 移植RT-Thread的原理与方法
移植RT-Thread的原理与方法
大家好我是惊觉。是的,失踪人口回来了。最近参加了rt-thread的国产MCU移植活动,移植rt-thread到华大的HC32L196。rtt论坛中已有许多介绍移植到各种平台的文章,详细讲述移植步骤,在rtt论坛搜索“国产MCU移植”即可阅读。本文不介绍具体移植步骤,而是如往常一样,分享移植的原理与方法。
移植原理
移植一款软件,无非是获取源码,修改其中与硬件相关的代码以适配目标硬件。移植rt-thread也是如此,首要任务是要明确要修改哪部分内容。带着这个问题,我们来分析rt-thread的源码结构。
rt-thread源码结构
rt-thread源码根目录结构如下:
目录说明
bsp板级支持包。存放各种硬件平台的驱动代码,初始化代码,工程文件。
components组件。如finsh控制台,抽象层驱动,文件系统,网络系统。
examples示例程序
include内核以及libc的头文件
libcpu与CPU架构相关的接口,为操作系统调度提供支持。
src内核代码,如线程、定时器、线程间通信(互斥锁,信号量)。
移植所涉及的目录有两个:bsp和libcpu,相应的移植分为BSP移植与CPU架构移植。其他的目录与具体的CPU无关,无须改动。
CPU架构移植
在嵌入式领域有多种不同 CPU 架构,例如 Cortex-M、ARM920T、MIPS32、RISC-V 等等。为了使 RT-Thread 能够在不同 CPU 架构的芯片上运行,RT-Thread 提供了一个 libcpu 抽象层来适配不同的 CPU 架构。向下提供了一套统一的 CPU 架构移植接口,这部分接口包含了全局中断开关函数、线程上下文切换函数、时钟节拍的配置和中断函数、Cache 等等内容。下表是 CPU 架构移植需要实现的接口和变量。
函数和变量描述
rt_base_t rt_hw_interrupt_disable(void);关闭全局中断
void rt_hw_interrupt_enable(rt_base_t level);打开全局中断
rt_uint8_t *rt_hw_stack_init(void *tentry, void *parameter, rt_uint8_t *stack_addr, void *texit);线程栈的初始化,内核在线程创建和线程初始化里面会调用这个函数
void rt_hw_context_switch_to(rt_uint32 to);没有来源线程的上下文切换,在调度器启动第一个线程的时候调用,以及在 signal 里面会调用
void rt_hw_context_switch(rt_uint32 from, rt_uint32 to);从 from 线程切换到 to 线程,用于线程和线程之间的切换
void rt_hw_context_switch_interrupt(rt_uint32 from, rt_uint32 to);从 from 线程切换到 to 线程,用于中断里面进行切换的时候使用
rt_uint32_t rt_thread_switch_interrupt_flag;表示需要在中断里进行切换的标志
rt_uint32_t rt_interrupt_from_thread, rt_interrupt_to_thread;在线程进行上下文切换时候,用来保存 from 和 to 线程
是不是看起来挺复杂的,其实rtt已经支持了非常多的CPU架构。下图的libcpu目录中已支持多种CPU架构。让我们看看对arm系列的支持情况,从低端的cortex-m0到高端的cortex-m7,甚至还有cortex-a和cortex-r系列的。大家熟知的stm32f103为cortex-m3内核,stm32f407为cortex-m4内核。如果要移植到的目录芯片内核出现在此目录之中,那就无需关注libcpu,只要在配置文件中指定正确的内核即可。
我移植的HC32L196使用cortex-m0+内核,可使用cortex-m0的代码,因此无须进行CPU构架移植。
bsp结构
由于不需要进行CPU架构移植,所以本次移植相对简单,唯一的工作就是在rt-thread的bsp目录中创建自己硬件的bsp。
rt-thread当前支持了100多个bsp,可能大家用的最多的是stm32。不过我并不建议大家在移植时参考stm32,因为它是最复杂的一个bsp。早期rt-thread中关于stm32的bsp比较简单,各种型号如stm32f10x, stm32f40x都是独立的bsp。新手入门相对简单。不过弊病也很明显:随着支持的stm32系列的增加,bsp的子目录也就急剧增加,维护成本很高。
可能得益于stm32的HAL库,可以相对较低的投入将它们合为一个bsp。它们共用一份驱动代码,其在HAL_Drivers中。
可能以后国产MCU的bsp也会发展成这样,不过对于移植新手,最好是先易后难。我移植的HC32L196是华大单片机,以已经被rtt支持的hc32f4a0为模板进行移植。同时参考了swm320,以及stm32stm32l053-st-nucleo。
大多数bsp目录结构:
目录说明
applications用户代码。纯净的bsp中只需要一个main.c文件,里面定义main函数。
board板级驱动代码(最主要的是board.c),链接脚本(gcc, keil, iar)。
drivers设备驱动代码,比如gpio和uart驱动。
figures电路板照片。
Libraries芯片厂商驱动库。
.config, rtconfig.h, KconfigKconfig配置系统相关文件
rtconfig.py, SConscript, SConstructscons构建系统相关文件
template.uvprojx, template.uvoptxkeil模板工程
project.uvprojx, project.uvoptxkeil工程
template.eww, template.ewpiar模板工程
project.eww, project.ewpiar工程
可分为如下几类:
代码文件:applications, board, drivers, Libraries中的.h和.c
Kconfig配置系统相关文件
scons构建系统相关文件
工程模板
代码结构
先来看看我移植后的keil工程,其打开的几个目录就是涉及移植的代码目录。applications目录最为简单。drivers目录是移植的重点,不过它不是移植的首要任务。下面几节介绍移植前最迫切需要搞清楚的内容。
Kconfig
rtt支持通过menuconfig命令来配置内核、组件及软件包。执行menuconfig命令时,其从Kconfig文件中解析菜单结构,由用户勾选、配置各个选项,最终将配置结果写入.config和rtconfig.h。bsp中通常有两个Kconfig文件。一个位于根目录,另一个位于board。
根目录中的Kconfig仅仅是导入了别的目录的Kconfig,所有bsp的基本都一样,无须修改。
mainmenu “RT-Thread Project Configuration”
config BSP_DIR
string
option env=“BSP_ROOT”
default “。”
config RTT_DIR
string
option env=“RTT_ROOT”
default “。./。.”
config PKGS_DIR
string
option env=“PKGS_ROOT”
default “packages”
source “$RTT_DIR/Kconfig”
source “$PKGS_DIR/Kconfig”
source “board/Kconfig”
board/Kconfig
menu “Hardware Drivers Config”
config MCU_HC32L196
bool
select ARCH_ARM_CORTEX_M0
select RT_USING_COMPONENTS_INIT
select RT_USING_USER_MAIN
default y
menu “Onboard Peripheral Drivers”
endmenu
menu “On-chip Peripheral Drivers”
config BSP_USING_GPIO
bool “Enable GPIO”
select RT_USING_PIN
default y
menuconfig BSP_USING_UART
bool “Enable UART”
default y
select RT_USING_SERIAL
if BSP_USING_UART
config BSP_USING_UART0
bool “Enable UART0”
default y
config BSP_USING_UART1
bool “Enable UART1”
default n
endif
endmenu
menu “Board extended module Drivers”
endmenu
endmenu
其自动选择了几个必选的配置,比如RT_USING_USER_MAIN。另,定义了可配置的驱动选项,比如GPIO配置和串口配置。
上述文件对应的串口配置菜单如下:rtt官方文档中有对Kconfig进行详细讲解:https://www.rt-thread.org/document/site/#/development-tools/kconfig/kconfig
scons和工程模板文件
rt-thread使用scons作为构建系统,其用于编译源码,生成固件。不过呢,大家用的最多的,可能是用它生成keil工程,就是在使用menuconfig配置内核、组件和驱动之后,使用如下命令生成keil工程:
scons --target=mdk5
其原理,以生成keil5工程为例,是scons根据rtconfig.h文件中的配置,在template.uvprojx上添加宏定义、头文件路径配置、文件链接,从而生成project.uvprojx。下图左侧为模板工程,右侧为生成的rtt工程。再多说一句,rtt是如何能够读写keil工程文件呢?.uvprojx其实是xml文件,rtt通过模板工程创建新工程,就是在读写xml,有兴趣的话,可以阅读rt-thread源码根目录下的tools/keil.py。
rtconfig.h是在Kconfig系统中生成,只要修改好Kconfig相关文件后,无须操心rtconfig.h。要修改的是模板工程。不过也很简单,从其他bsp复制模板工程,修改设备类型,RAM和ROM配置就可以了。其他的配置,如下载接口等,可根据需要修改。稍复杂些的任务是修改下面三种文件:
SConstruct
rtconfig.py
SConscript
这三个文件都是python脚本,只不过它们里面调用了许多scons系统提供的函数。所以,如果熟悉python的话,修改起来会很轻松。
SConstruct
SConstruct是scons的入口脚本,其通过rtconfig.py以导入各种编译配置,之后调用PrepareBuilding以获取编译对象(要编译哪些文件)。PrepareBuilding会调用各SConscript脚本以获取编译对象。这文件一般不用修改,除非参考的bsp有瑕疵。
rtconfig.py
rtconfig.py中定义了各种与编译相关的选项和参数。
头部定义CPU架构与型号,还记得文首提到的架构移植吗?对于rtt已支持的CPU架构,只需要在这里指明即可,scons系统会根据这里的配置选择相应的架构代码以进行编译链接。
ARCH=‘arm’
CPU=‘cortex-m0’
其他主要的是编译参数,比如armcc编译系列如下。
elif PLATFORM == ‘armcc’:
# toolchains
CC = ‘armcc’
CXX = ‘armcc’
AS = ‘armasm’
AR = ‘armar’
LINK = ‘armlink’
TARGET_EXT = ‘axf’
DEVICE = ‘ --cpu Cortex-M0 ’
CFLAGS = ‘-c ’ + DEVICE + ‘ --apcs=interwork --c99’
AFLAGS = DEVICE + ‘ --apcs=interwork ’
LFLAGS = DEVICE + ‘ --scatter “boardlinker_scriptslink.sct” --info sizes --info totals --info unused --info veneers --list rt-thread.map --strict’
CFLAGS += ‘ -I’ + EXEC_PATH + ‘/ARM/ARMCC/include’
LFLAGS += ‘ --libpath=’ + EXEC_PATH + ‘/ARM/ARMCC/lib’
CFLAGS += ‘ -D__MICROLIB ’
AFLAGS += ‘ --pd “__MICROLIB SETA 1” ’
LFLAGS += ‘ --library_type=microlib ’
EXEC_PATH += ‘/ARM/ARMCC/bin/’
if BUILD == ‘debug’:
CFLAGS += ‘ -g -O0’
AFLAGS += ‘ -g’
else:
CFLAGS += ‘ -O2’
CXXFLAGS = CFLAGS
POST_ACTION = ‘fromelf --bin $TARGET --output rtthread.bin
fromelf -z $TARGET’
这块与生成keil工程无关,而是在命令行下编译源码并生成固件。可能大家平时不会这么编译,都是用Keil。其实这种方法意义重大,其是持续集成的基础。
适配起来很也简单,直接把相同CPU的配置复制过来即可。我移植HC32L196,虽然主要参考HC32F4A0,然而HC32F4A0的构架是cortex-m4,显然不适合。所以在适配rtconfig.py时,我从stm32stm32l053-st-nucleo获取cortex-m0的配置。
SConscript
SConscript存在于各源码目录下,用于决定编译哪些文件。这些要编译的文件也会在创建keil工程中时被包含进去。 bsp根目录下的SConscript用于扫描出子目录中的SConscript并调用之,一般不用修改。
bsp根目录下的SConscript用于扫描出子目录中的SConscript并调用之,一般不用修改。
子目录下的SConscript大致分为两种:
将指定文件包含到编译目标之中,或者使用Glob(‘*.c’)包含所有的C文件。
根据rtconfig.h中的配置来包含被选中的文件。
application中的为第1种,drivers为第2种。修改时依葫芦画瓢即可。
更多细节,可参阅:https://www.rt-thread.org/document/site/#/development-tools/scons/scons
board
终于进入代码讲解环节。board目录中通常会有一个board.c。
void rt_hw_board_clock_init(void)
{
}
void SysTick_Configuration(void)
{
}
void SysTick_Handler(void)
{
/* enter interrupt */
rt_interrupt_enter();
rt_tick_increase();
/* leave interrupt */
rt_interrupt_leave();
}
void rt_hw_board_init()
{
/* Configure the System clock */
rt_hw_board_clock_init();
/* Configure the SysTick */
SysTick_Configuration();
#ifdef RT_USING_HEAP
rt_system_heap_init((void *)HEAP_BEGIN, (void *)HEAP_END);
#endif#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif#ifdef RT_USING_CONSOLE
rt_console_set_device(RT_CONSOLE_DEVICE_NAME);
#endif
}
其做了如下事情:
初始化时钟
配置SysTick定时器
初始化rtt堆内存模块
初始化板级驱动,如gpio和uart
设计控制台串口
所有bsp的board.c都差不多,上面代码中rt_hw_board_clock_init和SysTick_Configuration空着,这就是移植时需要修改的代码。其他部分,一般不用修改。
另,配置堆内存时用到的宏定义在board.h之中,需要根据硬件做修改。
#define SRAM_BASE 0x20000000#define SRAM_SIZE 0x8000#define SRAM_END (SRAM_BASE + SRAM_SIZE)
boardlinker_scripts目录中存放链接脚本,需要修改其中有关RAM和ROM的配置。
link.sct:keil链接脚本
link.lds:gcc链接脚本
没做iar支持,因为我不用iar,也没装iar:)
Libraries
Libraries存放芯片厂商提供的驱动代码。我移植的HC32L196基本结构如下:
HC32L196_StdPeriph_Driver:分inc和src,存放芯片驱动,如hc32l196_adc.h和hc32l196_adc.c。
CMSISInclude:存放CMSIS相关头文件,如core_cm0.h
CMSISDeviceHDSCHC32L196Include:杂类驱动头文件。
CMSISDeviceHDSCHC32L196Source:杂类驱动源文件,比如system_hc32l19x.c,其内包含汇编启动文件会调用的SystemInit函数。
CMSISDeviceHDSCHC32L196SourceARM:keil汇编启动文件startup_hc32l19x.s
CMSISDeviceHDSCHC32L196SourceGCC:gcc汇编启动文件startup_hc32l19x.s
CMSISDeviceHDSCHC32L196SourceIAR:iar汇编启动文件startup_hc32l19x.s
SConscript:包含本目录中的代码文件。在包含汇编启动文件时,根据rtconfig.CROSS_TOOL来包含相应编译平台的文件。
上述这些文件,除了SConscript,都来自芯片厂商的SDK,只不过其文件分布可能与上述不同。视具体情况做调整即可。
汇编启动文件
关于Libraries中的汇编启动文件,需要补充说明一点。对于keil版本,一般无须修改。对于gcc版本,需要把跳转main函数的语句修改为跳转entry函数。
stm32的启动文件,其调用的是main函数。需要改为:
bl entry
之所以有如此差异,是因为armcc(keil编译器)与gcc的机制不同。
armcc
armcc的汇编启动文件相对简单,职责如下:
定义堆空间和栈空间,初始化栈指针
定义中断向量表
定义入口函数Reset_Handler,其先调用SystemInit,之后调用__main
初始化全局变量等工作放在了__main之中,__main完成初始化操作后会调用main函数。不过呢,armcc提供了一种函数补丁机制。如果定义了$Sub$$main函数的话,在main函数调用之前,会先调用$Sub$$main。rt-thread就是通过定义$Sub$$main函数,在其中进行操作系统的初始化,之后调用applications中的main函数以执行用户代码。
gcc
gcc汇编启动文件职责如下:
定义中断向量表
定义入口函数Reset_Handler,其负责初始化全局变量(data和bss),调用SystemInit,调用main函数
由于gcc没有armcc那样的函数补丁机制,所以要运行rt-thread的话,需要将调用main函数改为调用rt-thread入口函数,即entry。
rt-thread根据编译平台定义了不同的入口函数,armcc对应$Sub$$main,gcc对应entry。
#ifdef __ARMCC_VERSIONextern int $Super$$main(void);
/* re-define main function */int $Sub$$main(void)
{
rtthread_startup();
return 0;
}
#elif defined(__ICCARM__)extern int main(void);
/* __low_level_init will auto called by IAR cstartup */extern void __iar_data_init3(void);
int __low_level_init(void)
{
// call IAR table copy function.
__iar_data_init3();
rtthread_startup();
return 0;
}
#elif defined(__GNUC__)/* Add -eentry to arm-none-eabi-gcc argument */int entry(void)
{
rtthread_startup();
return 0;
}
#endif
移植到HC32L196
如前所说,我不打算详细讲解每一步操作,仅提一些要点。
移植步骤
可分为两步:
创建可以运行的bsp,这是最关键的一步。
填充rtt设备驱动,如gpio和uart,这是相对费时的一步。
之所以分为两大步,是因为先完成关键的一步,运行成功,将给予移植者一个很大的激励,提高信心。如果第一步失败了,也好及时查找问题,而不是等经历了漫长的设备驱动移植后,在测试时发现rt-thread系统都还无法跑起来。
创建可以运行的bsp
所谓可以运行,是指可以让rt-thread操作系统在芯片上跑起来,并不需要跑finsh控制台,甚至不需要点亮LED灯,不需要任何外设驱动,能运行如下代码就行。
main.c
int main(void)
{
for (uint32_t i = 0; ; i++)
{
rt_thread_delay(RT_TICK_PER_SECOND);
};
}
当然啦,没有任何外设驱动的话,只能在调试模式下运行才能观察效果。只要rt_thread_delay的功能正常,就说明rt-thread调度系统正常工作了。
在了解了移植原理后,创建可以运行的bsp应该能较快完成,具体步骤如下:
复制一个bsp,将名称改为自己的平台。
使用芯片原厂提供的SDK替换Libraries目录中的内容。对其中的汇编启动文件和链接脚本要稍加关注,尤其是gcc汇编。
修改board目录源码,主要是board.c,完成初始化时钟和SysTick的工作。
删除drivers中的文件,或者保留几个驱动文件的框架,删除硬件相关代码。
修改模板工程。
修改Kconfig相关文件。
修改Scons相关文件。
使用menuconfig更新rtconfig.h文件。
使用scons生成rt-thread工程。10.编译烧录调度。
RT-Thread Studio
创建可以运行的bsp之后,之后就是开发驱动程序了。此时其实是可以使用RT-Thread Studio开发的,其有一个非常好用的功能:导入Keil或者IAR项目到工作空间中。我在之后的驱动开发环节一直使用RT-Thread Studio编写代码。
gpio映射表
struct rt_pin_ops
{
void (*pin_mode)(struct rt_device *device, rt_base_t pin, rt_base_t mode);
void (*pin_write)(struct rt_device *device, rt_base_t pin, rt_base_t value);
int (*pin_read)(struct rt_device *device, rt_base_t pin);
rt_err_t (*pin_attach_irq)(struct rt_device *device, rt_int32_t pin,
rt_uint32_t mode, void (*hdr)(void *args), void *args);
rt_err_t (*pin_detach_irq)(struct rt_device *device, rt_int32_t pin);
rt_err_t (*pin_irq_enable)(struct rt_device *device, rt_base_t pin, rt_uint32_t enabled);
rt_base_t (*pin_get)(const char *name);
};
rt-thread gpio设备驱动接口使用引脚号(pin)来操作指定的引脚。早期的bsp会定义一个大数组来存储引脚列表,下图是swm320定义的列表。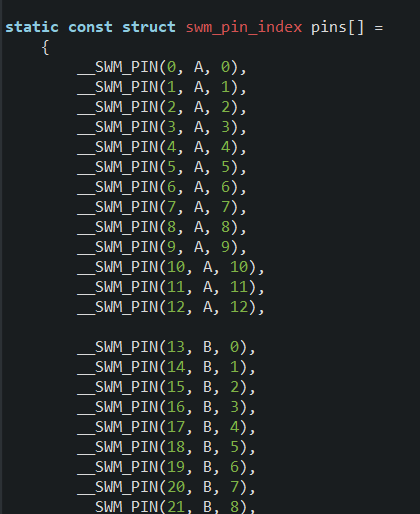 这种方式比较繁琐。通常芯片的GPIO口有一定的规律,比如PA0-PA15,PB0-PB15,PC0-PC15,等等。这些GPIO对应的寄存器的地址是连续的,可以通过一个公式将寄存器地址转换为引脚序号,反之亦然。
这种方式比较繁琐。通常芯片的GPIO口有一定的规律,比如PA0-PA15,PB0-PB15,PC0-PC15,等等。这些GPIO对应的寄存器的地址是连续的,可以通过一个公式将寄存器地址转换为引脚序号,反之亦然。
因此出现了使用GET_PIN宏来计算指定GPIO引脚序号的方法,比如GET_PIN(A, 5)会计算出PA5引脚的序号。可能stm32 bsp最先使用这种方法,大家移植的时候可以参考一下。
支持gcc
支持编译
HC32L196的原厂SDK中并不支持gcc。不过笔者是eclipse系列IDE的忠实用户,既然原厂不支持,那我就自己支持吧。
首先,要创建汇编启动文件:LibrariesCMSISDeviceHDSCHC32L196SourceGCCstartup_hc32l19x.s。
怎么创建呢,当然不需要从零开始啦。从其他cortex-m0的bsp中复制一个来修改。比如stm32的,
bspstm32librariesSTM32L0xx_HALCMSISDeviceSTSTM32L0xxSourceTemplatesgccstartup_stm32l053xx.s
修改中断向量表和中断函数即可。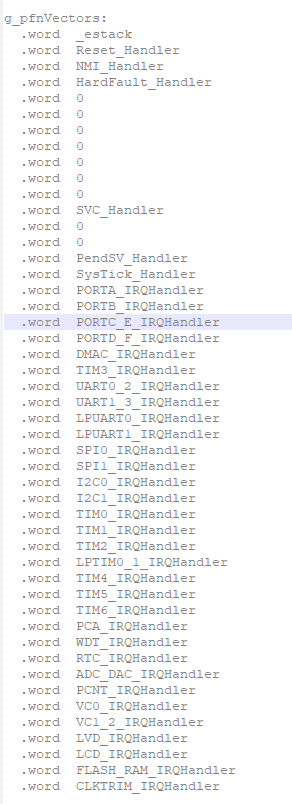
另外要关注下rtconfig.py和boardlinker_scriptslink.lds,同样可以参考cortex-m0的bsp。
支持烧录
添加了对gcc的支持后,使用RT-Thread Studio创建开发板支持包,就可以真正使用RT-Thread Studio来开发项目了。不过在这之前,需要先编译出固件并烧录验证。
使用scons命令编译。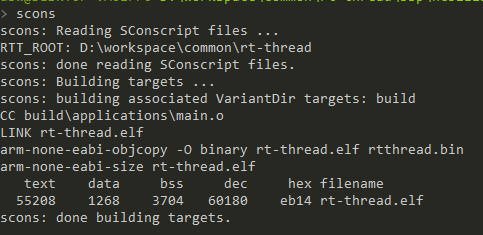 编译后的固件位于bsp根目录:
编译后的固件位于bsp根目录: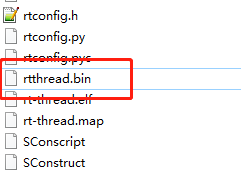
可使用J-Flash烧录: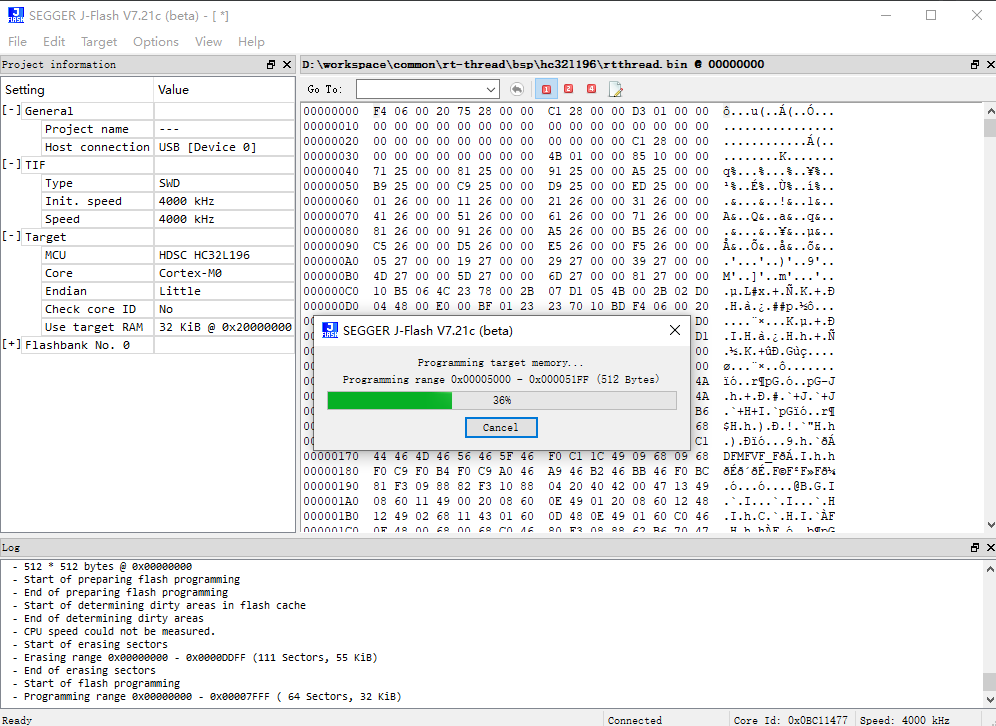 成功运行:
成功运行: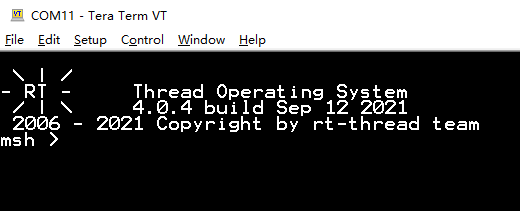 大家在使用J-Flash创建工程时,可能发现找不到自己的硬件配置。如下图,HC32系列只有我移植的HC32L196,而没有HC32F4A0等,这是我自己添加进去的。怎么添加呢,可参考我之前的一篇文章:RT-Thread Studio烧写国产mcu(swm320)固件的方法。
大家在使用J-Flash创建工程时,可能发现找不到自己的硬件配置。如下图,HC32系列只有我移植的HC32L196,而没有HC32F4A0等,这是我自己添加进去的。怎么添加呢,可参考我之前的一篇文章:RT-Thread Studio烧写国产mcu(swm320)固件的方法。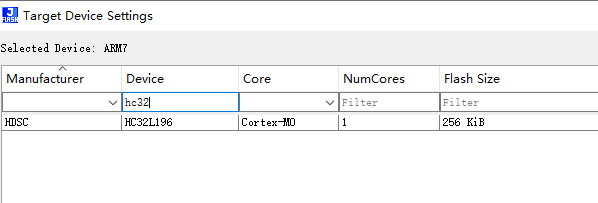
后记
本次移植过程相当漫长,不是因为移植任务本身艰难,而是我只能用碎片化的时间进行移植。有几天我九点半准备下班回家移植,老板觉得走的太早,硬是拖到十点,这些天就没有早于十一点到家的。大家说这样的老板是不是很可恶?表示赞同的,支持下笔者,点个再看呗:)。
责任编辑:haq
-
芯片
+关注
关注
455文章
50835浏览量
423830 -
mcu
+关注
关注
146文章
17154浏览量
351269 -
RTThread
+关注
关注
8文章
132浏览量
40884
原文标题:移植RT-Thread到国产芯片HC32L196,原理与方法详解!
文章出处:【微信号:RTThread,微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
RT-Thread上CAN实践

开源共生 商业共赢 | RT-Thread 2024开发者大会报名启动!
2024 RT-Thread全球巡回 线下培训火热来袭!
RT-Thread 新里程碑达成——GitHub Star 破万!
6月6日杭州站RT-Thread线下workshop,探索RT-Thread混合部署新模式!
2024 RT-Thread 全球技术大会演讲议程发布!
RT-Thread混合部署Workshop北京站来啦!
4月25日北京站RT-Thread线下workshop,探索RT-Thread混合部署新模式
4月10日深圳场RT-Thread线下workshop,探索RT-Thread混合部署新模式!

4月10日深圳场RT-Thread线下workshop,探索RT-Thread混合部署新模式!
恩智浦半导体正式加入RT-Thread全球合作伙伴计划!
《RT-Thread设备驱动开发指南》基础篇--以先楫bsp的hwtimer设备为例

RT-Thread设备驱动开发指南基础篇—以先楫bsp的hwtimer设备为例






 工商网监
工商网监
评论