 Verilog HDL-同步技术你了解多少
Verilog HDL-同步技术你了解多少
同步技术
在芯片设计中,数据同步和在不同时钟域之间进行数据传输会经常出现。为避免任何差错、系统故障和数据破坏,正确的同步和数据传输就显得格外重要。这些问题的出现往往比较隐蔽,不易被发现,因此正确进行跨时钟域处理就显得极为重要。实现数据同步有许多种方式,在不同的情况下进行恰当的同步方式选择非常重要。以计算机中的南桥芯片为例,它通过不同的接口(如PCIe USB 吉比特以太网等)与外部设备相连。南桥通过不同的接口与外围设备相连,它与北桥之间是一个通用数据接口。南桥芯片中需要使用数据同步技术,目前,常用的同步技术主要分为以下几类:
- 在不同的时钟域之间使用FIFO
- 在不同的时钟域之间使用握手信号
- 相位差固定的同步域内部的数据传输
- 准同步域之间的数据传输
使用FIFO进行的数据同步
当存在两个异步时钟域并且二者之间进行数据包传输时,双端口FIFO最为适合。FIFO有两个端口,一个端口写入输入数据,另一个端口读出数据,如图6.34所示。两个端口工作在相互独立的时钟域内,通过各自的指针(地址)来读写数据。由于每个端口工作在相互独立的时钟域内,因此读写操作可以独立实现并且不会出现任何差错。当FIFO变满时,应停止写操作,直到FIFO中出现空闲空间。同样,当FIFO为空时,应停止读操作,直到有新的数据被写入FIFO中。
握手同步方式
FIFO可用于在不同的时钟域之间进行数据包的传输,但是在一些应用中需要在不同时钟域之间进行少量数据传输。FIFO占用的硬件资源较大,此时可以考虑使用握手同步机制.
所谓握手,即通信双方使用了专用控制信号进行状态指示,这个控制信号既有发送域给接受域的也有接收域给控制域的,有别于单向控制信号方式。
使用握手协议方式处理跨时钟域数据传输时,只需要对双方的握手信号(req 和 ack)分别使用脉冲检测方法进行同步,在具体实现中,假设req ,ack, data,总线在初始化时都处于无效状态,发送域先把数据放入总线,随后发送有效的req信号给接收域;接收域在检测到有效的req信号后锁存数据总线,然后会送一个有效的ack信号表示读取完成应答;发送域在检测到有效ack信号后撤销当前的req信号,接收域在检测到req撤销后也相应撤销ack信号,此时完成一次正常握手通信,此后,发送域可以继续开始下一次握手通信,如此循环,该方式能够使接收到的数据稳定可靠,有效的避免了亚稳态的出现,但是控制信号握手检测会消耗通信双方较多的时间。

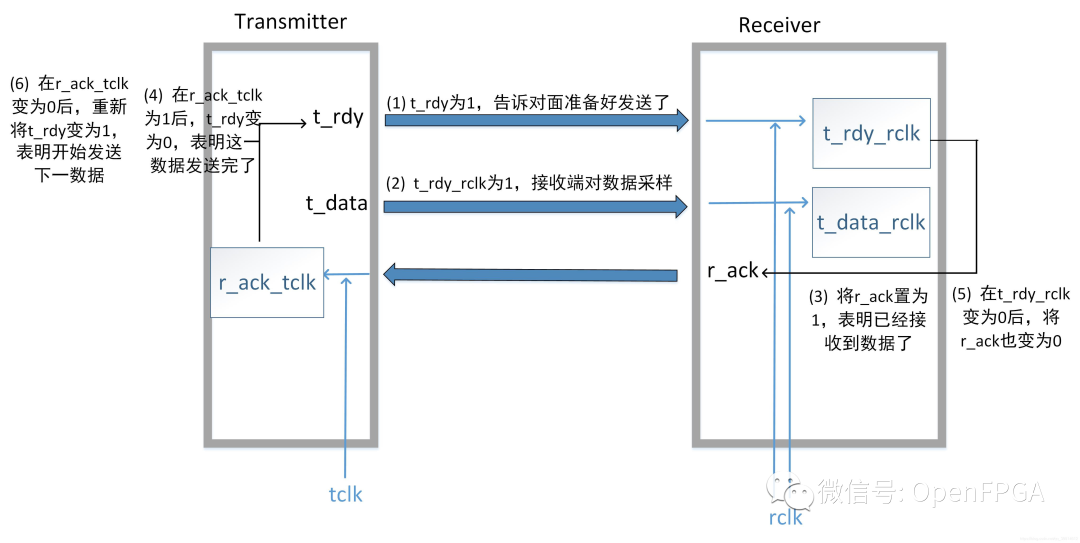
以下是握手同步机制的工作步骤:
-
用后缀_t表示发送端,用后缀_r表示接收端。发送时钟用tclk表示,接收时钟用rclk表示。数据从tclk域向rclk域传输;
-
当需要发送的数据准备好后,发送端将t_rdy信号置为有效,该信号必须在tclk下降沿时釆样输出;
-
在t_rdy有效期间,t_data必须保持稳定;
-
接收端在rclk域中采用双同步器同步t_rdy控制信号,并把同步后的信号命名为t_rdy_rclk;
-
接收端在发现t_rdy_rclk信号有效时,tdata已经安全地进入了rclk域,使用rclk对其进行采样,可以得到t_data_rclk。由于由于数据已经在rclk域进行了正确采样,所以此后在rclk域使用该数据是安全的;
-
接收端将r_ack信号置位1,信号必须在rclk下降沿输出;
-
发送端通过双同步器在tclk域内同步r_ack信号,同步后的信号称为r_ack_tclk;
-
以上所有步骤称为半握手。tclk1,这是因为发送端在输出下一数据之前,不会等r_ack_tclk被置为0;
-
半握手机制工作速度快,但是,使用半握手机制时需要谨慎,一旦使用不当,会导致操作错误;
-
从低频时钟域向高频时钟域传输数据时,半握手机制较为适用,这是由于接收端可以更快地完成操作。然而,如果从高频时钟域向低频时钟域传输数据,则需要采用全握手机制;
-
当r_ack_tclk为高电平时,发送端将t_rdy置为0;
-
当t_rdy_rclk为低电平时,接收端将r_ack置为0;
-
当发送端发现r_ack_tclk为低电平后,全握手过程结束,传输端可以发送新的数据;
-
显然,全握手过程耗时较长,数据传输速度较慢。然而,全握手机制稳定可靠,可以在两个任意频率的时钟域内安全地进行数据传输。如图6.35所示为全握手机制工作波形。
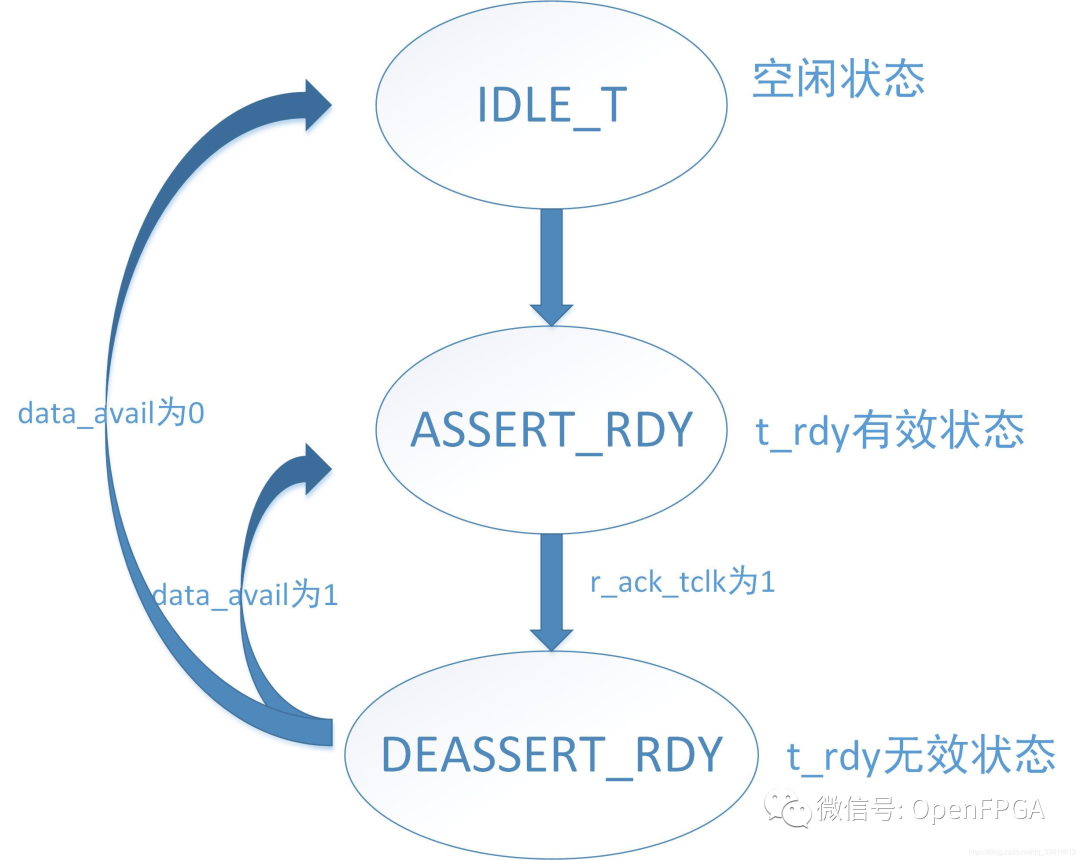
上面过程比较绕口,因此我制作了一张流程图,如下所示:
全握手机制代码及仿真结果如下。
发送端:使用三个状态的状态机,其跳转关系如下:
moduletransmit(tclk,reset_tclk,t_rdy,data_avail,transmit_data,t_data,r_ack);
inputtclk;
inputreset_tclk;
inputdata_avail;
input[31:0]transmit_data;
inputr_ack;
outputt_rdy;
outputt_data;
localparamIDLE_T=2'd0,
ASSERT_T_RDY=2'd1,
DEASSERT_T_RDY=2'd2;
reg[1:0]t_hndshk_state,t_hndshk_state_nxt;
regt_rdy,t_rdy_nxt;
reg[31:0]t_data,t_data_nxt;
regr_ack_tclk;
always@(*)begin
t_hndshk_state_nxt=t_hndshk_state;
t_rdy_nxt=1'b0;
t_data_nxt=t_data;
case(t_hndshk_state)
IDLE_T:begin
if(data_avail)begin
t_rdy_nxt=1'b1;
t_hndshk_state_nxt=ASSERT_T_RDY;
t_data_nxt=transmit_data;
end
end
ASSERT_T_RDY:begin
if(r_ack_tclk)begin
t_rdy_nxt=1'b0;
t_hndshk_state_nxt=DEASSERT_T_RDY;
t_data_nxt='d0;
end
elsebegin
t_rdy_nxt=1'b1;
t_data_nxt=transmit_data;
end
end
DEASSERT_T_RDY:begin
if(!r_ack_tclk)begin
if(data_avail)begin
t_rdy_nxt=1'b1;
t_hndshk_state_nxt=ASSERT_T_RDY;
t_data_nxt=transmit_data;
end
elsebegin
t_hndshk_state_nxt=IDLE_T;
end
end
end
endcase
end
always@(posedgetclkornegedgereset_tclk)begin
if(!reset_tclk)begin
t_rdy<= 1'b0;
t_hndshk_state<= IDLE_T;
t_data <= 32'h00000000;
r_ack_tclk<= 1'b0;
end
elsebegin
t_rdy<= t_rdy_nxt;
t_hndshk_state <= t_hndshk_state_nxt;
t_data <= t_data_nxt;
r_ack_tclk <= r_ack;
end
end
endmodule
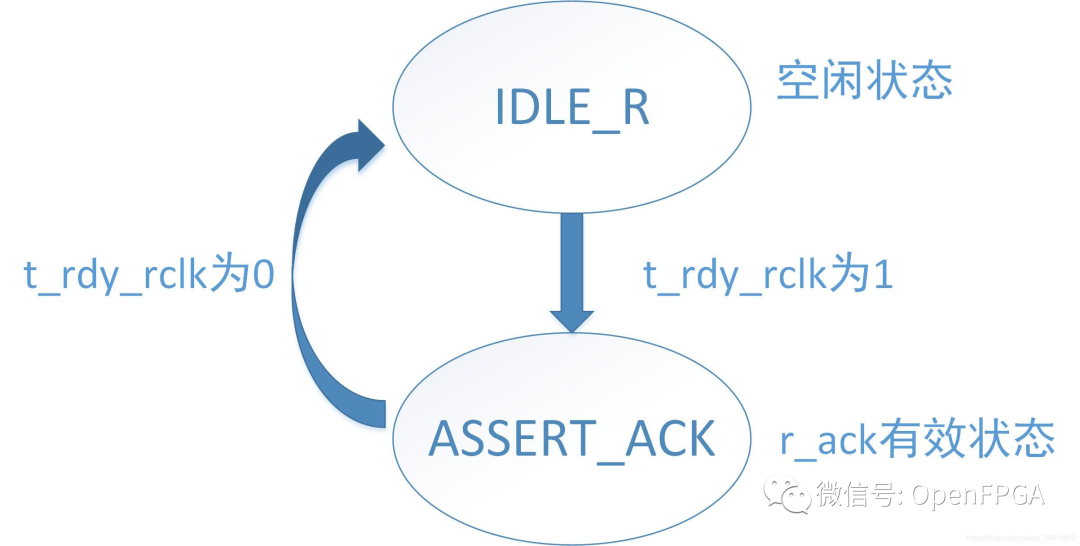
接收端:使用两个状态的状态机,跳转关系如下:
modulereceiver(rclk,reset_rclk,t_rdy,t_data,r_ack);
inputrclk,reset_rclk;
inputt_rdy;
input[31:0]t_data;
outputr_ack;
regr_hndshk_state,r_hndshk_state_nxt;
regt_rdy_rclk;
reg[31:0]t_data_rclk,t_data_rclk_nxt;
regr_ack,r_ack_nxt;
localparamIDLE_R=1'b0,
ASSERT_ACK=1'b1;
always@(*)begin
r_hndshk_state_nxt=r_hndshk_state;
r_ack_nxt=1'b0;
t_data_rclk_nxt=t_data_rclk;
case(r_hndshk_state)
IDLE_R:begin
if(t_rdy_rclk)begin
r_hndshk_state_nxt=ASSERT_ACK;
t_data_rclk_nxt=t_data;
r_ack_nxt=1'b1;
end
end
ASSERT_ACK:begin
if(!t_rdy_rclk)begin
r_hndshk_state_nxt=IDLE_R;
r_ack_nxt=1'b0;
end
elsebegin
r_ack_nxt=1'b1;
end
end
endcase
end
always@(posedgerclkornegedgereset_rclk)begin
if(!reset_rclk)begin
r_hndshk_state<= IDLE_R;
t_data_rclk <= 1'b0;
t_rdy_rclk<= 1'b0;
r_ack<= 1'b0;
end
elsebegin
r_hndshk_state<= r_hndshk_state_nxt;
t_data_rclk <= t_data_rclk_nxt;
t_rdy_rclk <= t_rdy;
r_ack <= r_ack_nxt;
end
end
endmodule
测试代码
`timescale1ns/1ns
moduletestbench;
regtclk_tb,rclk_tb;
reg[31:0]transmit_data_tb;
regreset_tclk_tb,reset_rclk_tb;
regdata_avail_tb;
wiret_rdy_tb;
wire[31:0]t_data_tb;
wirer_ack_tb;
parameterCLK_HALF_PERIOD1=5;
parameterCLK_HALF_PERIOD2=8;
parameterRESET_DELAY=100;
initialbegin
tclk_tb=0;
rclk_tb=0;
end
always#CLK_HALF_PERIOD1tclk_tb=~tclk_tb;
always#CLK_HALF_PERIOD2rclk_tb=~rclk_tb;
initialbegin
reset_rclk_tb=0;
reset_tclk_tb=0;
#RESET_DELAYreset_rclk_tb=1;
reset_tclk_tb=1;
end
initialbegin
#500;
data_avail_tb=1;
transmit_data_tb=32'h96431346;
end
transmittransmit_test
(.tclk(tclk_tb),
.reset_tclk(reset_tclk_tb),
.t_rdy(t_rdy_tb),
.data_avail(data_avail_tb),
.transmit_data(transmit_data_tb),
.t_data(t_data_tb),
.r_ack(r_ack_tb));
receiverreceiver_test
(.rclk(rclk_tb),
.reset_rclk(reset_rclk_tb),
.t_rdy(t_rdy_tb),
.t_data(t_data_tb),
.r_ack(r_ack_tb));
endmodule
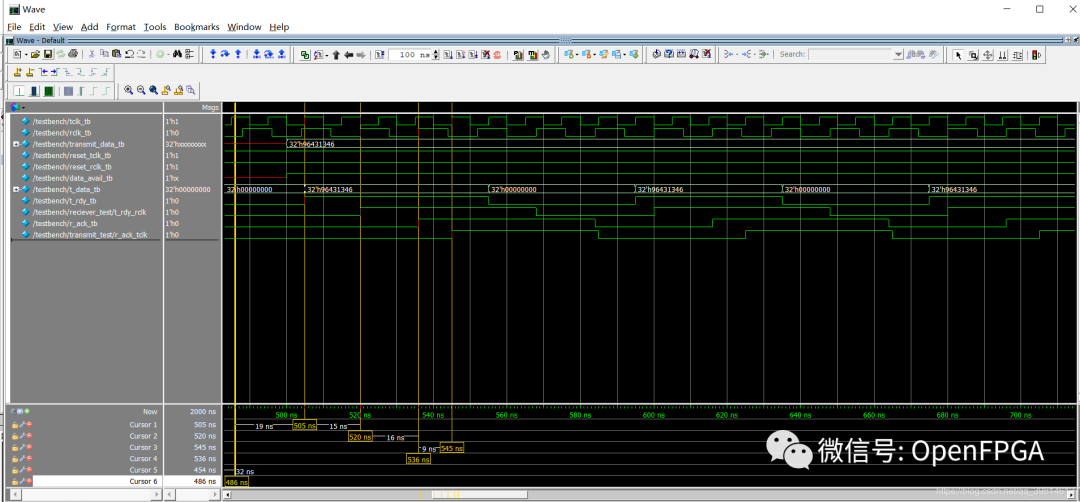
仿真结果
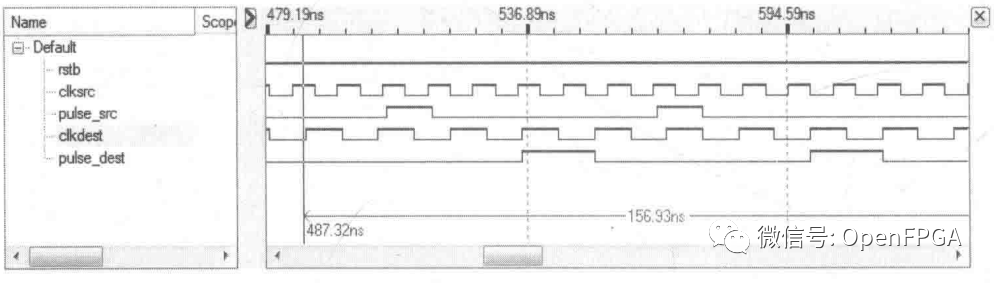
脉冲同步器
脉冲同步器在源时钟域内接收一个脉冲,在目的时钟域内产生一个脉冲。脉冲同步器内部通常采用全握手机制来产生输出脉冲。在讨论脉冲同步器工作原理之前,我们先讨论它的用途。有时状态机希望更新不同时钟域内寄存器的数值,它可以采用全握手同步机制来达到这一目的,但全握手同步机制存在同步延迟大的问题,在全握手完成之前,状态机都将处于等待对方响应的状态。
为了解决这一问题,可以引入脉冲同步器电路。引入脉冲同步器后,状态机在源时钟域内产生更新脉冲,此后继续执行其他操作。脉冲同步器可以接收脉冲并完成剩余的同步和输出脉冲产生工作。需要注意的是,脉冲同步器完成全握手操作需要消耗多个时钟周期,因此状态机发出的两个脉冲之间需要足够的时间间隔,否则就会出现逻辑错误。下面是脉冲同步器的工作步骤、Verilog代码及仿真结果。
步骤:
-
当源脉冲(pulse_src)有效时,在源时钟域中生成一个信号,并且保持有效(该信号称为sig_stretched);
-
使用同步器在目的时钟域中对sig_stretched信号进行同步,称为sig_stretched_dest;
-
sig_stretched_dest信号被送回到源时钟域并进行同步称为sig_stretched_ack;
-
如果sig_stretched_ack=1,则产生一个脉冲,根据这一反馈脉冲来将sig_stretched置为0(完成全握手);
-
基于sig_stretched_dest,在目的时钟域中产生一个脉冲称为pulse_dest。
modulepulse_synchronizer
(clksrc,
resetb_clksrc,
clkdest,
resetb_clkdest,
pulse_src,
pulse_dest);
//*******************************************************
inputclksrc;
inputresetb_clksrc;
inputclkdest;
inputresetb_clkdest;
inputpulse_src;//pulseinsourceclockdomain
outputpulse_dest;//pulseindestinationclockdomain
regsig_stretched;
wiresig_stretched_nxt;
regsig_stretched_syncl,sig_stretched_dest;
regsig_stretched_dest_dl;
regsig_stxetched_ack_pre,sig_stretched_ack,
regsig_stretched_ack_d1;
wiresig_stretched_ack_edge;
wirepulse_dest;
assignsig_stretched_nxt=sig_stretched_ack_edge?1'b0:(pulse_src?l'bl:sig_stretched);
always@(posedgeclksrcornegedgeresetb_clksrc)
begin
if(!resetb_clksrc)
sig_stretched<= 1'bO;
else
sig_stretched<= sig_stretched_nxt;
end
//First two flops for synchronizing and the third one for pulse generation
always @(posedge clkdest or negedge resetb_clkdcst)
begin
if (!resetb_clkdest)
begin
sig_stretched_sync <= 1'b0;
sig_stretchcd_dest<= 1'b0;
sig_stretched_dest_d1<= 1'b0;
end
else
begin
sig_stretchcd_sync1<= sig_stretched;
sig_stretched_dest <= sig_stretched_sync1;
sig_stretched_dest_d1 <= sig_stretched_dest;
end
end
// First two flops are forsynchronizingbacktosourceclockdomain.
//thirdflopisforedgedetection
always@(posedgeclksrcornegedgeresetb_clksrc)
begin
if(!resetb_clksrc)
begin
sig_strctched_ack_pre<= 1'b0;
sig_stretchecl_ack<= 1'b0;
sig_stretched_ack_d1<= 1'b0;
end
else
begin
sig_stretched_ack_pre<= sig_stretched_dest;
sig_stretched_ack <= sig_stretched_ack_pre;
sig_stretchcd_ack_d1 <= sig_strctched_ack;
end
end
assign sig_stretched_ack_edge = sig_stretched_ack & !sig_stretched_ack_d1;
// Pulse generation in destination clock domain
assign pulse_dest = sig_stretched_dest & !sig_stxctched_dest_d1;
endmodule
相位、频率关系固定时的跨时钟域数据传输
如果两个时钟具有相同或者整数倍的频率关系,上升沿之间有固定、明确的相位关系,那么在不使用FIFO或者握手协议的情况下,可以进行数据传输。此时固定明确的相位关系非常重要,数据传递时的建立时间和保持时间必须满足要求,如果相位关系不固定、不明确,则无法采用这种机制进行跨时钟域数据传递。在系统复位之后,需要调整数据延迟值(使用延迟链电路),从而确保跨时钟域数据传递时可以进行正确采样。
这种机制与使用FIFO或者握手机制相比具有更小的延迟。例如,DDR数据总线上可以使用单倍的时钟实现双倍的数据传输。前面讲过的数据位宽调整电路,也要求双方的时钟频率和相位具有间定、明确的关系。
准同步时钟域
如果两个时钟具有相同的标称频率和指定范围内的时钟精度误差,那么我们说这两个时钟源是准同步的。在实际应用中,通常数据发送端的本地时钟和接收端的本地时钟是独立产生的,通常都使用晶体振荡器这类高精度时钟源,二者往往具有相同的标称值和规定范围内的精度误差。
例如,PCIe要求发送和接收时钟误差在300ppm以内。这就意味着在一个相对较长的时间里(例如,对PCIe来说,超过1300个时钟周期),两个时钟将产生1个时钟周期的偏差。下面我们将讨论此时如何进行数据传输同步。
PCIe,SATA等串行通信协议中广泛使用了准同步通信机制。在数据收发电路中,弹性缓冲区(FIFO)被用于进行跨时钟域数据传输。此时FIFO不仅用于跨时钟域的同步,还需要与一定的外部电路配合,解决长时间通信时,由于时钟偏差造成的FIFO内部数据上溢或下溢的问题。PCIe和SATA要求发送端周期性地将null字符插入传输数据流中;在接收端,根据FIFO内部的数据深度,这些null字符会被丢弃或添加到FIFO中。
-
usb
+关注
关注
60文章
7933浏览量
264409 -
fifo
+关注
关注
3文章
387浏览量
43635 -
Verilog
+关注
关注
28文章
1351浏览量
110066 -
HDL
+关注
关注
8文章
327浏览量
47369
原文标题:Verilog HDL-同步技术
文章出处:【微信号:Open_FPGA,微信公众号:OpenFPGA】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
Verilog 与 ASIC 设计的关系 Verilog 代码优化技巧
Verilog与VHDL的比较 Verilog HDL编程技巧
数字系统设计与Verilog HDL
Verilog硬件描述语言参考手册
Verilog HDL的基础知识
FPGA Verilog HDL代码如何debug?
FPGA Verilog HDL有什么奇技巧?
FPGA verilog HDL实现中值滤波
FPGA设计中 Verilog HDL实现基本的图像滤波处理仿真
有什么好用的verilog HDL编辑工具可用?
verilog调用模块端口对应方式
verilog同步和异步的区别 verilog阻塞赋值和非阻塞赋值的区别
通过HDL制作了一个4位计数组件VERILOG ,如何设置像这些标准组件这样的API?
例说Verilog HDL和VHDL区别






 工商网监
工商网监
评论