 超声波流速传感器的分类与原理
超声波流速传感器的分类与原理
超声波的概念
从物理学的角度来看,声波属于声音的类别,是机械波中的一种,人类能听见的声波,频率范围为16Hz至20KHz。若声波的频率低于16Hz时就叫做次声波,如果高于20KHz,我们则称为超声波声波。超声波因为其最低频率大约等于人的最高听觉频率而得名。超声波方向性能好,穿透能力强,易于获得较集中的声能,在水中传播距离远,可用于测量距离和速度、清洗、焊接、碎石、杀菌消毒等。声波按原理划分,可以分为检测超声和功率超声。在医学、军事、工农业上有很多的应用,声波是物体作机械振动,传播能量的一种形式,所谓振动是指物质的质点在其平衡位置附近进行的往返运动。
比如,鼓面经敲击后,鼓面上下振动,振动状态通过空气,液体或者固体向周围传播,就产生声波。高于20KHZ频率的声波,人类是听不见的,人们把其叫做超声。超声和可听见声其实是是一致的,它们的主要特点都是一种机械振动,是能量的传播形式。不同点是超声频率高,波长短,在一定范围内,直线传播具有优良的束射性和方向性,目前腹部超声成象所用的频率范围在 2MHZ到5MHz之间,最常用的为3NHZ到3.5MHz(质点每秒振动1次为1Hz,1MHz=10^6Hz,即每秒振动达100万次)
超声波的特性
1、超声波在液体中传播时,在界面上能产生强烈的冲击和空化现象。
2、超声波可以在气体、液体、固体、固熔体等介质中有效传播。
3、超声波会产生反射、干涉、叠加和共振现象。
4、声波可传播较强的能量。
超声波效应的利用
超声检验
超声波频率高波长短,具有较好的方向性,能穿透不透明物质,超声波探伤、测厚、测距、遥控和超声成像技术就是利用这一特性而做成。超声成像是利用超声波呈现不透明物内部形象的技术 。把从换能器发出的超声波经声透镜聚焦在不透明试样上,从试样透出的超声波携带了被照部位的信息(如对声波的反射、吸收和散射的能力),经声透镜汇聚在压电接收器上,所得电信号输入放大器,利用扫描系统可把不透明试样的形象显示在荧光屏上。上述装置称为超声显微镜。超声成像技术已在医疗检查方面获得普遍应用,在微电子器件制造业中用来对大规模集成电路进行检查,在材料科学中用来显示合金中不同组分的区域和晶粒间界等。
声全息术是利用超声波的干涉原理记录和重现不透明物的立体图像的声成像技术,其原理与光波的全息术基本相同,只是记录手段不同而已(见全息术)。用同一超声信号源激励两个放置在液体中的换能器,它们分别发射两束相干的超声波:一束透过被研究的物体后成为物波,另一束作为参考波。物波和参考波在液面上相干叠加形成声全息图,用激光束照射声全息图,利用激光在声全息图上反射时产生的衍射效应而获得物的重现像,通常用摄像机和电视机作实时观察。
超声处理
利用超声的机械作用、空化作用、热效应和化学效应,可进行超声焊接、钻孔、固体的粉碎、乳化 、脱气、除尘、去锅垢、清洗、灭菌、促进化学反应和进行生物学研究等,在工矿业、农业、医疗等各个部门获得了广泛应用。
超声流量流速传感器中的应用
超声波传感器利用超声波检测技术,将检测到的超声波转化为电信号的传感器,一般分为两类:
第一类是利用流速的变化的时间差法,频率差法,相位差法,其基本原理都是通过检测超声波在顺逆流的液体中的传播时差来反映流速所以又称之为传播速度差法。时差法和频差法消除了温度对检测的影响,测量精度高,广泛被使用;
第二类是利用超声波随流速而发生偏移,而反映的流速,称之为多普勒超声波流速法。向明渠的液体中发射超声波,超声波在流动的液体中载上流速,再用接收探头也就是换能器将信息传送到微处理器上进行数据处理,最后得到流速。
超声波传感器是非接触测量仪器,不阻碍液体的流动,具有很高的测量精度。
超声波流速传感器的分类与原理
多普勒法的原理
多普勒频移法的原理是基于声波的多普勒原理,当声源与接收器发生相对运动时,接收器接收到的声波频率会随之发生频率变化。当声源产生的波(声波、电磁波、光波等)向接收方向传播时,接收者接收波的频率会增大;当波源背离接收者的方向传播时,接收者接收波的频率会减小。当观察者相当于声源有相同的移动时,同样可以得出这种现象。这种现象被称为多普勒效应。由于在明渠流体中含有固体颗粒,固体颗粒可以反射超声波,超声波的频率随着水流的流动产生相对接收者不同的频率声波,通过对频率与流速之间的关系,从而获取流速。
直接时差法原理以及算法改正
为流速方向和超声波传播方向的夹角,当 为锐角时,称之为顺流;当 为钝角时,称之为逆流。超声波信号在动态介质(流体)中,与静态介质(流速为零)相比,顺流时信号传播速度增加,传播时间减小,同样逆流时超声波信号传播速度减小,传播时间增加,从而顺逆流方向超声波信号传播时间存在一个差值(即时差)。利用超声波在横向穿过流动的液体时, 在其顺流和逆流介质中, 其超声波的速度有差异而形成速度差( 时间差) 。图中,A和B分别为两个超声波换能器,V 为液体流速,H为明渠宽度,θ 超声波进入液体的入射角。t1 为换能器A 发射、B 接收时,超声波在明渠中传播时间,即顺流时间;t2 为换能器 A,B接受时,超声波在明渠中传播时间,即逆流时间。
具体方法如下:当从A 到B 顺流发射超声波时,声波基本上顺流传播,速度快时间短,其传播时间为:
t1 = L /( c +v*cos)
当从B 到A 逆流发射超声波时,逆流传播、速度慢、时间长,即:
t2 = L /( c - v*cosθ)
式中: L 为2 个换能器之间的距离; c 为超声波在静止的流体中的流速; v 为被测流体的平均流速; θ 为2 个超声波换能器线与管道所夹的锐角。
两种方向传播的时间差Δt 为:
Δt = t2 - t1 = 2Lvcosθ /( c2 - v2 cos2 θ)
由于v << c,v2 cos2 θ 可忽略,故有Δt = t2 - t1 = 2Lvcosθ /c2
即v = c2Δt /( 2Lcosθ
L=
当流体中声速c 为常数时,流体的流速v 与Δt 成正比,测出时间差即可以求出流速v,进而得到流量。值得注意的是,一般液体中声速往往是在1 500 m/s 左右,而流体流速只有每秒几米,如要求流速测量的精度达到1%,则对声速测量的精度需为
 ~
~ 数量级,这是难以做到的,更何况声速受温度的影响不易被忽略,所以该方法不易实现流量的精确测量。文中提出另一种测量方法,速差法,可以有效解决以上问题。
数量级,这是难以做到的,更何况声速受温度的影响不易被忽略,所以该方法不易实现流量的精确测量。文中提出另一种测量方法,速差法,可以有效解决以上问题。
速差法测流量的测量原理为: 当从A 到B 顺流发射超声波时,
c + v*cosθ = L /t1
从B 到A 逆流发射超声波时,
c - v*cosθ = L /t2( 7)
因此2vcosθ = L /t1 - L /t2 = L( t2 - t1) /( t1 t2)
设顺流和逆流的时间差为Δt = t2 - t1,所以
v = LΔt /[2t1( Δt + t1 cosθ
由上式可见,流体的流速v 与声速c 没有直接关系,从而避免了测声速c 的困难,同时这种方法还不受温度的影响,容易得到可靠的数据。
频率差法
频率差法是在相位法和直接差法的基础上发展起来的被测流体内有两个通道,顺流和逆流通道,一个通道顺流发射超声波,另一个逆流发射超声波。
顺流发生超声波时,接收到的超声波频率既 ;
;
逆流发射超声波时,接收到的超声波频率既 ;
;
频率差 ,
,
明渠流速 。
。
频率差法测流速公式中不含超声波速度C,故受温度的影响小,测量效果比相位法精确。
超声波传感器的优缺点
适用频率范围小
现在的超声波传感器频率都相对固定,例如40KHz的传感器,只能用在38-42KHz上。目前几乎见不到频域范围广的传感器,例如40KHz~500KHz这样的产品。
驱动电压高
超声波传感器驱动电压一般在100Vp-p到1500Vp-p之间,在很多低压设备上需要脉冲变压器升压,这样会带来一些不必要的麻烦。减小超声波传感器的适用范围。
灵敏度小
主要由于超声波传感器多采用压电陶瓷材料的原因,其材料的限制导致了灵敏度无法达到其他传感器的精确灵敏度。
适用距离范围小
由于超声波频率高所以在介质中传播时衰减快,所以超声波传感器的传播距离较短,无法达到
超声波传感器在其他领域的应用
超声波位置传感器
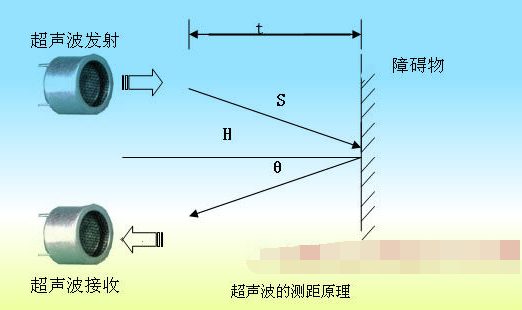
超声波位置传感器采用超声波回波测位原理,运用时差测量技术,检测传感器与目标之间的距离,采用小角度、小盲区超声波传感器,具有测量准确、无接触、防水、防腐蚀、成本低等优点,主要应用于液位、物位、料位检测等。
超声波位置传感器的基本原理是:系统由发射传感器发出超声波脉冲,传到被测物体经反射后返回接收传感器,测出超声波脉冲从发射到接收所需的时间,再根据介质中的声速,就能得到从传感器到被测物体之间的距离,从而确定位置。考虑到环境温度对超声波传播速度的影响,通过温度补偿的方法对传播速度予以校正,以提高测量精度。计算公式为
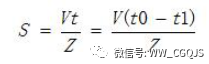
式中:s为被测距离;为发射超声波脉冲与接收其回波的时间差;为超声回波接收时刻;幻为超声脉冲发射时刻。利用MCU的捕获功能可以很方便地测量t时刻和to时刻,根据公式,计算可得到被测距离S。
超声波传感器探伤
对高频超声波,由于它的波长短,不易产生绕射,碰到杂质或分界面就会有明显的反射,而且方向性好,能成为射线而定向传播;在液体、固体中衰减小,穿透本领大。这些特性使得超声波成为无损探伤方面的重要工具。
1、穿透法探伤
穿透法探伤是根据超声波穿透工件后的能量变化状况,来判别工件内部质量的方法。穿透法用两个超声波传感器探头,置于工件相对面,一个发射超声波,一个接收超声波。发射波可以是连续波,也可以是脉冲波。在探测中,当工件内无缺陷时,接收能量大,仪表指示值大;当工件内有缺陷时,因部分能量被反射,接收能量小,仪表指示值小。根据这个变化,就可以把工件内部缺陷检测出来。
反射法探伤
反射法探伤是以超声波在工件中反射情况的不同,来探测缺陷的方法。下面以纵波一次脉冲反射为例,说明检测原理。
高频脉冲发生器产生的脉冲(发射波)加在超声波传感器探头上,激励压电晶体振荡,使之产生超声波。超声波以一定的速度向工件内部传播。一部分超声波遇到缺陷F时反射回来;另一部分超声波继续传至工件底面B,也反射回来。由缺陷及底面反射回来的超声波被探头接收时,又变为电脉冲。发射波f、缺陷波F及底波经放大后,在显示器荧光屏上显示出来。
荧光屏上的水平亮线为扫描线(时间基准),其长度与时间成正比。由发射波、缺陷波及底波在扫描线的位置,可求出缺陷的位置。由缺陷波的幅度,可判断缺陷大小;由缺陷波的形状,可分析缺陷的性质。当缺陷面积大于声束截面时,声波全部由缺陷处反射回来,荧光屏上只有T、F波,没有B波。当工件无缺陷时,荧光屏上只有T、B波,没有F波。
超声波探伤的优点是检测厚度大、灵敏度高、速度快、成本低、对人体无害,能对缺陷进行定位和定量。然而,超声波探伤对缺陷的显示不直观,探伤技术难度大,容易受到主、客观因素的影响,以及探伤结果不便保存等,使超声波探伤也有其局限性。
责任编辑:haq
-
传感器
+关注
关注
2548文章
50664浏览量
751895 -
超声波
+关注
关注
63文章
2989浏览量
138220
原文标题:深度解读超声波流速传感器
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论