 深入探讨CAN节点错误管理机制
深入探讨CAN节点错误管理机制
CAN节点的稳定性、可靠性和安全性得益于其强大的错误管理机制。那么,CAN节点为什么能感知错误?又是如何响应错误?您是否能清晰地想象出这一过程?本文将为大家详细分析CAN节点错误管理的工作过程。
节点电路构成
如图1所示,MCU作为主控制器,完成CAN控制器和功能电路的控制。
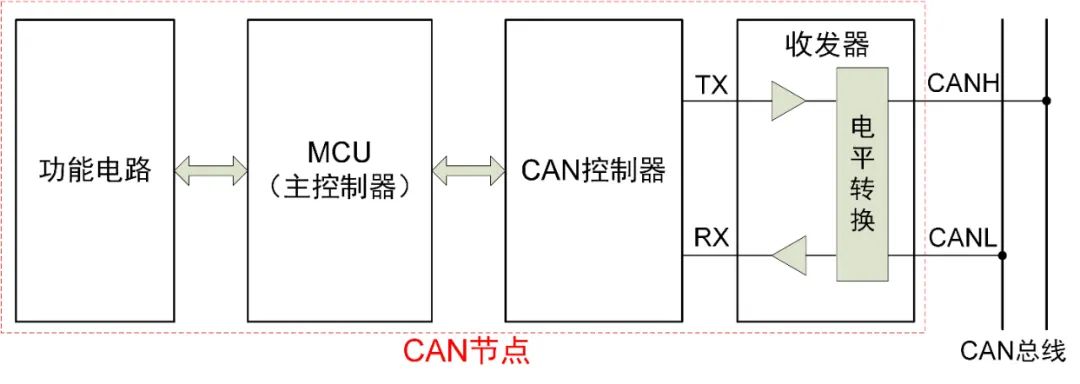
图1 CAN节点组成框图
CAN控制器是工作于数据链路层的器件,集成了CAN规范中数据链路层的全部功能,其功能由软件和硬件共同实现,从设备供应商买回来的CAN控制器已经把相应的逻辑固化在其硅片之中;
MCU是工作于应用层的器件,其功能由软件和硬件共同实现,MCU运行的程序可由设计者灵活设计,以实现CAN节点的特定功能;
CAN收发器工作于物理层,其功能完全由硬件实现,其作用是将CAN控制器的逻辑电平转化为CAN总线的模拟差分信号,以及把总线模拟差分信号转换成CAN控制器的逻辑电平。
CAN节点的错误管理属于CAN通信规范数据链路层的内容,具体来说,错误管理是通过MCU和CAN控制器来实施的。可以说,CAN控制器是错误管理的基础设施,我们可以从两个方面理解其工作逻辑:一是如何感知错误,二是如何响应错误。
注:
1、本文所说的CAN规范指的是德国BOSCH公司的《CAN Specification Version 2.0》。
节点如何感知错误?
如前文所述,节点对总线错误的识别是通过CAN控制器来完成的。CAN控制器输出给收发器发送引脚TX的逻辑信号位会从收发器接收引脚RX接收,这使得CAN控制器可以在发送一个逻辑位期间同时监测总线的实际电平值。CAN控制器检测总线错误原理如图2所示:
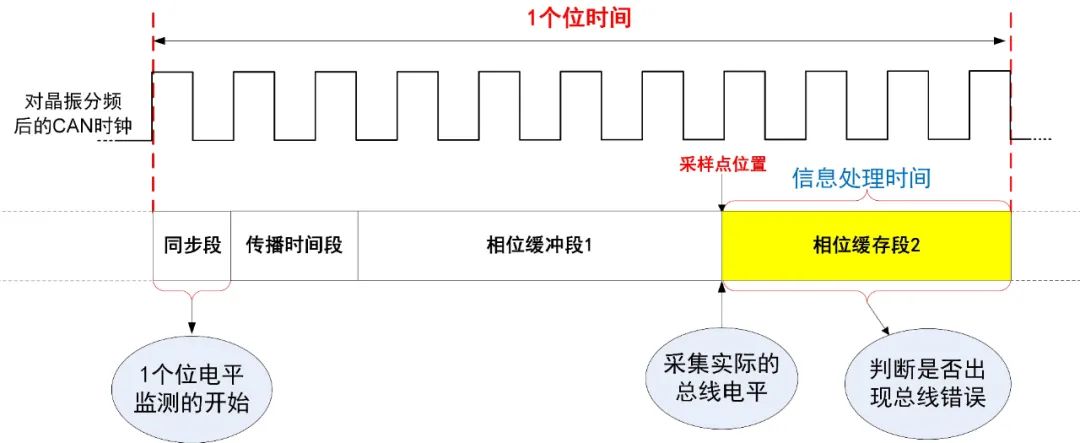
图2 监测总线错误原理图
如图2描述,CAN控制器监测一个总线电平的电平值是在采样点位置进行的,判断是否出现错误是在信息处理时间内完成的。
综上所述,CAN控制器对错误的识别可概括为:无论是作为发送器还是接收器,在采样点位置成功监测到当前总线的实际电平值后,CAN控制器便按照CAN规范中描述的错误管理规则判断是否出现错误。
CAN通信过程中的错误类型包括5种,分别是:位错误、填充错误、CRC错误、帧格式错误、应答错误。接下来分别对5种错误的检测识别过程进行解析。
1、位错误
位错误是由作为发送器的节点在发送报文期间进行检测识别的。CAN控制器的程序逻辑发送的电平与监测到总线的实际信号不一致即在此位期间检测到位错误。
例外情况,在仲裁场或应答间隙期间发送一“隐性”位却监视到一“显性”位,以及当发送器发送一个被动错误标志但检测到“显性”位时,均也不被视为位错误,以实现特定的功能。
2、填充错误
在CAN帧的位场中,帧起始、仲裁场、控制场、数据场以及CRC序列,均通过位填充的方法编码。无论何时,发送器只要检测到这些位场对应位流里有5个连续相同值的位,便自动在接着的下一位插入一个补码位。CAN控制器在监测总线电平值的同时对连续相同的位电平值会进行计数,如果在使用位填充法进行编码的信息中,出现了第6个连续相同的位电平值时,便检测到一个填充错误。
3、CRC错误
CRC错误是由作为接收器的节点进行检测识别的。CRC序列共15位(不包含填充位),其内容由帧起始、仲裁场、控制场、数据场(如果有)的无填充位流计算而来。
CRC序列计算使用CAN规范规定的方法。作为发送器的节点发送CAN报文时CRC序列由规定的计算方法确定,作为接收器的节点从总线上接收完数据场最后一个数据位(没有数据场时是接收完控制场的最后一个位)后,如果接下来接收到实际的CRC序列与接收器的计算结果不一致,便检测到CRC错误。
4、格式错误
节点无论是作为发送器的还是作为接收器均可在监测报文期间检测识别格式错误。由于CAN通信严格按照CAN规范定义的帧格式进行报文封装传输,CAN控制器在监测总线电平位时明确知道当前位、后续位属于帧格式中哪个位场,以及属于位场的第几个位,当接收到一个属于帧格式固定形式的位时,如果实际电平值与帧格式定义不一致,则检测到一个格式错误。
例外情况,对于接收器来说,帧结束最后的位被置于“不重要”状态,监测到的帧结束最后一位期间的显性位不被当作帧错误。
5、应答错误应答错误是由作为发送器的节点检测识别的。在发送报文时,只要在发送应答间隙(隐性)期间所监测到的位不为“显性”,则发送器会检测到一个应答错误。
注:
1、上述5种错误不会相互排斥,也就是说CAN帧中的某个错误有可能同属一种以上的错误类型。
2、如上所述,作为发送器或接收器的不同角色时,直接能检测到的错误类型是不一样的。
节点如何响应错误?
CAN规范中规定每个CAN控制器中实现一个发送错误计数器和一个接收错误计数器。根据计数值不同,节点会处于不同的节点状态,并根据计数值的变化进行状态转换,状态转换如图3所示。
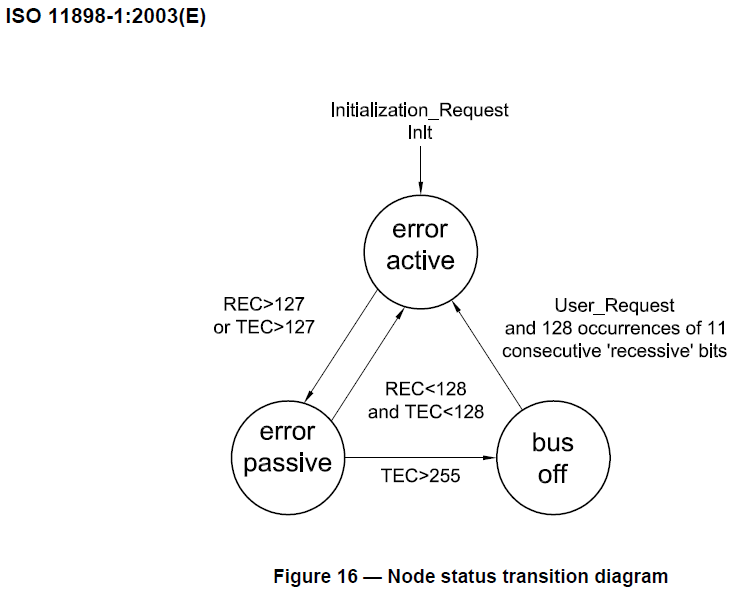
图3 节点转态转换图
当CAN控制器检测到总线错误后通过发送错误标志指示错误。对于“错误主动”的节点,错误标志表现为“主动错误标志”,对于“错误被动”的节点,错误标志表现为“被动错误标志”。
无论检测到位错误、填充错误、帧格式错误、还是应答错误,CAN控制器会在紧邻的下一位发送错误标志。如果检测到的错误类型是CRC错误,错误标志的发送开始于ACK定界符之后的位,即帧结尾。
综上所述,CAN控制器对错误的响应可概括为:根据当前的节点状态在位流序列相应的位置用错误标志标示错误,并按照CAN规范更新错误计数值,进行节点状态转换。并且是每成功监测到一次错误便进行一次响应。
注:
1、由于篇幅有限,关于错误计数的详细规则、节点状态转换以及错误帧格式等细节均不在本文进行讨论,请读者查阅CAN协议规范。
2、上述分析可知道,错误响应的关键要素包括错误标志的类型和响应的位置。
错误管理机制的作用
错误管理机制的作用主要体现在对错误的响应过程。
作为发送器发送错误标志时,无论“主动错误”还是“被动错误”都必然包括6个连续同极性的位,使其他节点也识别到总线错误,进而使所有节点都能丢弃当前出错的帧。
作为接收器发送错误标志时,“主动错误”标志使其他节点也识别到总线错误从而使所有节点(包括作为发送器的节点)都能丢弃当前出错的帧;“被动错误”标志不影响总线通信从而使其他节点都能成功接收当前帧,处于“被动错误”状态的节点属于“不可信”状态,其检测到错误仅是自己丢弃当前帧,这也是错误管理的灵活性所在,即错误响应并不是严格在任何情况下都使所有节点丢弃同一帧报文。
综上所述,错误管理机制可以使所有的节点同时接收或丢弃总线的同一帧报文,又可以使作为接收器的被动错误状态的节点仅自己丢弃当前报文而不影响其他节点。因此,错误管理是实现CAN通信数据一致性的机制之一。
总结
CAN节点错误管理功能是由CAN节点组成中的CAN控制器负责的,对错误管理的工作过程可以从“错误识别”和“错误响应”两个方面进行理解。错误管理是实现CAN通信数据的一致性的机制之一。
ZPS-CANFD是致远电子总线分析仪第二代CAN总线开发辅助工具,适用于CANFD、CAN、LIN总线的测量及测试仪器,支持总线数据的发送和接收,高层协议解析及诊断,能对CANFD、CAN总线物理层电气信号实时采集和记录,并附带有高速模拟通道、通用数字IO及模拟IO,通过提供的硬件接口及软件功能,用户能够便捷地构建总线信号测量与分析、节点功能仿真及测试、网络可靠性诊断及评估的自动化系统。ZPS-CANFD可实现CAN/CANFD报文和波形的同步监测,可以直观的定位排查节点错误问题,以及更高效的错误干扰等模拟测试。
编辑:jq
-
mcu
+关注
关注
146文章
16977浏览量
350215 -
计数器
+关注
关注
32文章
2253浏览量
94339 -
发送器
+关注
关注
1文章
258浏览量
26793 -
CAN控制器
+关注
关注
3文章
74浏览量
15014
原文标题:【原理解析】一文读懂CAN节点错误管理机制
文章出处:【微信号:ZLG_zhiyuan,微信公众号:ZLG致远电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
CAN总线错误状态的种类

康谋分享 | ADTF在CAN方面技术的深入探讨

一文读懂CAN通讯错误帧

虹科培训 | CiA协会CAN总线实训开班,新一代CAN网络CAN XL

CAN-bus应用笔记:节点篇
9个Can节点中一个节点错误引发的巨大问题求解
深入理解Java 8内存管理机制及故障排查实战指南
CAN数据传输错误的常见原因有哪些?
深入探讨电源变压器在储能设备中的应用
CAN总线最大能够带多少节点?CANFD相对于CAN2.0有哪些差异呢?
详解zookeeper的session管理机制






 工商网监
工商网监
评论