1和Ib2流过,从而导致Q1和Q2有很大的集电极电流Ic1和Ic2,且每只管子的管压降VCE都约等于VCC+12V,以至于Q1和Q2管可能因为功耗过大而损坏。因此,常在输出回路中接入熔断器以保护功放管和负载。
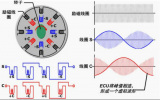
RDC 与旋转传感器配合使用,以便检测电机轴的位置和转速。在这种应用中,旋变器利用正弦波参考信号进行激励。初级绕组上的旋变器激励参考信号被转换为两个正弦差分输出信号:正弦和余弦。
正弦和余弦信号的幅度取决于实际的旋变器位置、旋变器转换比和激励信号幅度。RDC 同步采样两个输入信号,以便向数字引擎(即所谓 Type II跟踪环路)提供数字化数据。Type II 跟踪环路负责计算位置和速度。
由于旋变器的输入信号要求,激励缓冲器必须提供高达 200mA 的单端电流。图 1 所示的缓冲电路不仅提供电流驱动能力,而且提供 AD2S1210 激励输出信号的增益。本电路说明性能要求及推荐的激励缓冲拓扑结构,典型旋变器的输入电阻在100 Ω 至 200 Ω 之间,初级线圈应利用 7 V rms 的电压驱动。
该旋变解码芯片支持 3.15 V p-p ±27%范围的输入信号。AD2S1210的额定频率范围为 2 kHz 至 20 kHz。采用 Type II 跟踪环路跟踪输入信号,并将正弦和余弦输入端的信息转换为输入角度和速度所对应的数字量。该器件的额定最大跟踪速率为 3,125rps。
编辑:jq
-
新能源汽车
+关注
关注
141文章
10648浏览量
100314
原文标题:新能源汽车旋转变压器驱动电路讲解(二)
文章出处:【微信号:St_AMSChina,微信公众号:意法半导体AMG】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
变压器原理在新能源中的应用
电子变压器如何驱动DAB电路在新能源领域革新

请问AMC1210旋转变压器如何解调出位置?
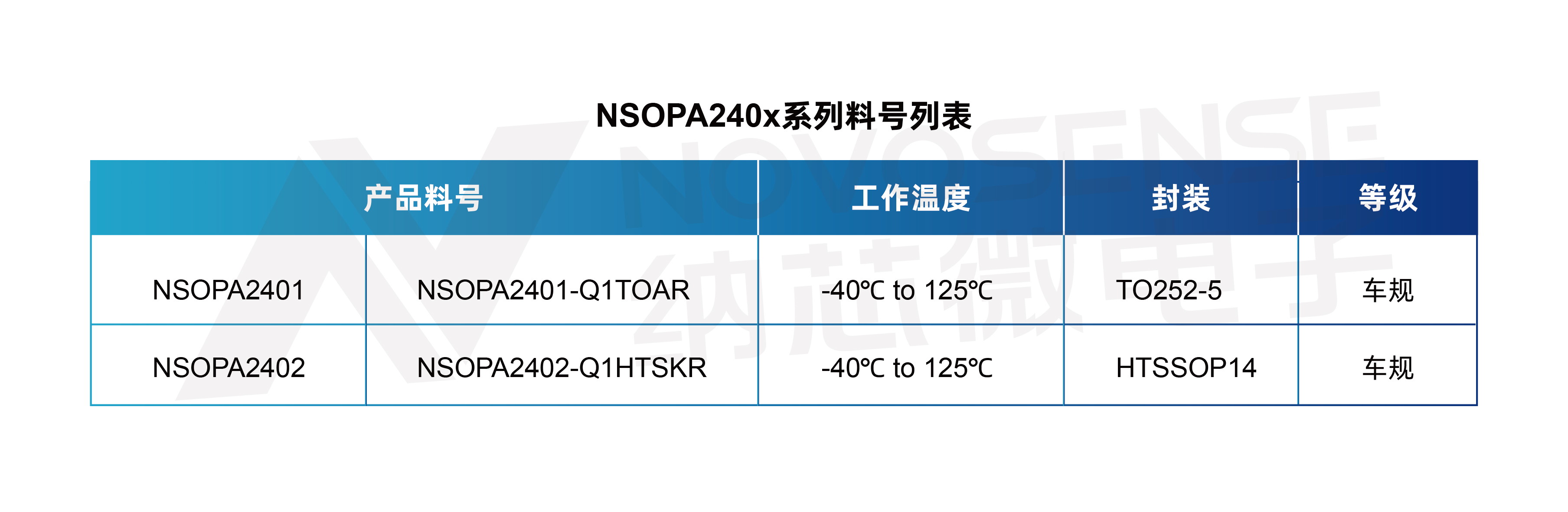
400mA、高输出压摆率,纳芯微NSOPA240x系列破解旋转变压器之“难”
旋转变压器在自动控制系统中的应用
旋转变压器在新能源汽车中的应用
旋转变压器的故障诊断方法
旋转变压器的工作原理和作用
AMEYA360代理:纳芯微NSOPA240x系列破解旋转变压器之“难”

纳芯微NSOPA240x系列运算放大器在旋转变压器驱动应用中的优势

在电动汽车牵引变频器应用中,磁传感器TLE5309D能否取代旋转变压器?
瑞萨高精度旋转变压器电机控制方案






 工商网监
工商网监
评论