 一个程序是如何运行起来的
一个程序是如何运行起来的

相信很多同学都会有疑问,一个程序是如何运行起来的,为什么我们在shell中执行了一个程序,它的main函数就会被调用呢?在main函数被调用之前及之后,又经历了什么呢?
今天我们就来详细的说下这个问题。
还是和之前一样,我画了一张程序运行的全景图,在上图中,一个程序运行所经历的代码段,我都标注了其所在的git仓库、源文件、及函数名,想要自己看源码的,可以参考下上图中的这些信息。
我们先从整体上讲一下这张图。
在linux下,我们一般都是通过shell来执行程序的。
shell其实也是一个普通的程序,它也有自己的main函数,它在正常运行后,会通过调用read_command函数,来等待用户输入命令。
在接收到用户输入的命令后,shell会先使用fork系统调用,创建一个子进程,然后再在这个子进程中,通过execve系统调用,执行最终的用户程序。
在子进程执行用户程序期间,shell主进程会调用waitpid函数,阻塞等待子进程的完成,子进程完成之后,waitpid从阻塞状态中返回,且status参数中会带着子进程的退出码,这个退出码会在后续的逻辑中被保存起来,供用户查询。
之后,shell主进程进入到下一次循环,继续等待用户输入命令并执行。
以上就是shell的主体逻辑,对应于上面全景图中的蓝色部分。
下面我们再来看下linux内核中有关execve系统调用的代码,也就是上面全景图中的绿色部分。
shell通过execve系统调用,告知linux内核,要在当前进程中执行目标程序,linux内核经过层层代码,最终到达load_elf_binary函数。
该函数是整个系统调用中最核心的一段逻辑,它主要用来为目标程序准备各种执行环境。
比如,映射代码区、数据区等到当前进程的虚拟地址空间,将程序名、环境变量、程序参数、及各种其他数据,有规律的压入到新分配的栈中,等等。
之后,load_elf_binary函数会调用start_thread,进而会调用start_thread_common函数。
在该函数里,会将返回到用户区之后,要执行的,用户区程序的起始地址,设置到regs-》ip里,同时也会将上面新初始化好的,用户堆栈的栈顶地址,设置到regs-》sp里。
当execve系统调用返回到用户区之后,regs-》ip和regs-》sp里的值,会分别赋值到rip和rsp寄存器里,这样指定的用户程序就可以继续执行了。
这一流程我们在之前的文章 精致全景图 | 系统调用是如何实现的 中讲过,这里就不再赘述。
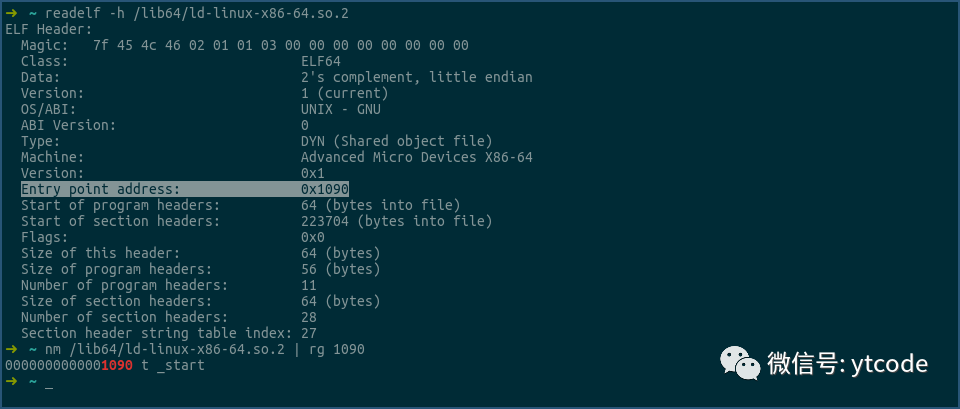
不过这里还是有一点需要注意,就是设置到regs-》ip中的地址,并不是我们自己程序的起始地址,而是动态链接器 /lib64/ld-linux-x86-64.so.2 的起始地址。
之所以要设置动态链接器的起始地址,是因为我们需要在返回到用户区之后,让其可以继续为我们的程序准备执行环境,比如,帮忙加载程序依赖的各种动态链接库等。
在动态链接器为我们的程序准备好执行环境之后,它会从进程堆栈的auxiliary vector区,取出最终用户程序的真正起始地址,并跳转到该位置开始执行。
auxiliary vector区存放的用户程序的起始地址,是上面linux内核初始化堆栈时设置的。
动态链接器相关的代码就是这些,它对应于上面全景图中紫色的部分。
在跳转到我们自己程序的起始地址后,首先执行的并不是我们写的main函数,而是glibc里名为_start的一段汇编代码。
这段汇编代码也比较简单,主要是从堆栈中获取main函数所需的argc,argv等参数,然后最终调用我们写的main函数。
当main函数返回之后,glibc里的后续代码,会将main函数的返回值,当作该进程的退出码,然后调用exit结束该进程。
这些代码对应于上面全景图中的粉色部分。
进程调用exit退出之后,shell主进程也会从waitpid的阻塞状态中返回,然后继续进行下一次循环。
以上就是程序完整的启动和结束流程。
下面我们来看下具体的源码实现。
注意,为了方便理解,很多代码我们都做了删减。
首先是shell部分,shell是一个普通的程序,它也有自己的main函数:
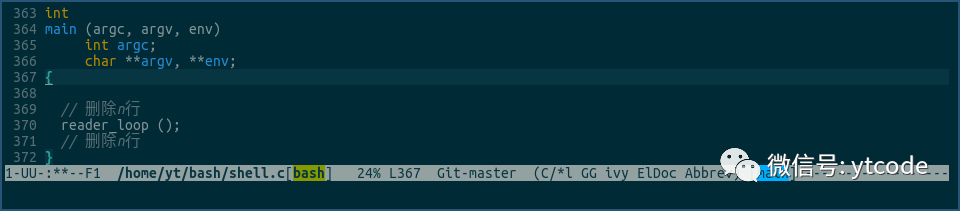
该函数里调用了reader_loop:
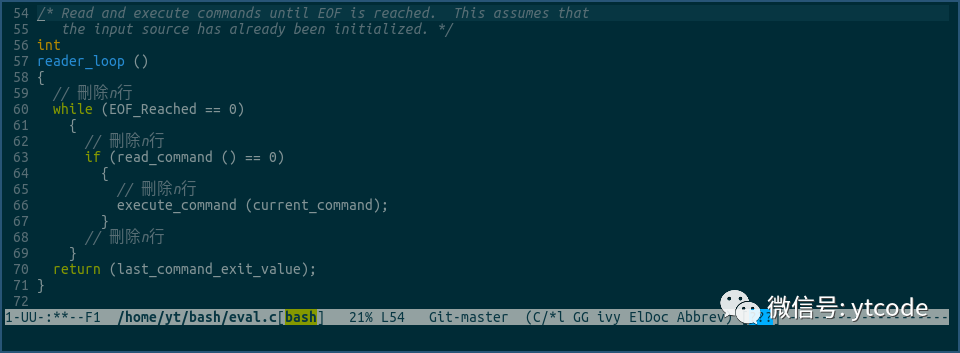
reader_loop的主体逻辑是,在while循环里不断的使用read_command函数读取用户输入的命令,然后使用execute_command执行该命令。
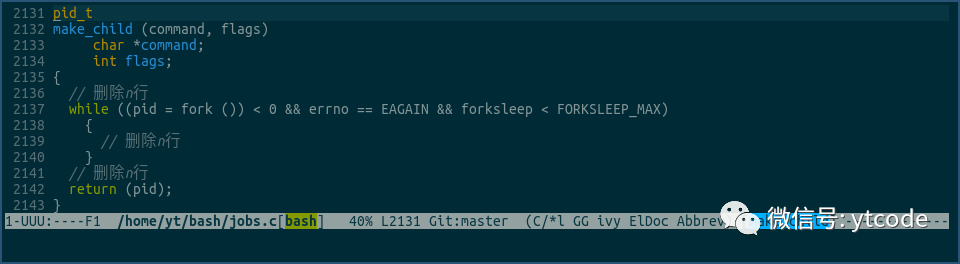
execute_command函数经过层层代码后,会使用下图中的fork,创建一个子进程:
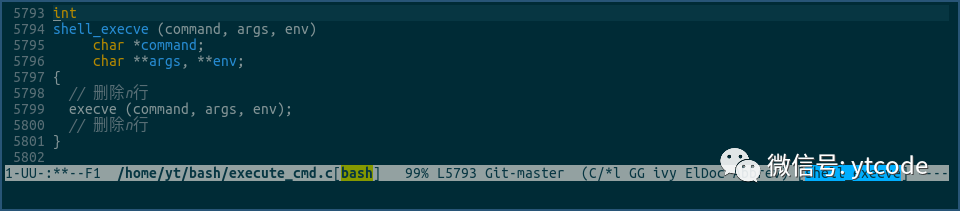
然后在该子进程中,使用execve系统调用,告知linux内核,用当前子进程执行新的用户程序:
在shell主进程中,会调用waitpid函数,阻塞等待子进程的完成:
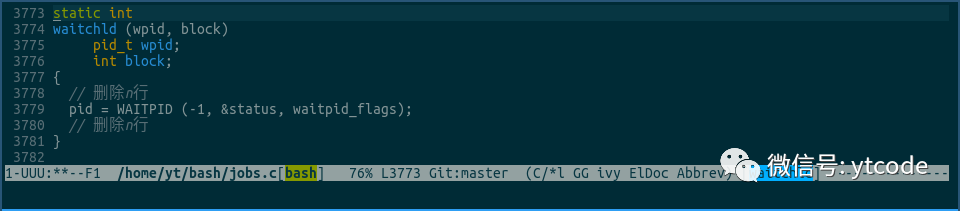
当子进程退出后,waitpid会从阻塞状态中返回,并在status里携带子进程的退出码,之后shell主进程又返回上面的read_command函数,继续等待用户下一条命令的输入。
以上就是bash的主体逻辑,对应于上面全景图中的蓝色部分。
下面我们继续看全景图中的绿色部分,也就是linux内核中有关execve的代码。
当shell的子进程执行execve函数时,linux内核中对应的系统调用被触发:

沿着函数的调用链,我们会找到一个名为do_execveat_common的函数,在该函数中,会将目标程序的文件名、环境变量、及各种程序参数等字符串,拷贝到新创建的用户堆栈区:
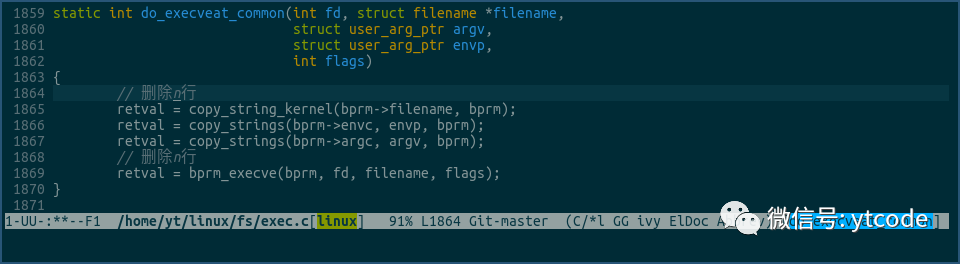
此时,新创建的堆栈区里内容,就如上面全景图中右下角的a1-a9, b1-b8部分构成的二维网格区域里所示的内容。
其中,黄色区域里存放的是程序参数 。/a.out hello world,蓝色区域里存放的是环境变量 SHLVL=2, HOME=/, TERM=linux, PWD=/,橘黄色区域里存放的是要执行的程序文件名 。/a.out。
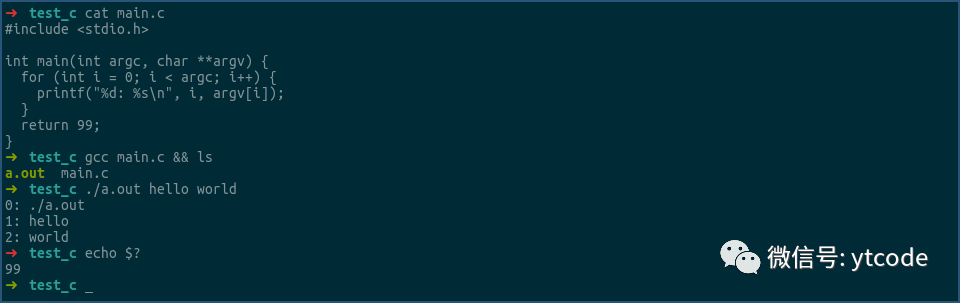
这些内容和我们执行的测试程序,及其所处的环境也正好一样:

继续沿着内核函数调用链,我们最终会来到load_elf_binary函数,该函数是整个系统调用的核心。
由于linux上执行的程序基本上都是elf格式,所以内核选择的加载函数是load_elf_binary,看这个函数时,可以参考elf格式的man文档:
https://man.archlinux.org/man/elf.5
该函数比较复杂,我对其做了大量删减,并添加了很多注释:

该函数最后会调用start_thread函数,进而会调用start_thread_common函数:
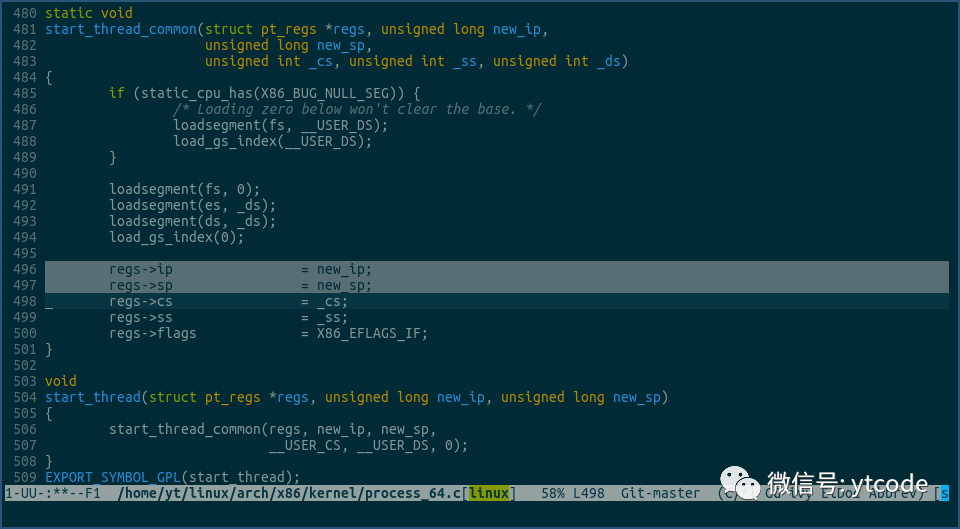
这个函数重点需要注意的是对regs-》ip和regs-》sp的赋值,其作用在load_elf_binary函数的截图中已经注释过了,就是在返回到用户区之后,这两个字段的值会被分别拷贝到rip和rsp寄存器里,所以这里的赋值,就相当于在返回用户区之后,对rip和rsp寄存器的赋值,这个在 精致全景图 | 系统调用是如何实现的 有讲。
到这里内核部分的代码就都已经结束了。
由load_elf_binary函数截图中可见,regs-》ip中设置的地址是elf_entry,即动态链接器的起始地址,而不是我们自己程序的起始地址。
原因是,我们还需要动态链接器继续帮我们准备执行环境,比如帮我们加载程序依赖的动态链接库等。
所以在execve系统调用返回到用户区之后,代码流程就进入到了动态链接器里的逻辑,即上面全景图中的紫色区域:
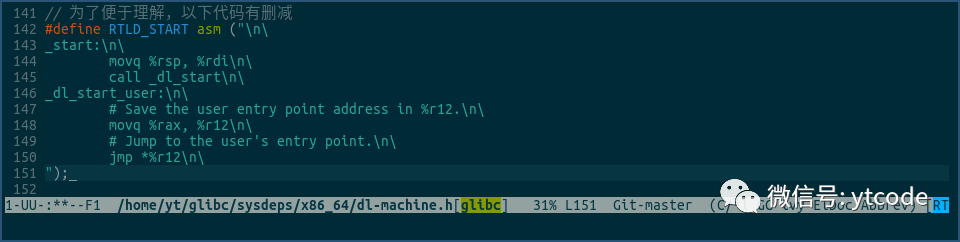
上图中的_start是动态链接器的起始执行地址,这个可以通过下面的方式来确认:
在_start函数中,先将rsp寄存器的值,即上面内核新初始化的堆栈的栈顶地址,赋值到rdi中,然后再使用call指令,调用_dl_start函数。
之所以要赋值到rdi寄存器中,是因为c语言的calling convention约定好的,用此方式来传递参数。
再看_dl_start函数:

该函数调用了_dl_start_final,返回一个地址,这个地址就是我们自己程序的起始地址。
再看_dl_start_final:

该函数又调用了_dl_sysdep_start:
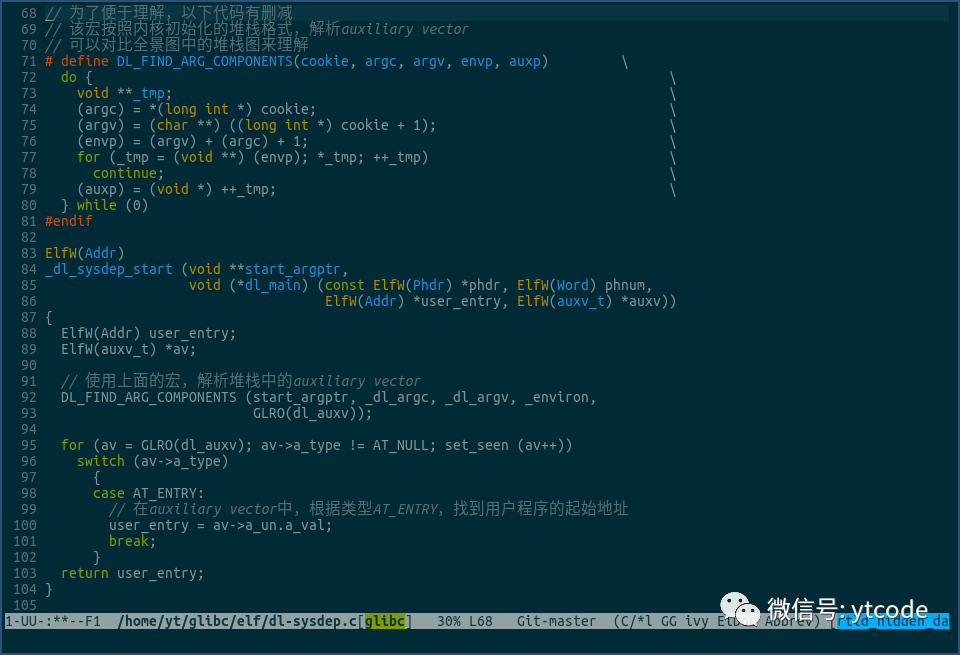
在这里,动态链接器通过内核初始化的堆栈区中的auxiliary vector,找到最终用户程序的起始执行地址。
再之后,动态链接器的函数调用链依次退出,最终返回到上面的_start函数。
_start函数之后会顺序执行_dl_start_user,相关代码也在上面的_start函数的截图里。
其逻辑是,先将rax中的值,即_dl_start函数返回的最终用户程序的起始地址,赋值到r12寄存器中,然后再jmp到r12寄存器指向的地址,即开始执行最终的用户程序逻辑。
至于rax中的值,为什么是_dl_start函数返回的地址,这个其实也是 c calling convention 中的约定,感兴趣可以自己查下。
以上就是动态链接器的全部逻辑,其对应于全景图中的紫色部分。
最后,逻辑进入到了全景图中的粉色部分。
动态链接器从内核设置的auxiliary vector中,获取的用户程序的起始地址,还并不是我们的main函数,而是glibc中一段名为_start的代码,这个可以通过下面的方式确认:
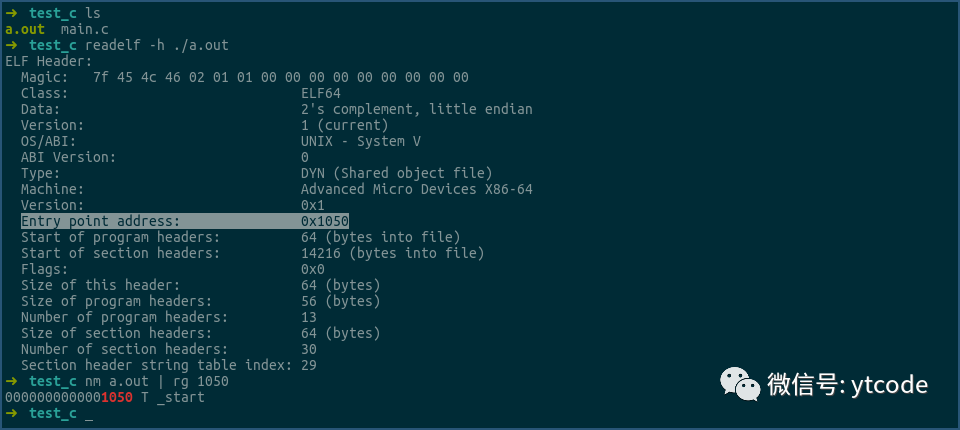
该_start代码段内容如下:
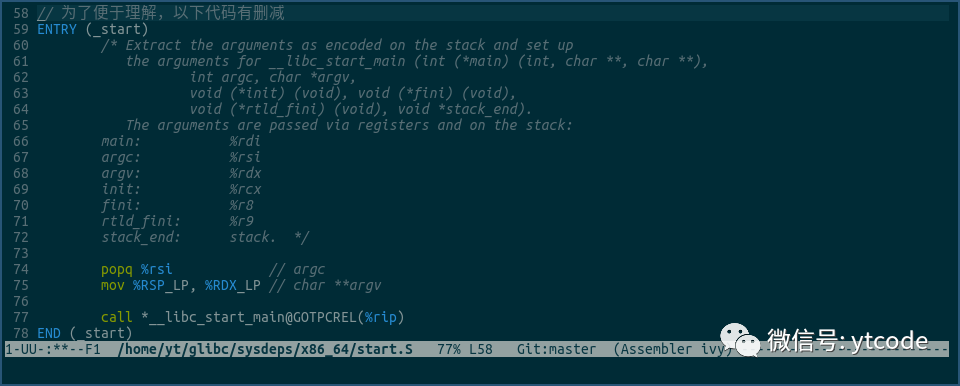
它从堆栈中获取到argc和argv,然后调用__libc_start_main:
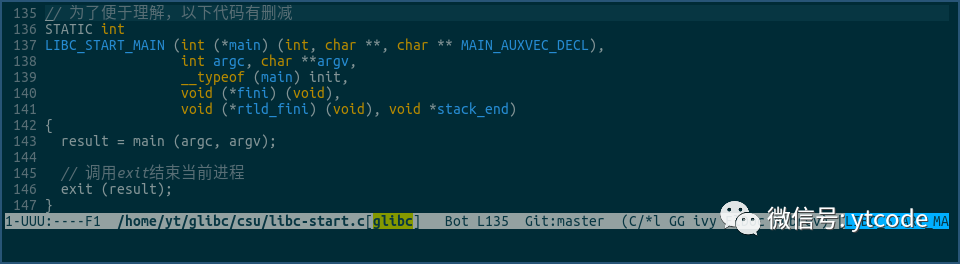
在__libc_start_main里,才真正的调用了我们写的main函数。
当main函数返回之后,__libc_start_main里用main函数返回的值,作为该进程的退出码,然后调用exit退出当前进程。
当该进程退出后,shell主进程也从waitpid的阻塞状态返回,并携带用户程序的退出码。
在上面全景图这个示例中,返回码为99:
之后,shell主进程又进入到下一次循环,继续等待用户命令并执行,也就是说,又进入到全景图中的蓝色部分。
至此,在linux上执行程序的流程,就形成了一个完整闭环。
你,学废了吗?
责任编辑:haq
-
程序
+关注
关注
117文章
3847浏览量
85450 -
Shell
+关注
关注
1文章
375浏览量
25481
原文标题:精致全景图 | 程序是如何运行起来的
文章出处:【微信号:LinuxDev,微信公众号:Linux阅码场】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
MCU代码需要搬到RAM中才能运行吗?不这样做会有什么不妥嘛?
Linux 下交叉编译实战:跑起来你的第一个 STM32 程序

**CW32L012****开发评估板的第一个程序**
使用Nuclei Studio IDE计算程序运行时间
大数组程序无法运行怎么解决?
一起来玩转CW32L011无刷直流电机驱动开发板
如何打造一个属于自己的手势识别应用

请问Linux+rtos的1.9版本sdk大核开机自启动一个程序怎么关闭?
API让电商“飞”起来,告别手动操作

如何将Flash刷写程序放到SRAM中运行?
同样的代码在官方开发板上运行正常,在自己板子上就跑不起来,怎么办?



评论