 机器人IMU:补足导航欠缺,辅助机器运动
机器人IMU:补足导航欠缺,辅助机器运动

从扫地机器人到物流机器人到工业搬运机器人,这些都可以算作移动机器人范畴。随着移动机器人的普及,大家也对它们的出现已经习以为常了。我们常见的这些移动机器人都属于轮式机器人,虽然它们有着各种各样的底盘,但归根结底它们的移动都需要靠底盘上的车轮来模拟人的移动。
两轮差速底盘应该是现在应用最多的移动底盘,两个驱动轮带一个从动万向轮,靠差速转弯。扫地机器人以及绝大部分物流AMR都选择了这种移动底盘。尤其是AMR,作为自主导航机器人,机器必须实时知晓自己的位置。在移动机器人测算自己位置的时候,离不开绝对角度这个值,这个值是由IMU提供的。可以说机器人整体里程计的精度,也就是机器人的”位置感”,和IMU有着莫大的关系。
融合IMU成了视觉SLAM方案和激光SLAM方案补足自身导航方案缺点的有效手段。IMU发展至今也将加速度传感器、陀螺仪、磁传感器等MEMS器件集成在一起,以更小的体积、更低的成本来辅助机器运动。本期将挑选机器人应用向性能顶尖的IMU看看它们做到了什么样的层次。
ADIS16486完整惯性系统
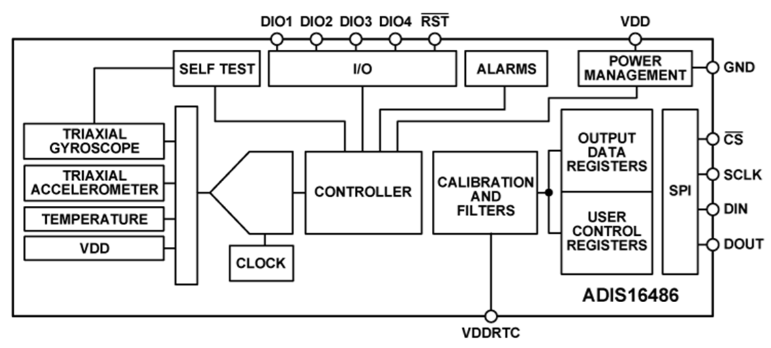
(ADI)
ADIS16486内置了一个三轴陀螺仪和一个三轴加速计,针对各传感器的灵敏度、偏置、对准和线性加速度都进行了校准。可以说每个传感器都配有动态补偿公式,提供精确的传感器测量。
内置的三轴陀螺仪最重要的灵敏度误差,仅有±0.5%,这是最关键的指标。动态范围为±450°/s,轴间错位误差为±0.018°,运行偏置的稳定性为5.3°/h,FS非线性度仅为0.01%。三轴陀螺仪的精度参数值都是很高的精度水平而且噪声密度极低。同时三轴数字加速计的动态范围也在±18g左右。在保证三轴的精度同时,还有着角度增量输出和速度增量输出。严格的正交对准可简化导航系统中的惯性坐标系对准。
该惯性系统可以承受最大2000g的机械冲击,串行外设接口和寄存器结构针对数据收集和配置控制提供简单的接口。这种完整的系统设计比起复杂且昂贵的分立设计,可以说是既简单又高效。这系列可以很好的适配各类移动机器人导航系统。
ICM-42688-P IMU单元
(TDK)
这款6轴MEMS运动传感器,在性能上是绝对的行业领先。它的噪声、灵敏度以及随时间和温度变化的偏置稳定性都处于很高的行业水平。其中的陀螺仪,最关键的灵敏度误差,依然是±0.5%这个绝对领先的数值。在零速率偏移量上,可以做到±0.5dps这种车载水平。而在机器人应用中绝对重要的噪声密度,为0.0028dps/√Hz,低密度的噪声让机器人更容易获取自己的位置信息。
加速度计同样是±0.5%的灵敏度误差以及车载水平的±40mg零加速度偏移量。噪声密度为75dps/√Hz。该IMU配合TDK旗下的RoboVac可以进一步提高应用程序性能的独特功能,如与RTC同步的样本,20位的ADC,32kHz的ODR。
这个系列还有一个更直接的优势,功耗低。在低噪声模式下的A+G为880µA;在低功率模式下的A小于50µA。对于移动机器人这类中小型机器人,低功耗器件往往是厂商的第一选择。
ISM330DHCX iNEMO惯性模块
之所以叫做iNEMO惯性模块,是因为ST在IMU内整合了补充类型的传感器,提供了比分立式MEMS产品更小巧、稳定且易于组装的惯性模块。整合的器件包括加速计,陀螺仪以及磁力计。

(ST)
ISM330DHCX的传感元件采用专门的MEMS工艺制造,IC接口则采用CMOS技术开发,与传感元件有很好的匹配度。在ISM330DHCX中不同于其他设计的是加速度计和陀螺仪的传感元件在同一个硅芯片上,这种设计最直接的效果就是提升了器件的稳定性和鲁棒性。
ISM330DHCX的满标度加速度范围为±2/±4/±8/±16 g,角速率范围为±125/±250/±500/±1000/±2000/±4000 dps覆盖范围很广,不仅适用于机器人应用,对于绝大部分工业应用都有覆盖。虽然该模块是泛工业应用器件,不是专门针对机器人应用推出的,但是它在整体设计有无可争议的优异性能,以及完善的配套可以完美契合移动机器人应用。
首先为了在系统层面进一步节电,iNEMO 惯性模块内嵌机器学习内核。MLC运行一个传感器内置的分类引擎,卸载主处理器的负荷以运行不同的任务,同时内置的传感器可以识别运动数据。另外多个传感器输出的集成令运动传感系统的精度很高,在机器室内导航应用上能很好的弥补V-SLAM和激光SLAM的缺陷。
小结
在机器人应用上这些器件属于高性能的选择,有些指标甚至是车规级应用的水平。移动机器人在IMU上的选择很大程度上决定了其导航水平的高低。没有IMU给SLAM这种极度依赖外部数据的系统提供辅助数据,整个导航系统也是“睁眼瞎”。在移动机器人厂商大谈自家SLAM导航如何优秀如何独特的时候,切不可忘了这些给SLAM技术提供支持的元器件性能是否与之匹配。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
移动机器人
+关注
关注
2文章
820浏览量
34941 -
IMU
+关注
关注
6文章
429浏览量
48121
发布评论请先 登录
相关推荐
热点推荐
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
“盲动”变成“感知运动”
普通机器人靠编码器控制位置,只能“按死命令走”。而关节扭矩传感器实时测量每个关节受到的扭转力,精度可达0.01牛米,采样频率高达1000赫兹(每秒反馈1000次)。这相当于
发表于 04-17 17:27
轻薄型MEMS IMU:机器人运动感知的 “轻量化核心引擎”
设计,成为各类机器人实现精准感知、稳定控制与自主导航的 “神经中枢”,在不增加负载的前提下,为机器人注入了高性能运动感知能力。 极致轻薄,适配全场景
高性能MEMS IMU:机器人自主运动的核心感知中枢
机器人提供了稳定、连续、实时的姿态与运动感知能力,是机器人实现平衡控制、精准导航、安全作业的 “神经中枢”。
导远科技与银河通用机器人达成战略合作
近日,导远科技与具身智能领域的领军企业银河通用机器人达成合作。导远科技将向其交付车规级惯性测量(IMU)模组IMU5146,为银河通用旗下的具身智能机器人提供高精度的速度与姿态信息,助
人形机器人爆发背后,一个被忽视的核心技术:机器人运动学控制
,有一个关键问题常常被忽略:机器人如何精准地“动起来”?这背后的核心技术就是机器人运动学(RobotKinematics)控制。在机器人系统中,运动

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
、低热阻、3D堆叠,支撑实时运动规划与集群控制。
**功率模块和电池管理:SiC、**GaN 器件、大电流、耐高温,适配高压快充与长续航。
二、低温烧结银AS系列:机器人的电子筋骨
1 核心优势:对比
发表于 02-17 14:07
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
ISP多媒体接口,适合构建机器人视觉-运动融合系统,实现工件识别与动态定位。
3. 支持闭环控制与误差校正
可结合高分辨率编码器反馈数据,运行机器人闭环控制算法;
利用AI 协处理器实现机
发表于 11-14 15:48
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
机器人· 应用领域:迎宾机器人、养老机器人、导览机器人· 多摄像头输入:同时实现人脸识别(迎宾)、跌倒检测(养老)、自主导航避障(导览)等多
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
保持平衡及运动控制:人形机器人 IMU 芯片推荐
电子发烧友网综合报道 目前,人形机器人对 IMU(惯性测量单元)芯片的需求主要集中在高实时性、高精度、小尺寸、低功耗等方向,尤其适用于姿态控制、平衡维持、导航定位与动作执行等关键场景。 具体而言
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
支撑机器人竞技能力的核心力量,深刻改变着竞技机器人的能力边界。
磁传感器芯片为机器人运动提供 “精准导航”。在动态平衡系统中,像昆泰芯 K
发表于 08-26 10:02
工业机器人的特点
生产可以提高产品品质。通过设定相同的程序,机器人可实现重复操作,保证了产品的标准化;在精细化生产方面,工业机器人可实现低于0.1毫米的运动精度,可以完成精细的雕刻工作。提高产出
由于机器人
发表于 07-26 11:22
轮式移动机器人电机驱动系统的研究与开发
【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间
发表于 06-11 14:30
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
机场智能指路机器人主要依靠感知系统、定位系统、导航系统、智能交互系统和运动系统协同工作,来实现为旅客准确指路和提供服务的功能,以下是其详细工作原理:
感知系统
传感器类型 :机器人配备
发表于 05-10 18:26



评论