 为什么自动驾驶车辆难识别白色大卡车
为什么自动驾驶车辆难识别白色大卡车
蘑菇说:人类驾驶员可以轻轻松松辨别前方的白色大货车和远方的云朵,但这一简单的场景或许会难倒一辆“武装到牙齿”的自动驾驶汽车。判断错误的后果很可能是一场车祸。
迄今为止,没有人造系统可以媲美人类眼睛及大脑的图像处理能力。工程师们尝试在自动驾驶车辆上安装多种配置,尽可能地让车辆准确感知外部环境。
在自动驾驶车辆的传感系统中,摄像头、超声波探测器(即俗称的“倒车雷达”)、毫米波雷达是最常见的几个配置。
只采用摄像头等几种常见传感器可能并不那么靠谱,起码现阶段是这样。智能网联车辆通过摄像头拍摄的二维图片来识别周围的环境,这背后需要算法支撑,算法像是人类的大脑。
这套系统不能保证100%正确识别,比如对于各种“没见过”的事物,车辆可能会“大脑一片空白”。如果车辆所处的环境太亮、太暗、太复杂,系统同样可能会识别错误。
一个穿着布偶服装的行人,一辆夸张的改装车,甚至一辆普普通通的白色大卡车都可能让车辆产生错误判断。
据不完全统计,全球范围内已经发生过多起智能网联汽车撞上白色大卡车的事故,其中一些案例中车辆开启了L2级自动驾驶辅助系统,但其并没能拯救走神的司机。
曾经有网友做过一个有意思的实验,把一张白色卡车的图片导入Photoshop,采用快速选择工具,把白色卡车的轮廓勾选出来,得到的结果是,有一大片白云也被划入了勾选框。在Photoshop看来,白色货厢和天空是一样的。
你当然可以手动把白色卡车从选区中除去,就像在自动驾驶通用算法的基础上叠加一层更复杂的算法,但过程非常繁琐。在自动驾驶感知系统时时刻刻被高频大量的图像识别需求“轰炸”下,算法大概率只能将图像中若隐若现的白色卡车过滤掉了。
目前业内正在通过持续优化算法、布置更多摄像头形成立体视觉等措施帮助算法认识白色卡车。目前这些技术仍处试验阶段。
与摄像头共担大任的雷达传感器们也有各自的“苦衷”。
首先,用于倒车测距的超声波雷达对于中远距离检测相当无力。
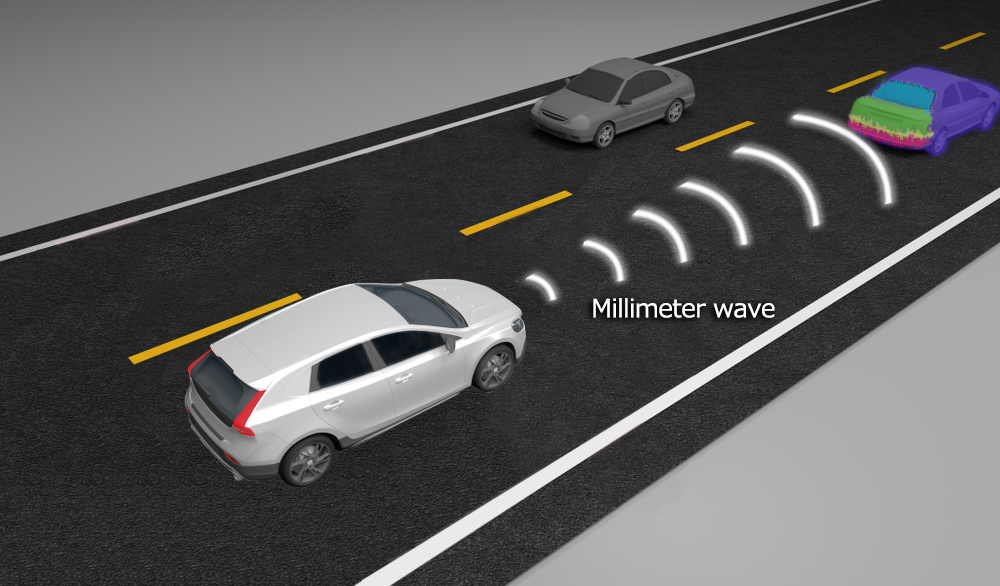
毫米波雷达倒是适用于长距离探测,理应能探测到远处的白色卡车。但卡车的底盘常常离地间隙非常大,尤其是半挂式卡车。一部分毫米波很容易直接从箱底穿过,形成漏检。
毫米波雷达对于缓行过马路的卡车也缺少敏感性。这是由于毫米波雷达需要排除路面桥墩、隔离栏等静止物体造成的干扰,这被称为“静态杂波滤除”。这个过程中,它很可能将停在远处或缓慢过马路的白色卡车也过滤掉了。
事实上,多数由白色卡车造成的自动驾驶事故中,确实有不少卡车在事故前处于侧翻静止状态。
图像传感器和依赖电磁波的传感器不擅长的,却难不倒激光雷达。激光雷达采用激光探测及测距技术来构建车辆所处的三维图像。这意味着激光雷达对于障碍物的距离和3D轮廓感知更精准。
但激光雷达摆脱不了天然的物理感知距离极限。
假设一个激光雷达垂直角分辨率是0.3度(雷达发射光束相邻两个点之间的夹角),它对百米外一位身高1.7米左右的成年人的识别点不超过6个。这就很难准确勾勒出物体的轮廓。更不用说体型庞大、奇异的各种半挂卡车了。
“摄像头+电磁波传感器+激光雷达传感器”互补确实能满足99.99%的驾驶场景,但总会有白色卡车(有时还侧翻)这种罕见的情况。
那么,如果让白色卡车直接告诉自动驾驶汽车,让后者提前知道这里存在一辆占据了两个车道的异型车,问题是不是就迎刃而解了呢?
一些自动驾驶公司正尝试借助车路协同技术(V2X)中的车车直连通信,帮助车辆及时、准确获取中远距离信息。
在实际应用中,蘑菇车联走得更远。其“车路云一体化”的自动驾驶系统不仅有车车直连,还有200米外的路侧预警以及云端数公里外的远距离信息预警。这一方案理应为未来的自动驾驶大规模落地带来更多安全性。
责任编辑:haq
-
传感器
+关注
关注
2553文章
51511浏览量
757288 -
摄像头
+关注
关注
60文章
4872浏览量
96497 -
自动驾驶
+关注
关注
785文章
13954浏览量
167262
原文标题:蘑菇说第九期 | 自动驾驶车辆为何害怕白色大卡车?
文章出处:【微信号:moguzhixingmogo,微信公众号:蘑菇车联】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
沃尔沃与Waabi携手开发自动驾驶卡车
沃尔沃将与人工智能企业Waabi合作开发自动驾驶卡车

小马智行获准开展自动驾驶卡车编队无人化测试
FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?
自动驾驶汽车如何识别障碍物
卡尔动力获准在北京开展L4级自动驾驶卡车编队道路测试
小马智行再获自动驾驶卡车编队测试许可
小马智行获准开展双城卡车编队自动驾驶测试!
迎来“CASE”时代的汽车趋势和技术课题(3) ~自动驾驶和识别引擎~
戴姆勒和Torc加大自动驾驶卡车研发力度






 工商网监
工商网监
评论