 扫地机器人设计挑战
扫地机器人设计挑战
随着世界变得越来越自动化,使用常规立式吸尘器清洁房屋感觉苦不堪言。自 2002 年首台扫地机器人上市以来,清洁机器人的功能和可用选项大幅增加。事实上,许多优质机器人真空吸尘器目前已进入第六代。
推动这一变化的因素- 无论是比喻含义还是字面含义 - 是使您的现代扫地机器人流畅运行的一个器件 - 电机驱动。如同今天的家用机器人助手一样,电驱动的尺寸持续缩小,同时性能也在提高。
在本文中,我将回顾真空机器人的主要特点和当前趋势,以及电机驱动如何帮助满足这些要求。
展望未来,预计真空机器人将变得不那么笨拙(换言之,不那么容易迷失方向)且运行更快。设计尺寸也将继续缩小,使他们能够清洁诸如厨柜或低间隙家具之类的狭窄部位。
扫地机器人设计挑战
电池寿命和可靠性是真空机器人面临的两大设计挑战。大多数扫地机器人都是电池供电的,并从电源座充电。扫地机器人的典型框图如图 1 所示。
电机是扫地机器人的重要组成部分。如何驱动电机以及使用何种电机驱动决定电池寿命和可靠性。
让我们回顾一下控制扫地机器人消耗的大部分功率的主要系统模块、所涉及的主电机,以及确定哪种电机驱动将控制并降低功耗的系统要求:
扫地机器人的主吸力是通过一个运行在 3 到 4A 的电机来完成的,通常具有高达8A的峰值电流。效率和全面保护是关键要求。该电机通常由无刷电机驱动进行驱动,以降低噪音并提高效率。
两个双向轮使用有刷电机驱动。早期型号只能向一个方向移动,但双向轮在解锁机器人或使其从困难的位置改变方向时非常有用。这些是低速电机,带典 <1A 的典型均方根(RMS)额定电流。与光滑的瓷砖或硬木地板相比,需要更好的扭矩在诸如地毯等更粗糙的地板类型移动。另一个关键要求是监控输出电流,且如果电流持续较长时间,则向微控制器(MCU)发送反馈,这可能表明真空机器人卡住了。
主刷使用位于扫地机器人中心的有刷电机,用于搅动和拉动地板上的污垢。这是一款中速电机,额定RMS电流约为3A。
取决于扫地机器人和品牌的类型,可能有一个或两个单向侧刷以中速运行。这些侧刷通过向内朝向机器人的中心旋转而将污垢驱动到主刷上。RMS电流额定值 <1A。
我提及的大多数电机都是有刷电机,RMS电流额定值从 1A 到 3A 不等,
在前几代扫地机器人中,跨分流电阻的外部电流感应处理输出电流的监测和感应。这些分流电阻器体积大,价格昂贵,占用了电路板上的大量空间。使用外接笨重的高值分流电阻也会增加功耗,从而减少机器人的电池使用时间。
图3所示为早期一代扫地机器人的框图,其中DRV8870需要外部分流电阻来感应电流,而外部放大器则需要向MCU发送反馈。这需要额外的电路板空间,增加成本,并增加了布线复杂性和维护。
将DRV8870替换为DRV8874或DRV8876无需感应电阻和放大器,因为电流感应反馈在内部发生,如图 2 所示。
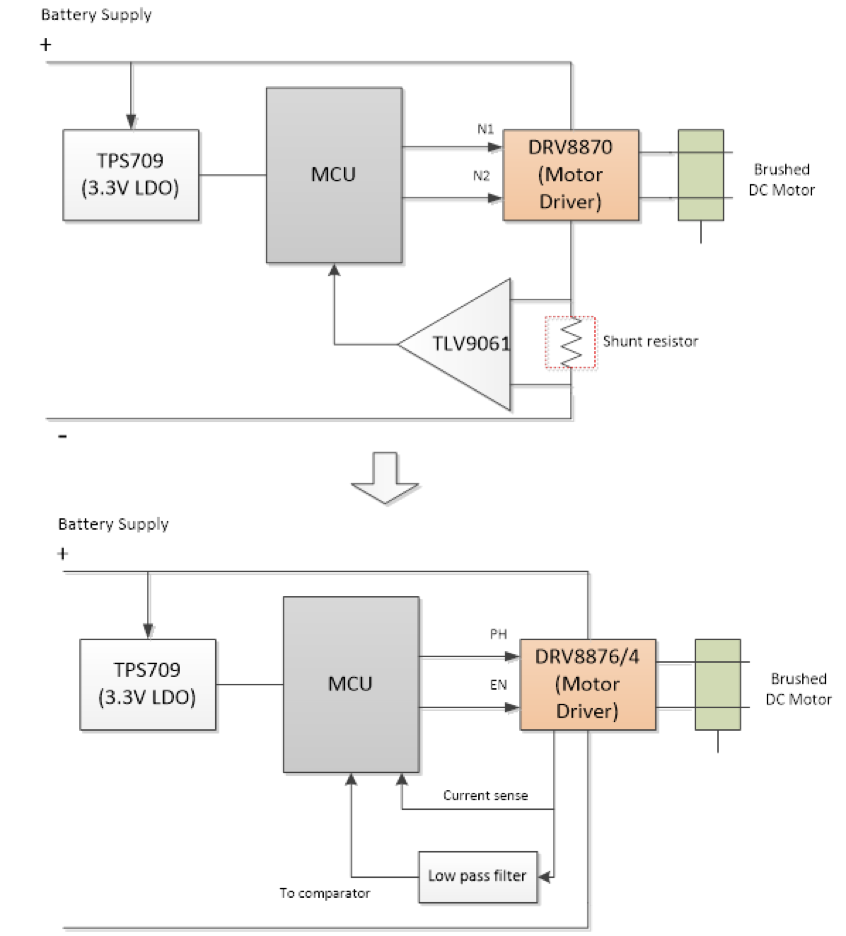
图2:驱动双向电机,将 DRV8870 替换为 DRV8874 或 DRV8876 的示例
图 3 所示为 DRV8870 和 DRV8876 之间分流电阻尺寸的减小。
如果电机需要为双向型(如在车轮或主刷电机中),则驱动需要两个输入(N1和N2),以使用两个MCU管脚驱动电机。
扫地机器人还具有单向侧刷。使用单向驱动时,DRV8874或DRV8876只需要一个输入管脚(EN管脚),从而减少 MCU 引脚,如图 4 所示。
DRV8874 和 DRV8876 具有多种优势,可延长电池寿命和可靠性。集成电流感应无需外接分流电阻器,节省了材料成本和空间,同时显著减少了设计工作量。
电流感应的增加也无需用于反馈的外接增益放大器。这些器件的低睡眠电流和无庞大的分流电阻有助于降低功耗并延长真空机器人的电池寿命,而内部电流感应可实现主动失速监控,以确定电机是否卡在某个位置,或者是否有车轮老化或磨损。要了解有关内部电流感应和IPROPI的更多信息,请参阅技术文档[1]。
DRV887x系列有刷电机采用 Pin-2 管脚 RDS(on)可扩展型,可覆盖高达 10A 的宽范围峰值电流。DRV8876采用3mm×3 mm四方扁平无管脚封装。
随着扫地机器人的实用性增加,它们的功耗和再充电所需的时间也增加。通过添加集成功能,DRV8876 和 DRV8874 可在节省空间和成本的同时降低总体功耗,从而有助于解决公用事业面临的挑战。
审核编辑:何安
-
模拟
+关注
关注
7文章
1422浏览量
83925
发布评论请先 登录
相关推荐
智能扫地机器人的工作原理和构成
霍尔元件在扫地机器人中的应用
霍尔开关在扫地机器人中的应用
扫地机器人的核心技术突破
扫地机器人避障技术的发展史
供应 英集芯IP2348,适用于扫地机器人解决方案的锂电池同步降压充电芯片
扫地机器人高温高湿试验标准详解及试验方法

光耦知识分享‖探讨光耦技术在扫地机器人的应用

其利天下技术·搭载无刷电机的扫地机器人的前景如何?
鸿蒙南向开发实战:【智能扫地机】
扫地机器人CCC认证申请流程与其他产品的区别是什么?







 工商网监
工商网监
评论