 基于恩智浦MPC5744P的SAE J1939协议栈开发
基于恩智浦MPC5744P的SAE J1939协议栈开发
摘要
本篇笔记主要记录基于恩智浦MPC5744P的SAE J1939协议栈开发,接口设计,以之前总结的CAN驱动设计为基础。
准备工作
准备一个CAN驱动可以正常工作的工程。
熟悉J1939协议文档和标准,特别是J1939-21和J1939-81。
CAN
恩智浦的MPC5744P控制器局域网络CAN,跟我们之前使用的恩智浦Kinetis KV, 等系列的flexCAN结构基本是一样的,MPC5744P 支持CAN2.0B。CAN 的高层协议,J1939 是基于CAN2.0B的扩展帧,29位标识符,支持单帧和多帧收发通信。本次设计主要实现SAE J1939 数据链路层和网络管理层。
J1939和CAN接口
接口函数
基于上次做好的CAN驱动提供一个发送函数,一个接收处理函数,作为与J1939协议栈的接口,来完成J1939所有功能的实现和应用。
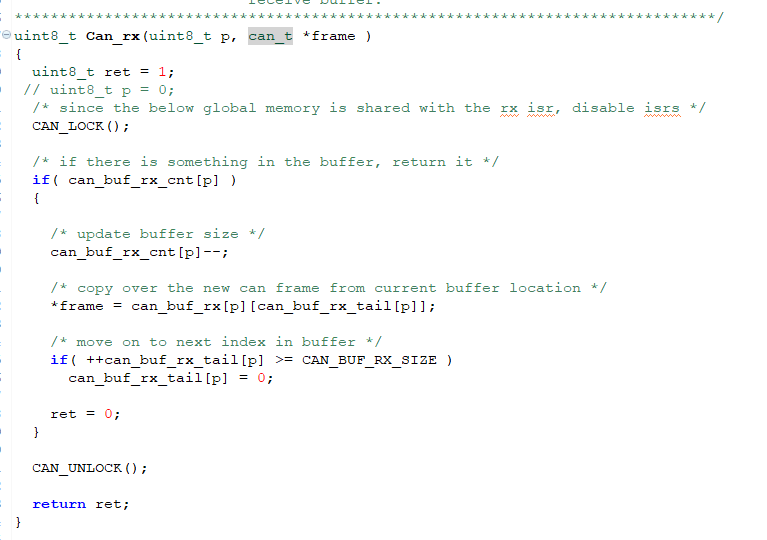
接收接口用于获取总线上的CAN报文帧,然后交由J1939的处理函数解析。这里发送函数未列出。
数据类型
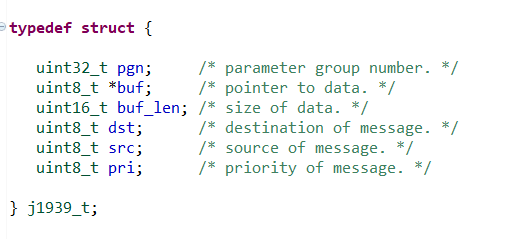
根据J1939的标准和要求特定义以下数据类型,方便程序的开发和应用
J1939对外接口
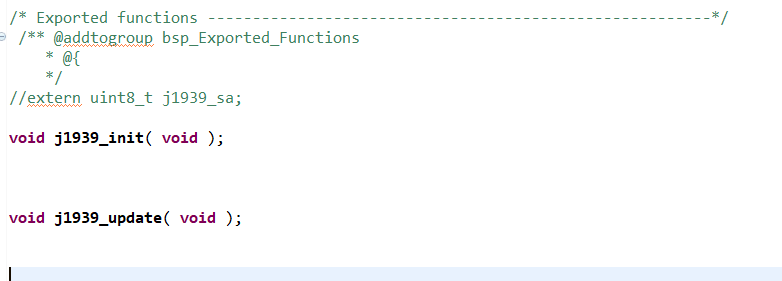
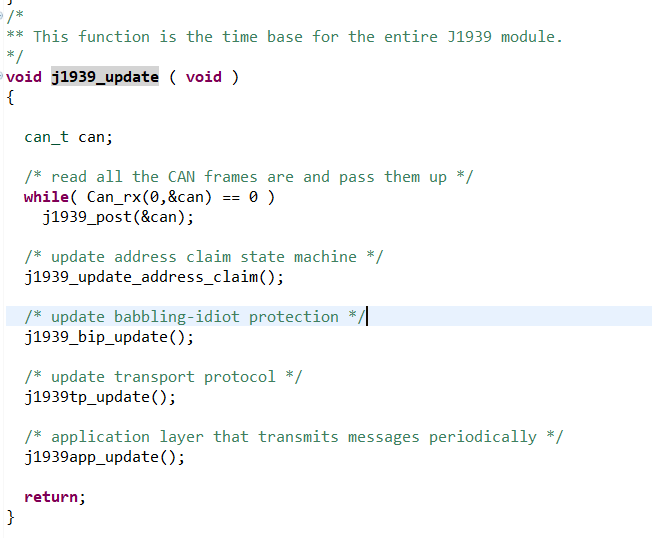
J1939对外接口除过初始化,就一个函数,所有功能在这个函数里实现,因为J1939协议栈内部有很多时基,设计的是基于10ms,所以这个函数放在10ms里调用。
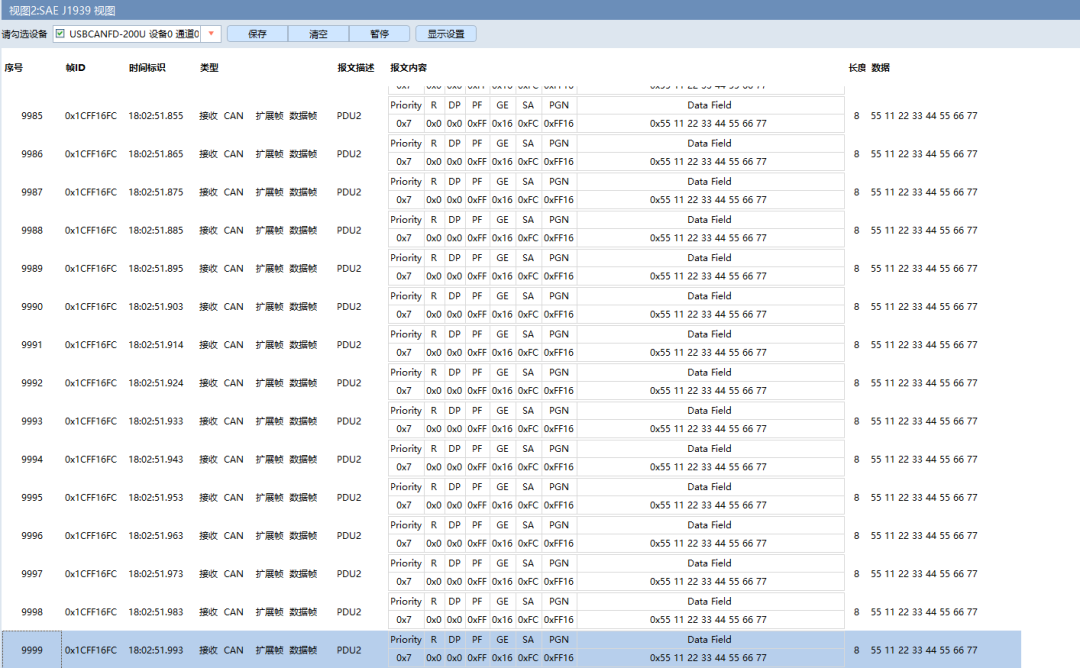
测试
SAE J1939协议是CAN的高层协议,是一种广泛应用于重型车,特种车,农机,以及非路面设备车辆等。
SAE J1939 协议栈 主要参考标准J1939-21 数据链路层, J1939-81 网络管理层 。标准的详细内容请参考SAE 的J1939标准。
编辑:jq
-
CAN
+关注
关注
57文章
2744浏览量
463627 -
数据链路层
+关注
关注
0文章
55浏览量
11987 -
接口函数
+关注
关注
0文章
11浏览量
8193
原文标题:SAE J1939在恩智浦MPCxxx上实现
文章出处:【微信号:InterruptISR,微信公众号:嵌入式程序员】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
深入解析J1939-73:车辆诊断通信的标准与应用

使用恩智浦无线FRDM开发板实现创新无线解决方案

恩智浦半导体推出全新S32J系列高性能以太网交换机和网络控制器
恩智浦半导体推出S32J系列以太网交换机和网络控制器
恩智浦在杭州召开汽车生态技术峰会,推出全新S32 CoreRide开放平台
《恩智浦FRDM-MCXN947开发实践指南》上线啦

恩智浦发布S32 CoreRide开放平台,旨在突破SDV开发的集成障碍
恩智浦发布年度企业可持续发展报告
NVIDIA TAO工具套件功能与恩智浦eIQ机器学习开发环境的集成
STM32WB55RG是否可以使用j-flash通过j-link烧录协议栈和FUS bin文件?
恩智浦Real-time Edge v2.7正式发布!

恩智浦发布新一代智能语音技术组合的语音识别引擎






 工商网监
工商网监
评论