 如何用MDK来开发树莓Pico
如何用MDK来开发树莓Pico

【说在前面的话】
按照树莓派基金会的说法:
Raspberry Pi Pico is a tiny, fast, and versatile board built using RP2040, a brand new microcontroller chip designed by Raspberry Pi in the UK.
https://www.raspberrypi.org/products/raspberry-pi-pico/
树莓派 Pico是一个小巧、“迅速”且多功能的开发板,基于独家定制的RP2040芯片打造,是在英国的树莓派团队设计的全新微控制器。
以30RMB左右的价格来看,Pico作为一个开发板具有非常吸引人的特性:
搭载了设计最大频率为133MHz的双核Cortex-M0+
实际可以轻松超频到250MHz,甚至是400MHz
256K + 8K 的SRAM
由多个SRAM总线从机接口构成,从而保证了多总线主机访问时不易出现冲突的问题——双向八车道的高速,几乎不会堵车——吞吐量杠杠的
大量充满奇思妙想的外设(这里就不做赘述)
在开发环境上,Pico身为单片机,却有着Linux般豪华的富贵病——这么说吧,你要是没玩过cmake、gcc、没用过命令行、没搞过OpenOCD,你都不好意思说你是Pico的C玩家。
在Pico官方论坛上,曾经有一个带节奏的帖子叫做《Pi Pico - the most user un-friendly MCU?》(中文:树莓派Pico——对用户最不友好的MCU)?如果你可以看懂英文,建议去观摩下这个13页的热帖。其中你可以看到:
Pico-SDK团队开发者下场撕逼亲切的与各种暴躁老哥用户交流使用经验
Pico-SDK开发者谈Pico开发环境的设计思路,总结如下:
不会玩cmake的请学习cmake,用不了你多少时间
Windows我们也支持啊,你装个Linux模拟环境……
我们推荐所有用户都应该用树莓派4的Linux环境来开发Pico这个MCU
别人都玩得好好的,你玩不好一定是你不熟悉cmake
makefile玩家、IAR玩家、MDK玩家请自寻出路(“on your own”)
我们团队庙小,4美元的开发板你还要啥自行车?
……
然而,MCU的开发并不同于MPU的开发。我的观察中,树莓派这类能跑Linux的系统,基本上使用的是Linux生态,在这一生态下,很多工具比如cmake、命令行、GDB或者OpenOCD之类都是如空气和水一样自然的东西。然而,树莓派团队在处理Pico这类MCU时可能多少有点“屁股决定脑袋”了,仍然按照自己的习惯照搬了Linux的那套开发习惯到MCU环境中。
我经常说,抛开正态分布的中央主极大、用两端的个案来举反例,就是耍流氓。
对MCU开发环境来说,虽然也有不少人使用gcc、cmake之类的工具,但主体的大多数人还是以IDE等“一站式”开发工具为主体的。RP2040无论多么优秀,它本质上就是个装了两个Cortex-M0+的大号MCU,凭什么非要上Linux环境才能开发?
MDK虽然老旧、不支持多级工程管理、偶尔闪退、语法提示经常出错、被破解的爹妈都不认识……被人骂了那么多,但Cortex-M用MDK开发仍然是主流。但无奈,人家的孩子人家说了算,官方明确态度说暂时不支持Arm Compiler 6,也不支持用MDK这样的不带cmake支持的IDE,你也没办法啊。
好在Pico-SDK是一个基于BSD 3-Clause协议的开源项目;RP2040的数据手册写的也很清晰。官方说不支持,我们就自己来呗?于是就有了这个MDK专属的Pico-Template开源项目。
实际上:
Pico-Template 是目前世界上第一个用MDK配合Arm Compiler 6开发Pico的模板;
使用该模板你可以使用Pico-SDK来访问全部的外设
实际使用中 Pico-Template 具有以下特点:
支持Arm Compiler 6
可以使用RTE和Pack-Installer获得各类中间件软件包
配置栈和堆的大小更为简单
支持使用JLINK进行调试
默认搭载了perf_counter服务
一键切换不同的地址空间布局
在外部Flash里执行代码
在SRAM里执行代码(代码仍保存在外部Flash里)
在SRAM里调试
【裸机思维】对该开源项目提供持续的维护和更新
【Pico-Template的部署】
一个合格的工程模板,应该做到只要成功的下载到了本地,就能够立即使用——Pico-Template也是这样。因此,所谓的Pico-Template的部署,实际上有三种方式:它们主要围绕着如何处理Pico-Template所依赖的第三方仓库而有所区别。
第一种方式:使用git工具进行下载
1、新建一个目录,比如叫做 pico-mdk来保存模板,并进入该目录
mkdir pico-mdkcd pico-mdk
2、使用git工具clone模板到本地:
git clone https://github.com/GorgonMeducer/Pico_Template 。
3、将Pico-Template所依赖的其它仓库以submodule的形式更新到本地:
git submodule update --remote --init
至此,我们已经成功的将Pico-Template同步到了本地一个叫做pico-mdk的目录下。
第二种方式:手工下载压缩包
1、打开Pico-Template在Github上的Release页面,下载最新版本的压缩包。
https://github.com/GorgonMeducer/Pico_Template/releases
完成下载后,解压缩到本地。
2、打开Pico-SDK在Github上的Release页面,下载最新的压缩包:
https://github.com/raspberrypi/pico-sdk/releases
完成下载后,解压缩到本地。打开解压后的目录,应该看到类似下图的内容:
全选上述目录列表中的内容后,将它们拷贝到Pico-Template的pico-sdk目录内
3、打开perf_counter在github上的Release页面,下载最新的压缩包:
https://github.com/GorgonMeducer/perf_counter/releases
完成下载后,解压缩到本地。打开解压后的目录,应该看到类似下图的内容:
全选上述目录列表中的内容后,将它们拷贝到Pico-Template/project/mdk/perf_counter目录内:
至此,我们成功的完成了Pico-Template的合体工作。恭喜恭喜!
第三种方式:网盘见
如果你觉得上述方法都挺麻烦的,尤其是你无法稳定的访问Github,那么可以在订阅【裸机思维】公众号后发送关键字 “Pico”来获取网盘链接。下载成功后立即可以使用。
这一方法唯一的缺点是:我可能会忘记更新网盘上的压缩包。
【如何编译和下载】
当你获得了Pico-Template后,可以通过路径project/mdk找到工程文件:
双击后,就可以见到我们熟悉的界面:
单击编译,应该可以顺利的看到类似如下的结果:
可以看到,在工程目录下(project/mdk/) 生成了一个名为 template.uf2 的文件——这就是Pico专用的镜像文件:
此时,我们可以按住Pico上的白色按钮不放、将Pico的USB接口连接PC。当我们在文件管理器中发现一个新的叫做 PRI-RP2 的U盘时,说明Pico已经成功进入烧录准备状态。
将template.uf2拖放到U盘中即可。
如果一切顺利,可以看到Pico上的LED以大约0.5Hz的频率进行呼吸。
【如何配置栈和堆的大小】
一个实用的工程模板,最绕不开的问题之一就是:如何设置栈和堆的大小。Pico-Template提供了极其简单的方法。步骤如下:
1、打开Options for Target窗口,进入Linker选项卡:
单击图中红圈内选中的“Edit”按钮。
这里宏STACK_0_SIZE和HEAP_0_SIZE就是我们要配置的栈与堆的尺寸。请暂时无视其它宏的内容,也不要修改它们。
完成修改后,保存、重新编译即可。
【如何在SRAM中执行代码】
由于RP2040芯片并没有片内Flash,因此通常会像Pico那样使用外部Flash来保存程序。由于RP2040的XIP已经将外部Flash的内容映射到了Cortex-M0+的地址空间中(从0x10000000开始),因此可以直接在外部Flash上执行代码。众所周知,外部Flash是通过SPI或者QSPI来连接的,其速度肯定无法媲美芯片内部的Flash,因此即便 XIP有cache来提高速度,直接从0x1000-0000的地址上运行程序(或者是读取数据)显然存在性能上的瓶颈。为了解决这一问题,在SRAM富余的情况下(RP2040带了264KB的SRAM)对一些小的应用来说,完全允许用户直接在SRAM中执行代码。为了提供这一功能,Pico-Template贴心的提供了对应的工程配置:我们可以在下拉列表中直接一键切换:
这一操作的本质实际上是更换了对应的scatter-script脚本。所有用到的链接脚本都保存在工程目录下:
有兴趣的小伙伴可以自行把玩。
【如何使用MDK进行调试】
在众多的商业调试工具中,Segger 的J-Link很迅捷的就添加了对RP2040的调试支持,具体细节可以通过下面的网址来了解:
https://wiki.segger.com/Raspberry_Pi_Pico
Pico-Template默认已经选择J-Link作为调试工具。需要注意的是,并非所有的J-Link都能支持RP2040的调试,按照官方的说法,只有v9版本的J-Link硬件才有对应的功能。如果你手头正好有符合要求的J-Link,恭喜你,获得了完整的MDK体验——基本告别了手动拖放uf2文件,调试全靠LED的生活。
【elf2uf2转换工具】
最后,值得特别说明的是,在Pico_Template的tool目录下有一个我亲手定制过的elf2uf2.exe——增加了自动计算0x1000-0000地址开始的252个字节的CRC32校验码,并将校验结果追加其后的功能——如果不这么做,生成的uf2将无法通过stage2-boot的校验。
工程模板会在每次编译完成后执行 axf2uf2.bat,将生成的elf/axf文件转换成Pico可以直接使用的uf2文件,方便用户进行U盘拖放操作。
【说在后面的话】
说句实话,我挺喜欢树莓派Pico的——即便我对官方的“Pico官方只支持用cmake开发不然自己想办法”的态度有些许不满,但仍然架不住它的小巧和魅力。这个模板已经涵盖了除tinyUSB支持以外的几乎大部分功能,成功的将Pico以普通Cortex-M0+的身份拉回了国内大部分嵌入式工程师所熟悉的开发环境中。
最后的最后,我一定要把心里憋了很久的那句话吐出来:
就一个M0+而已,干嘛开发它我还要去用命令行、用Linux、学cmake?凭什么?
你们Linux玩家人均cmake、命令行、OpenOCD、GDB、gcc,所以就不管单片机玩家的死活了么?
跟我这儿玩啥凡尔赛?
老子就不想用cmake……你还不让我玩了?
就一个M0+而已,我就要用MDK来开发!怎么地吧!
责任编辑:haq
-
mcu
+关注
关注
147文章
19135浏览量
404088 -
MPU
+关注
关注
0文章
463浏览量
51577 -
开发板
+关注
关注
26文章
6426浏览量
120949 -
树莓派
+关注
关注
122文章
2082浏览量
110771
原文标题:【独家】我就要用MDK来开发树莓Pico,怎么地吧!
文章出处:【微信号:RTThread,微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
Pico示波器如何实现多通道同步采集
CW32单片机支持哪几种开发环境,比较常用的MDK支持吗?
【EK-RA6E2开发指南】开发环境搭建
Pico2-ICE FPGA开发板的应用示例

在树莓派Pico上运用不同的并行化手段
树莓派操作系统:版本、特性及设置完整指南!

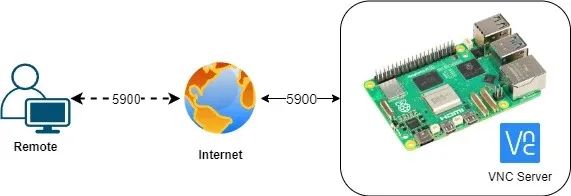
如何在树莓派上设置并使用VNC?远程访问完整指南!
如何在树莓派上安装并运行 Arduino 集成开发环境!

树莓派小技巧:无需键盘或显示器,如何通过WiFi设置树莓派?
树莓派分类器:用树莓派识别不同型号的树莓派!
树莓派与EthernetHat:用ChatGPT实现的MQTT智能家居项目!
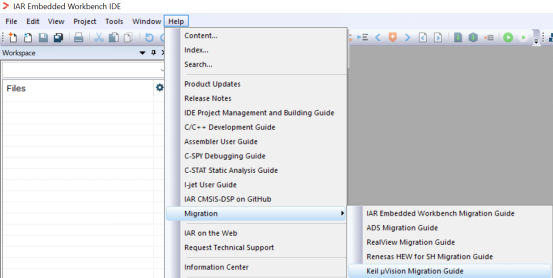
从Keil MDK到IAR EWARM:通过工程迁移实现项目资产的更好管理



评论