 基于毫米波雷达的自动感应门应用的参考设计
基于毫米波雷达的自动感应门应用的参考设计
毫米波雷达具有敏锐的洞察力、探测范围广、测量数据精确、不受环境因素影响、穿透力强等高实用性的特点,在生产生活中应用极为广泛。基于毫米波雷达传感器的设备不仅为我们的生活带来了很多便利,还保证了设备运行的安全和高效性,如商场自动感应门、电梯门等设备中均有应用。
早前,TI发布了多款工业级毫米波雷达传感器,主要涵盖了楼宇自动化、智能安防、液位监控、交通流量监控、工业机器人、自动感应门等领域。本期文章主要讲述毫米波雷达在自动感应门上的应用。
(图源:TI官网)
自动感应门工作原理
自动感应门主要由主控器、传感器、驱动电机三部分组成。传感器对进门或出门区域进行实时探测,当感应到有人员移动时,及时地将脉冲信号传输至主控器中由主控器分析处理,通过主控器激活电机完成开门操作。
基于IWR6843的自动感应门应用的参考设计
IWR6843是一款由TI发布的60-GHZ毫米波雷达传感器,由于毫米波不受雨、雾、烟雾、光照强度等环境所约束,该传感器主要在自动感应门领域的自动推拉门、车库门、电梯门等实现多场景应用,推进大门朝节能化、智能化发展。TI还在IWR6843基础上进行了升级,推出了IWR6843 ISK 、IWR6843 ODS 、IWR6843AOP ,每块套件的性能略有不同。IWR6843 ISK 拥有水平方向120°、垂直方向30°的广角感应区域。IWR6843 ODS 拥有水平方向120°、垂直方向120°的广角感应区域。IWR6843AOP 拥有水平方向130°、垂直方向130°的广角感应区域。并且TI就IWR6843 ISK给出了自动感应门参考设计TIDEP-01018。
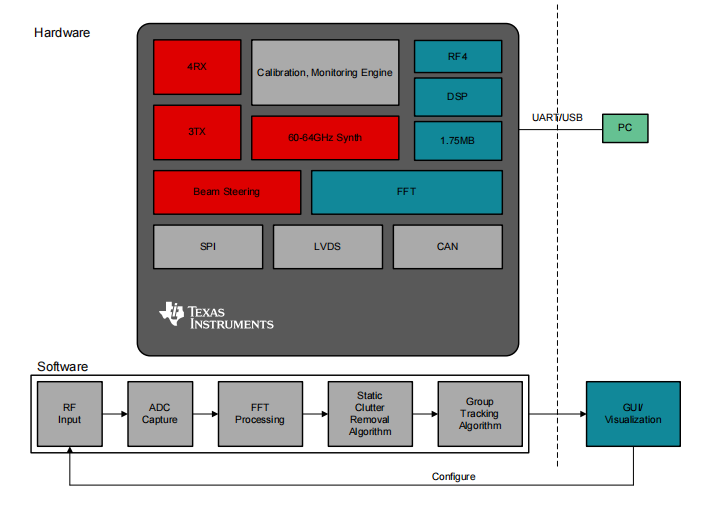
(主框架图 图源:TI)
IWR6843 ISK是一款60GHz~64GHz的毫米波传感器套件,该套件可通过USB可实现数据访问和供电,内部集成了4根接收天线、3根发射天线和DSP数据信号处理器。接口支持与MMWAVEICBOOST 和 DCA1000 匹配,方便进行数据访问和开发。
TIDEP-01018参考设计是在IWR6843 ISK基础上加入了ICB(工业载板),并且在IWR6843传感器中集成了完整的雷达信号处理链。该设计可对水平方向120°,距离为5m内的人进行跟踪、和速度采集,判断人行走的方向进行开关门操作。
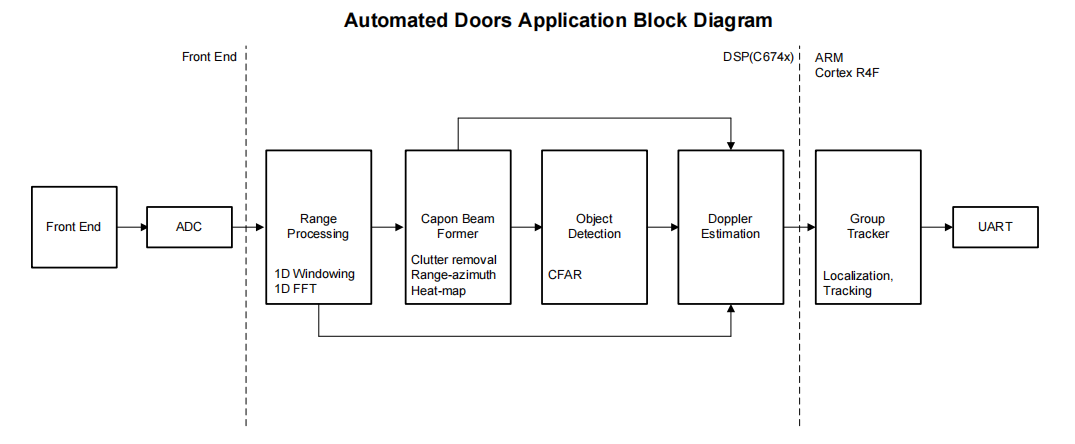
(基于IWR6843自动感应门工作流程 图源:TI)
前端部分主要进行数模转化,信号处理部分主要还是在DSP处理器中进行处理,经DSP处理后的数据得出距离、角度等信息,再进入ARM Cortex R4F处理器进行目标跟踪。通过1D windowing 和 1D FFT进行探测范围数据处理,在Capon波束形成器中去除静态杂波,生成协方差矩阵和逆角普存储在内存中,并将二者结合,构建距离矩阵热图。在距离矩阵热图内通过两次CFAR算法进行目标检测。主要是对检测范围内的每个水平方向角度检测,将第一次的结果再通过CFAR检测一次然后存在L2储存中,完成目标检测,该过程是为了精确锁定目标。再通过多普勒效应对目标的距离和速度进行检测,最后进入ARM Cortex R4F处理器对目标进行追踪、判断、输出开门信号。
任务处理模式
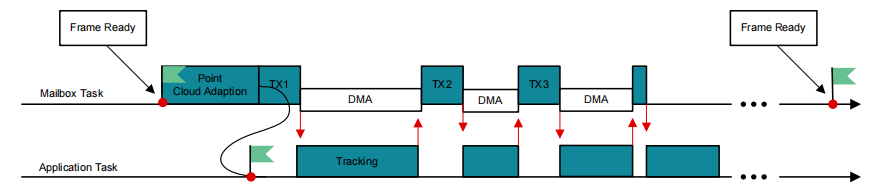
(任务处理模型 图源:TI)
在任务处理方式上该设计有自己独有的处理方式。如上图所示,Mailbox为高优先级任务,Application为低优先级任务。在系统配置中,处于优先级的Mailbox任务会收到一个来自DSP准备就绪的信号,Mailbox任务会将相关数据复制于TCM中,并且与应用Application完成通信,给Application发布任务,创建传输帧头,并且为框架内的每一部分启动一个DMA进程。每当DMA与UART进行数据传输时,Mailbox任务就会产生一个低优先级的任务。当DMA进程结束时可以新增DMA,实现任务处理和DMA之间的并行性。
群跟踪算法
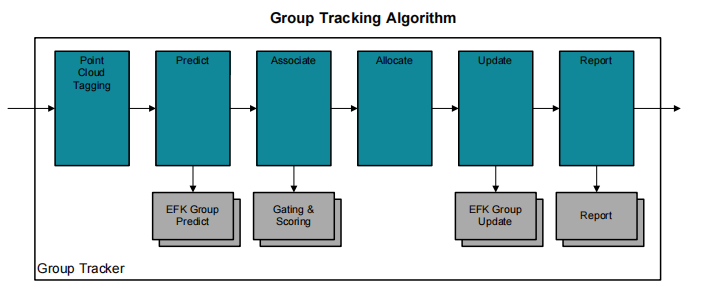
(群跟踪算法流程图 图源:TI)
群跟踪算法是TI在该设计中加入的智能算法,这个智能算法的加入,将开关门操作更合理化。通过程序任务先创建一个用来描述传感器场景、行为、目标,具有配置参数算法的实例。然后该算法可对先前配置好的参数进行调用,每帧可调用一次。可建立多组数据建立数据库。该算法可以通过测量输入的极坐标数据,对目标进行追踪。还可通过算法预测移动目标的距离、移动方向和速度来判断是否需要进行开关门操作。
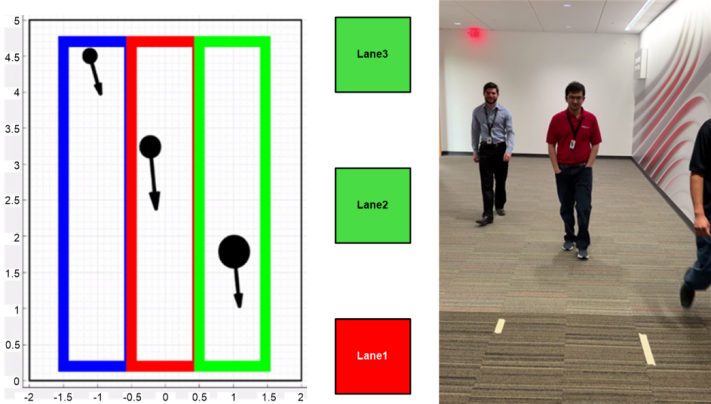
(图源:TI)
该设计有什么优势
降低出错率,该设计加入了多次检测功能和群跟踪算法,能有效判断移动的目标是否有开门需求。如传感器检测到入口有移动目标,仅仅只是路过不入门,则无需开门降低电力损耗和不必要的能源浪费。
静态对象检测功能,该设计可对静态物体进行检测,防止危险事故发生。例如,自动感应门门轨上有异物放置或人员停留,通过传感器芯片的算法检测后作出判断,保证门处于打开状态,避免事故发生。
低成本,该设计集成度高、检测结果精准、检测范围广,一个传感器可覆盖同一范围内的多个门,能够有效地降低电路设计的难度和成本。例如,现在市面上很多传感只能1对1的使用,无形中提高了成本。
智能,该设计采用了毫米波雷达传感器和多种检测方法,能够快速检测移动目标的距离和速度,及时调整开门的时间和开门的速度,避免移动目标速度太快,到达门前时未及时开门,降低交互体验。
总结
总的来说该设计将自动感应门变得智能化、高效化,静态检测功能提高了设备运行的安全性。还加入了群跟踪算法使开关门操作更合理,减少电机的使用次数,降低了电能损耗。
早前,TI发布了多款工业级毫米波雷达传感器,主要涵盖了楼宇自动化、智能安防、液位监控、交通流量监控、工业机器人、自动感应门等领域。本期文章主要讲述毫米波雷达在自动感应门上的应用。
(图源:TI官网)
自动感应门工作原理
自动感应门主要由主控器、传感器、驱动电机三部分组成。传感器对进门或出门区域进行实时探测,当感应到有人员移动时,及时地将脉冲信号传输至主控器中由主控器分析处理,通过主控器激活电机完成开门操作。
基于IWR6843的自动感应门应用的参考设计
IWR6843是一款由TI发布的60-GHZ毫米波雷达传感器,由于毫米波不受雨、雾、烟雾、光照强度等环境所约束,该传感器主要在自动感应门领域的自动推拉门、车库门、电梯门等实现多场景应用,推进大门朝节能化、智能化发展。TI还在IWR6843基础上进行了升级,推出了IWR6843 ISK 、IWR6843 ODS 、IWR6843AOP ,每块套件的性能略有不同。IWR6843 ISK 拥有水平方向120°、垂直方向30°的广角感应区域。IWR6843 ODS 拥有水平方向120°、垂直方向120°的广角感应区域。IWR6843AOP 拥有水平方向130°、垂直方向130°的广角感应区域。并且TI就IWR6843 ISK给出了自动感应门参考设计TIDEP-01018。
(主框架图 图源:TI)
IWR6843 ISK是一款60GHz~64GHz的毫米波传感器套件,该套件可通过USB可实现数据访问和供电,内部集成了4根接收天线、3根发射天线和DSP数据信号处理器。接口支持与MMWAVEICBOOST 和 DCA1000 匹配,方便进行数据访问和开发。
TIDEP-01018参考设计是在IWR6843 ISK基础上加入了ICB(工业载板),并且在IWR6843传感器中集成了完整的雷达信号处理链。该设计可对水平方向120°,距离为5m内的人进行跟踪、和速度采集,判断人行走的方向进行开关门操作。
(基于IWR6843自动感应门工作流程 图源:TI)
前端部分主要进行数模转化,信号处理部分主要还是在DSP处理器中进行处理,经DSP处理后的数据得出距离、角度等信息,再进入ARM Cortex R4F处理器进行目标跟踪。通过1D windowing 和 1D FFT进行探测范围数据处理,在Capon波束形成器中去除静态杂波,生成协方差矩阵和逆角普存储在内存中,并将二者结合,构建距离矩阵热图。在距离矩阵热图内通过两次CFAR算法进行目标检测。主要是对检测范围内的每个水平方向角度检测,将第一次的结果再通过CFAR检测一次然后存在L2储存中,完成目标检测,该过程是为了精确锁定目标。再通过多普勒效应对目标的距离和速度进行检测,最后进入ARM Cortex R4F处理器对目标进行追踪、判断、输出开门信号。
任务处理模式
(任务处理模型 图源:TI)
在任务处理方式上该设计有自己独有的处理方式。如上图所示,Mailbox为高优先级任务,Application为低优先级任务。在系统配置中,处于优先级的Mailbox任务会收到一个来自DSP准备就绪的信号,Mailbox任务会将相关数据复制于TCM中,并且与应用Application完成通信,给Application发布任务,创建传输帧头,并且为框架内的每一部分启动一个DMA进程。每当DMA与UART进行数据传输时,Mailbox任务就会产生一个低优先级的任务。当DMA进程结束时可以新增DMA,实现任务处理和DMA之间的并行性。
群跟踪算法
(群跟踪算法流程图 图源:TI)
群跟踪算法是TI在该设计中加入的智能算法,这个智能算法的加入,将开关门操作更合理化。通过程序任务先创建一个用来描述传感器场景、行为、目标,具有配置参数算法的实例。然后该算法可对先前配置好的参数进行调用,每帧可调用一次。可建立多组数据建立数据库。该算法可以通过测量输入的极坐标数据,对目标进行追踪。还可通过算法预测移动目标的距离、移动方向和速度来判断是否需要进行开关门操作。
(图源:TI)
该设计有什么优势
降低出错率,该设计加入了多次检测功能和群跟踪算法,能有效判断移动的目标是否有开门需求。如传感器检测到入口有移动目标,仅仅只是路过不入门,则无需开门降低电力损耗和不必要的能源浪费。
静态对象检测功能,该设计可对静态物体进行检测,防止危险事故发生。例如,自动感应门门轨上有异物放置或人员停留,通过传感器芯片的算法检测后作出判断,保证门处于打开状态,避免事故发生。
低成本,该设计集成度高、检测结果精准、检测范围广,一个传感器可覆盖同一范围内的多个门,能够有效地降低电路设计的难度和成本。例如,现在市面上很多传感只能1对1的使用,无形中提高了成本。
智能,该设计采用了毫米波雷达传感器和多种检测方法,能够快速检测移动目标的距离和速度,及时调整开门的时间和开门的速度,避免移动目标速度太快,到达门前时未及时开门,降低交互体验。
总结
总的来说该设计将自动感应门变得智能化、高效化,静态检测功能提高了设备运行的安全性。还加入了群跟踪算法使开关门操作更合理,减少电机的使用次数,降低了电能损耗。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
毫米波雷达
+关注
关注
106文章
1023浏览量
64180
发布评论请先 登录
相关推荐

毫米波雷达感应Demo
1硬件介绍1.1模块介绍1.1.160GHz毫米波雷达模块-BGT60TR13CBGT60TR13C具有小巧的外形和低功耗,该特点可为许多应用带来了创新、直观的传感功能,可用于监控、照明和智能家电中

毫米波雷达与超声波雷达的区别是什么
毫米波雷达与超声波雷达是两种不同的雷达技术,它们在工作原理、性能特点、应用领域等方面存在一定的差异。以下是对这两种雷达技术的介绍: 工作原理
毫米波雷达与多普勒雷达区别是什么
毫米波雷达与多普勒雷达是两种不同类型的雷达系统,它们在工作原理、应用领域和性能特点等方面存在明显的区别。 工作原理 毫米波
简述毫米波雷达的结构、原理和特点
毫米波雷达是一种利用毫米波段电磁波进行探测和测量的雷达系统,具有高分辨率、高灵敏度、高抗干扰能力等特点,在军事、航空、航天、交通、气象等领域
基于毫米波雷达的手势识别算法
远程手势识别模型。然后,我们设计了一个CNN来学习点的特征以进行识别。(ii)我们利用毫米波雷达传感器来实现所提出的模型,从而自动识别手势。(iii)我们验证了我们提出的模型在几种现实世界情况下(例如
发表于 06-05 19:09
毫米波雷达在智能网联汽车中的应用
毫米波雷达(MMW)是一种新型的雷达技术,逐渐在智能网联汽车中得到广泛应用。它利用毫米波频段的电磁波进行探测和测距,具有高分辨率、高精度、高
毫米波雷达的作用 毫米波雷达与超声波雷达的区别
毫米波雷达是一种高频率雷达系统,可以在毫米波频段(30-300 GHz)进行物体探测和测距,由于其具有高分辨率、较低的互相干扰和较强的透射穿透能力,被广泛应用于众多领域。而超声波
毫米波雷达与超声波雷达的区别联系
毫米波雷达(Millimeter-wave Radar)和超声波雷达(Ultrasonic Radar)是两种常用于测距和探测的技术,在原理、应用、优缺点等方面存在着一些明显的区别。 一
毫米波雷达输出信号
毫米波雷达是一种使用毫米波频段进行雷达探测的设备。它是一种高频雷达,工作频段通常在30 GHz到300 GHz之间。相比于传统的千兆赫
国内4D毫米波雷达厂商名录
4D毫米波雷达(也被称为4D成像雷达)可以实现类似于激光雷达的成像功能,而在成本方面只有激光雷达的10%-20%。那么,4D
低成本毫米波雷达系统设计与研发
毫米波雷达系统在汽车、工业感知和安全领域等多个领域有着广泛的应用。然而,传统毫米波雷达系统的高昂成本限制了其普及。本文介绍了一种低成本毫米波
毫米波雷达技术在自动驾驶中的关键作用:安全、精准、无可替代
自动驾驶技术正以前所未有的速度不断演进,而其中的关键之一就是毫米波雷达技术。作为自动驾驶系统中的核心感知器件之一,毫米波





 工商网监
工商网监
评论