 非局部平均滤波——NL-Menas的算法理论
非局部平均滤波——NL-Menas的算法理论
“ 双边滤波采用了距离与相似度因素,进行权重的计算,但在相似度计算时,仅仅是通过像素间的均方差(相似度)来计算权重,容易受噪声影响。而非局部平均滤波采用块之间的相似度计算,有效的提高了匹配的准确度,对噪声的抑制及边缘的保护程度更好。本文重点介绍非局部平均滤波——NL-Menas的算法理论。”
01
—
理论分析
前面的文章中,我已经讲了几种常见的2D滤波:
1)均值滤波:直接的加权平均,边缘模糊;
2)高斯滤波:考虑像素权重的正态分布,相比均值滤波对细节有一定提升;
3)双边滤波:同时考虑距离和相似度,对边缘的保持效果较好;
4)引导滤波:根据梯度变化求解线性滤波系数,公式的推导比较麻烦,算法对边缘保持效果比双边要好;
这里开始进一步介绍根据相似度计算权重的滤波:非局部平均滤波(NL-Means):基于块相似度匹配来确认权重,计算量比较大,但能获得比较好的效果,对边缘的保护程度也还可以。
高斯滤波和NLMeans的权重都符合高斯分布,区别是前者根据像素点之间的距离计算权重,后者根据块之间的相似度计算权重。要衡量两个邻域块的相似度,有多种指标,均方误差(MSE)是最常用的相似度衡量指标之一。非局部均值滤波算法就是使用MSE来计算两个邻域块的相似度。
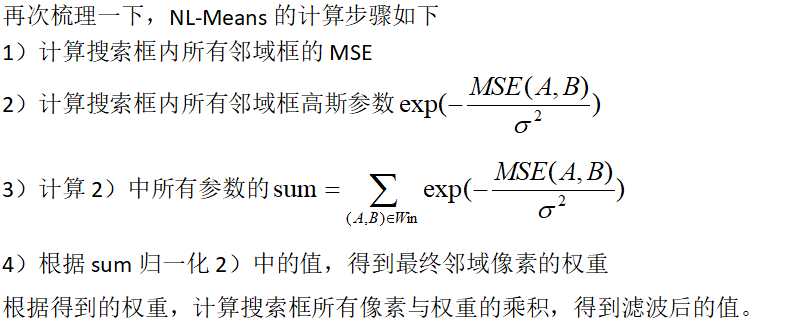
理论上,该算法需要在整个图像范围内判断像素间的相似度,也就是说,每处理一个像素点时,都要计算它与图像中所有像素点间的相似度。但是考虑到效率问题,实现的时候,会设定两个固定大小的窗口:搜索窗N*N和邻域窗口n*n。邻域窗口在搜索窗口中滑动,根据邻域间的相似性确定像素的权值。
02
—
公式推导
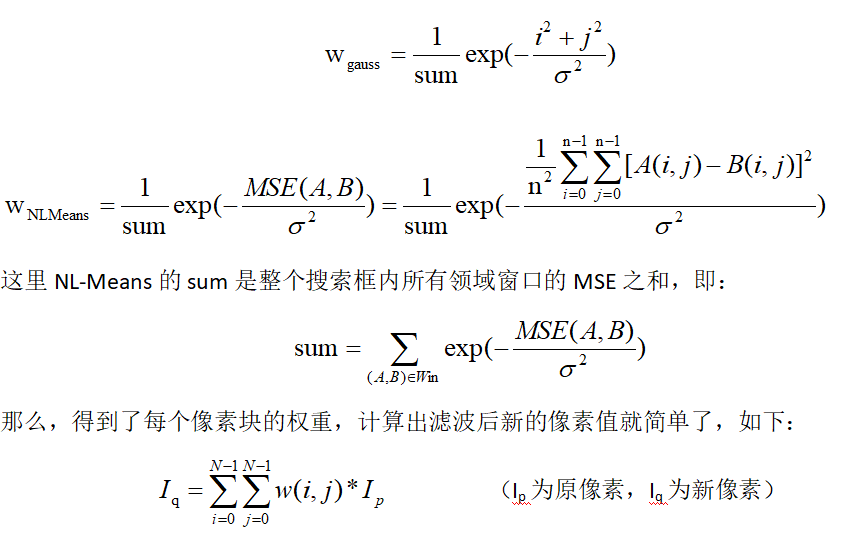
由于最终都需要归一化,那么直接去除固定参数,所以精简后的高斯参数与NLMeans的权重计算公式,如下所示:前者只考虑了距离,后者考虑了块之间的相似度。
编辑:jq
-
噪声
+关注
关注
13文章
1122浏览量
47443 -
滤波
+关注
关注
10文章
669浏览量
56689 -
MSE
+关注
关注
0文章
6浏览量
6580
原文标题:非局部平均滤波-NLMeans算法理论分析
文章出处:【微信号:sim_ol,微信公众号:模拟在线】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「从算法到电路—数字芯片算法的电路实现」阅读体验】+内容简介
STM32的ADC采样及各式滤波算法实现

常用的ADC滤波算法有哪些
高斯滤波和双边滤波的区别
基于CW32的仪表精度测量实现(一):相关滤波原理
bq2750x系列中的Impedance Track™电池电量监测算法的理论及实现

常见的滤波算法有哪些
基于COOT算法的局部阴影下光伏阵列MPPT控制研究
中伟视界:智能监控和预警,静止超时AI算法如何提升非煤矿山安全?
请问直通模式下如何添加特定频段的滤波算法?
CW32数字电压电流表软件教程(七):基本数据处理算法(均值滤波)
JPEG LS算法局部梯度值计算原理

机器学习六大核心算法深度解析





 工商网监
工商网监
评论