 为什么正确的传感器幅度如此重要
为什么正确的传感器幅度如此重要

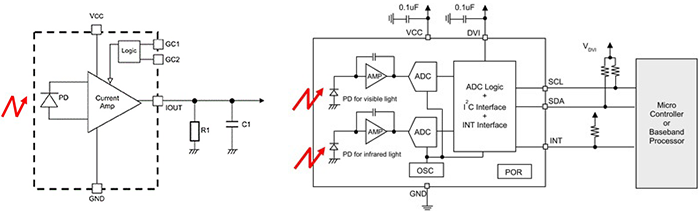
TI的多通道电感至数字转换器 (LDC) 特有一个用来设置最佳传感器幅度的可调传感器驱动电流。这个最佳驱动电流电平取决于传感器,并且由谐振频率上的并联电阻RP决定。一个传感器的RP 越小,所需要的驱动电流就越高。
LDC1612, LDC1614, LDC1312和LDC1314具有被称为IDRIVE的专用驱动电流控制。这个控制功能在每条通道上单独提供,并且设置值在16µA (IDRIVE = 0) 至 1.56mA (IDRIVE = 31) 之间。电流越高,传感器的振幅越大。首选IDRIVE设置为VOSC < 1.8VP 时的最高值。
为什么正确的传感器幅度如此重要?
1.2VP 至1.8VP 之间的传感器振幅 (VOSC) 可以获得最佳的测量精度。以下条件会对性能产生负面影响:
如果VOSC > 1.8VP,由于LDC的内部架构,测量精度会随着温度的上升而下降。
如果VOSC < 1.2VP,那么信噪比 (SNR) 性能会下降。
如果VOSC < ~0.5VP,那么这个传感器也许无法具有一个稳定的振荡,并且LDC无法测量电感值。
相对于保持在1.2VP以上,将电压保持在1.8VP 以下更加重要。当目标距离传感器越来越近时,幅度会减少。为了避免超过上限,在系统最大目标距离的位置上进行测量。如果目标不一定出现在系统中,这可以是大气中的测量值。
为什么不使用自动幅度设置呢?
我只在快速原型设计用途方面建议使用自动幅度特性。通过启用RP 占先(RP_OVERRIDE_EN=1),并且禁用自动幅度校正 (AUTO_AMP_DIS=1),LDC使用IDRIVE寄存器中的驱动电流设置。手工控制可以确保每次系统加电时,每条通道所使用的IDRIVE设置是一样的,不论目标距离如何,都使用的是一样的驱动电流。
有几个确定合适驱动电流电平的方法。使用一个示波器通常是最简单直接的方法,我将在这里对这个方法进行解释。
如何设定IDRIVE
如图1中所示,你可以直接在DRIVE_CURRENT_CHx寄存器内设定IDRIVE,或者在GUI中进行设定。
我如何使用一个示波器来确定最佳驱动电流?
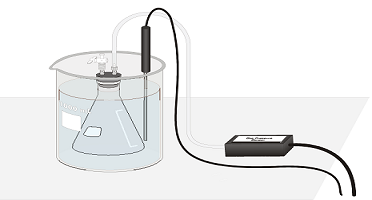
我将一个合适的传感器连接至EVM,并且按照最终系统那样,使目标远离传感器。然后,我将探针设置到INAx引脚,并且测量了相对于接地的振荡电压。
在最开始时,我选了一个非常高的IDRIVE设置,25,并且测量了IN0A引脚上的输出。在图2中,你可以看到峰值振幅为3.3V,这个值高于1.8VP 的建议限值。
然后,我在VOSC < 1.8V之前减少电流设置。在所选传感器和目标距离情况下,这出现在IDRIVE设置 = 19时(请见图3)。需要注意的是,减小目标距离会使得幅度减少,不过没有必要担心,只要符合系统精度技术规格即可。
如果RP 太低,以至于高达31的IDRIVE设置显示出的幅度少于1.2VP,并且如果你只需要通道0的话,那么你可以使用高电流传感器驱动来提升电流 (HIGH_CURRENT_DRV=1)。
如何使用多个传感器
为了执行多个目标的测量、执行差分测量,或者将一个传感器用作基准传感器,很多系统使用多个具有同样传感器特性的传感器。在这个情况下,所有通道有可能使用同样的IDRIVE设置,以确保一致的测量结果。我建议使用上面提到的过程来检查所有传感器。
如果不同的通道使用的传感器组件不一样,那么就单独评估每条通道。没有必要在所有通道上都使用同样的IDRIVE设置。
总结
为了使你的多通道LDC达到最高性能,将IDRIVE电流设定为1.8VP以下的最高值。知道RP 值并不一定是出于这个目的;借助一个示波器,并使用我在这篇博文中描述的过程,你可以确定最佳的设置。
审核编辑:何安
-
模拟
+关注
关注
7文章
1447浏览量
85551
发布评论请先 登录
MEMS传感器为什么如此不可或缺
气体压力传感器型号,如何选型的五种关键因素?
如何为非接触电容式液位传感器正确选型?

【技术】如何正确理解加速度传感器频率响应特性?

如何优化气体压力传感器性能,提高传感器测量精度?
变频器中电压传感器和高精度电流传感器应用推荐

为什么正确安装对铜缆如此重要
什么是传感器标定?传感器标定真的如此重要吗?
什么是照度传感器和接近传感器
浮思特 | 正确使用LEM电流传感器,让测量更精准更省心

如何正确使用莱姆电流传感器(附新手实用指南)





评论