 剖析多节锂电池充电管理方案-TPS54201在扫地机器人的应用
剖析多节锂电池充电管理方案-TPS54201在扫地机器人的应用
Other Parts Discussed in Post: TPS54201
作者: Stone Zeng (South China Mass Market)
随着智能家居的流行,扫地机器人成为了年轻的都市白领的新宠,已经晋升为家庭必备家电三小件之一。 扫地机器人不仅可以完成琐碎的扫地工作,还可以自动回充,通常使用4节锂电池串联供电。目前市面上扫地机的充电管理大多采用分立方案实现,如图1所示,MCU实时采样电池的充电电压和充电电流,输出PWM经电平转换控制MOS实现闭环控制。由于MCU资源有限,开关频率通常在50K赫兹以下,外围器件多且功率电感体积大,此外,分立方案没有过流,短路保护功能。
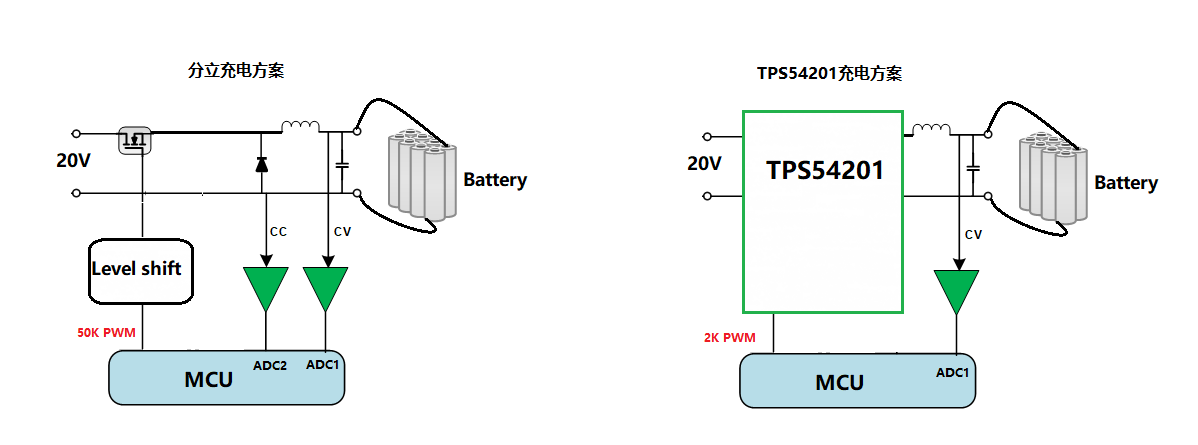
图1 分立方案VS TPS54201-锂电池充电管理
TPS54201 是一款输入电压范围为 4.5V 至 28V 的 1.5A 恒流驱动器,通过控制PWM 引脚调节电流。在SOT23-6封装内集成 150mΩ 和 70mΩ MOSFET,可实现高达95%的转换效率。如图2 所示,通过MCU采样电池电压,输出PWM控制TPS54201的充电电流,仅需4.7uH电感和极少的外围元件就可以组成一个完整的锂电池充电管理方案。 充电电流可达1.5A,支持1~6节锂离子电池,同时也支持磷酸铁锂电池。与分立方案相比,TPS54201充电方案不再需要电平转换电路,电流采样电路,MOS管和整流二极管,同时集成了过流短路保护功能。
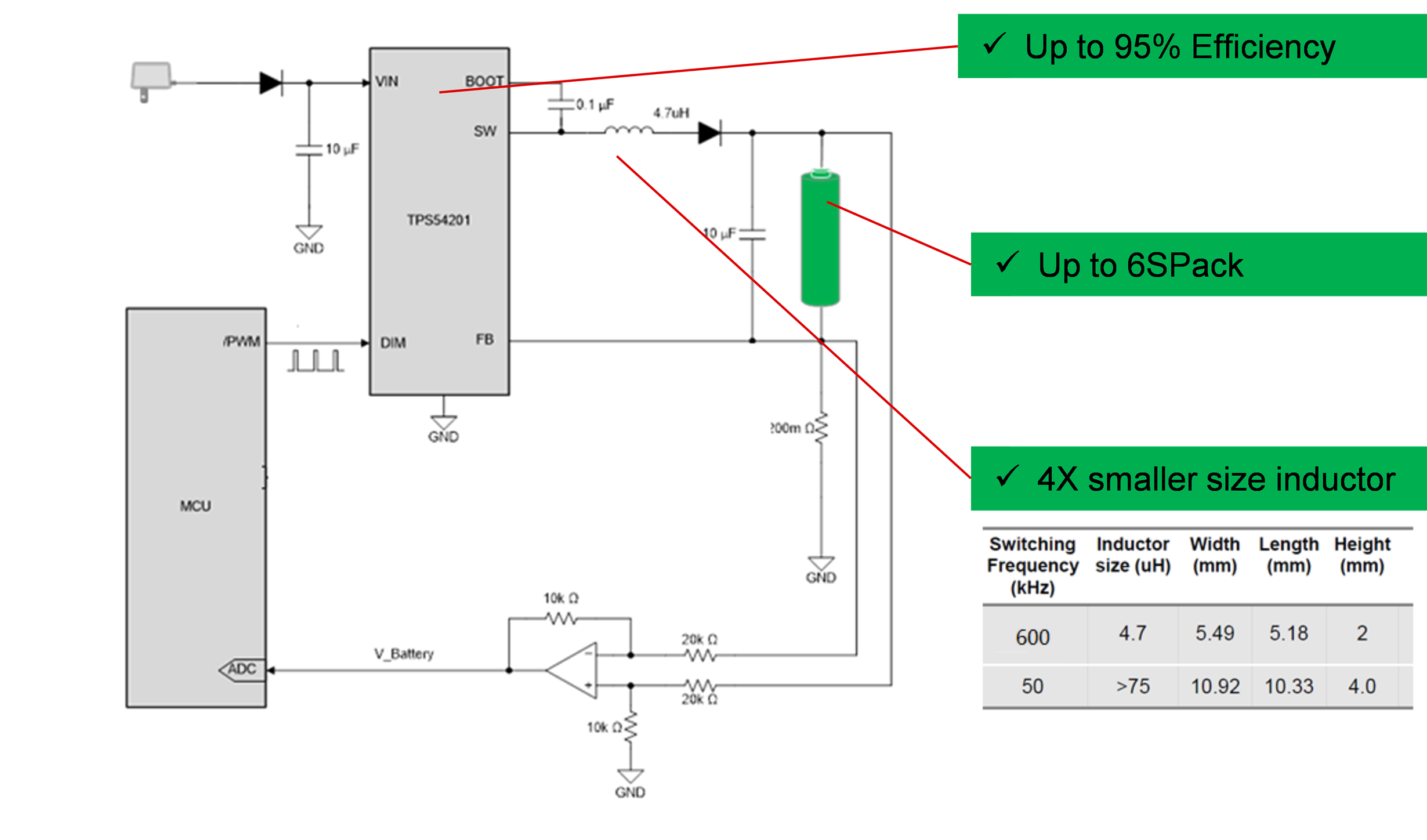
图2 基于TPS54201多节锂电池充电方案
为了更好的保护锂电池,一般要求充电过程按涓流充电(低压预充)、恒流充电、恒压充电以及充电截至四个阶段。图3是TPS54201的充电管理流程图,以四节锂电池为例,当适配器插入后,初始的PWM占空比D_PWM=0,当MCU 检测到电池电压小于12.8V, 设定D_PWM=10%, 进入预充阶段,此时的充电电流是额定电流的10%。当电池电压上升并达到12.8V后,设定D_PWM=100%,进入恒流充电阶段,充电电流上升至额定电流。随着充电电压上升并达到额定电压16.8V时,进入恒压充电阶段,以1%为步长(step),逐步减少D_PWM,保持电池电压接近额定电压16.8V。最后D_PWM减少至10%时,充电电流等于截至电流(通常为10%的额定充电电流),设定D_PWM=0%, 充电截至。
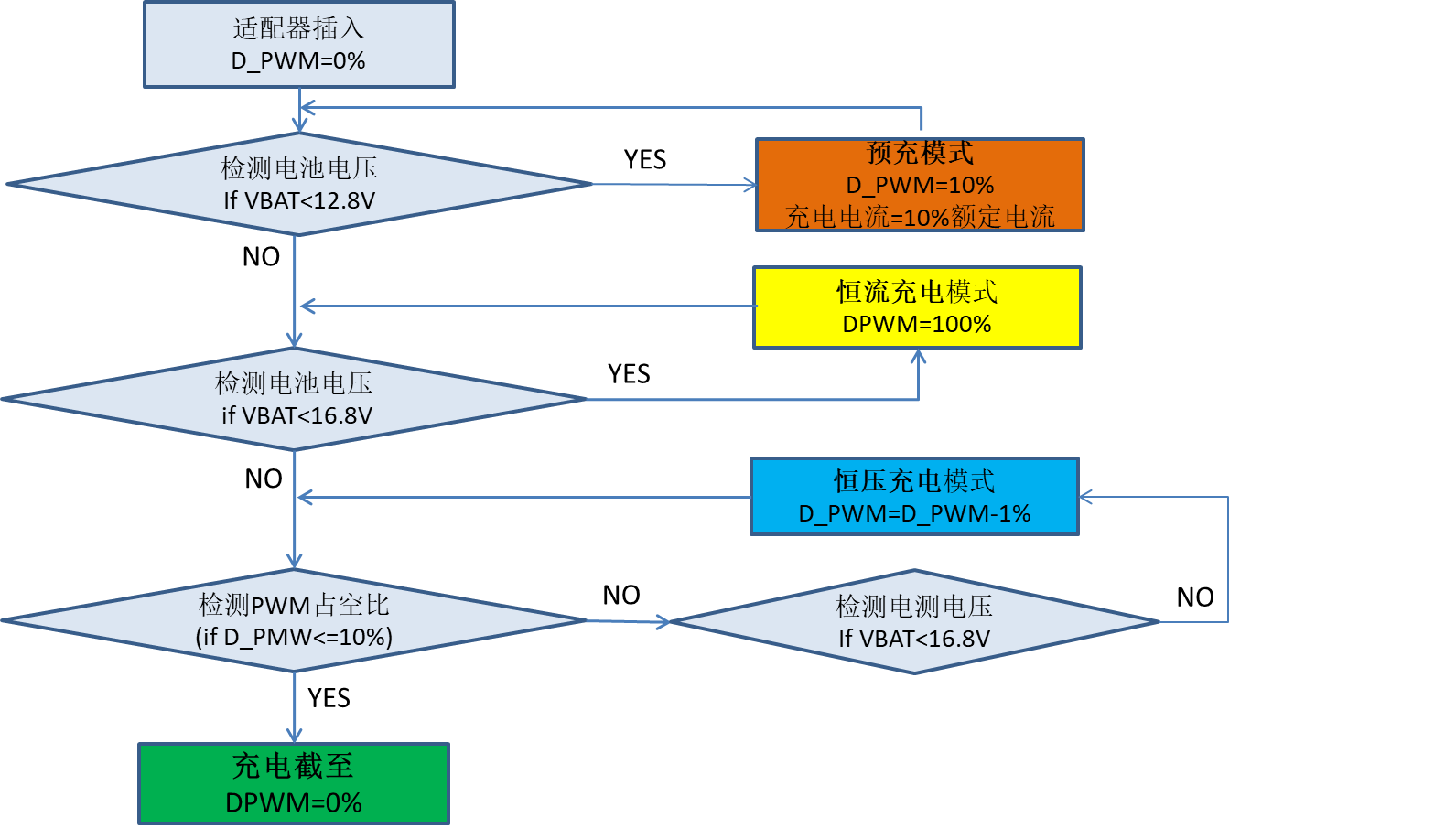
图3 TPS54201充电管理流程图
总的来说,TPS54201充电方案外围器件少,控制逻辑简单,集成过流和短路保护,最高支持6节电池及1.5A充电电流,非常适合在扫地机中应用,也适用于其他成本敏感型应用。
审核编辑:金巧
-
锂电池
+关注
关注
260文章
8124浏览量
170419 -
电源管理
+关注
关注
115文章
6183浏览量
144569 -
电池
+关注
关注
84文章
10588浏览量
129952 -
扫地机器人
+关注
关注
20文章
789浏览量
53484
发布评论请先 登录
相关推荐
智能扫地机器人的工作原理和构成
霍尔元件在扫地机器人中的应用
扫地机器人应用解决方案
霍尔开关在扫地机器人中的应用
扫地机器人的核心技术突破
扫地机器人避障技术的发展史
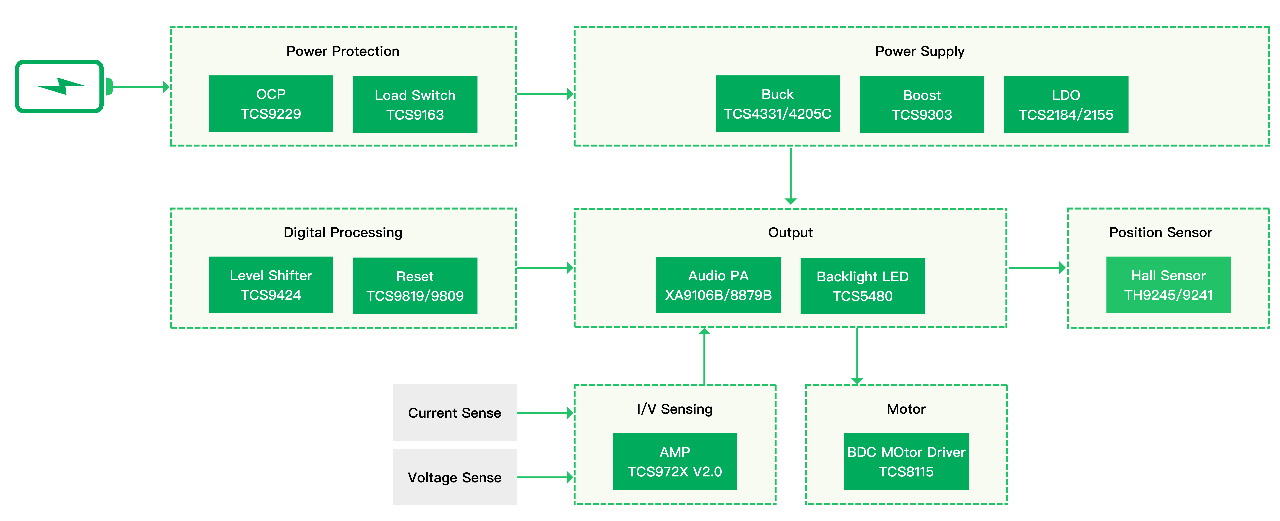
汤诚科技推出扫地机器人、洗地机应用方案,为品质生活添彩
供应 英集芯IP2348,适用于扫地机器人解决方案的锂电池同步降压充电芯片

光耦知识分享‖探讨光耦技术在扫地机器人的应用

其利天下技术·搭载无刷电机的扫地机器人的前景如何?
扫地机器人CCC认证申请流程与其他产品的区别是什么?






 工商网监
工商网监
评论