 虹科CANEasy集Vector软件最重要的功能于一身
虹科CANEasy集Vector软件最重要的功能于一身
CANEasy
集Vector软件最重要的功能于一身
1
通道数量和支持的总线系统
| CanEasy | CANalyzer | CANoe | |
| 可配置的CAN通道数量 | 99 | 32 | 32 |
| 可配置的LIN通道数量 | 99 | 64 | 64 |
| 可配置的MOST通道数量 | 16 | 16 | |
| 可配置的FlexRay通道数量[集群] | 32 | 32 | |
| 可配置的以太网通道数量 | 99 | 32 | 32 |
| 可配置的K-Line通道数量 | 32 | 32 | |
| DBC数据库 [A429、AFD√、CAN、CAN FD、CANaero、CANopen、ISO11783、J1708/J1587、J1939] | √ | √ | √ |
| LDF数据库 [LIN] | √ | √ | √ |
| FIBEX数据库[CAN、CAN FD、以太网、FlexRay] | √ | √ | |
| DBC文件编辑器 | √ | √ | √ |
| LIN文件编辑器[文本编辑] | √ | √ | √ |
| LDF Explorer [LIN] | √ | ||
| 显示CAN和FlexRay的AUTOSAR文件 | √ |
2
支持的硬件
| CanEasy | CANalyzer | CANoe | |
| Vector | √ | √ | √ |
| Intrepid | √ | ||
| Peak | √ | ||
| Softing | √ | ||
| Melevix | √ | ||
| Kvaser | √ | ||
| MHS | √ | ||
| IXXAT | √ | ||
| National Instruments | √ |
3
总线分析和监控功能
| CanEasy | CANalyzer | CANoe | |
| 集中配置分析窗口和日志记录 | √ | √ | √ |
| 重复用其他CANalyzer或CANoe配置的测试设置 | √ | √ | √ |
| Trace窗口:用于显示事件时间流的详细信息、差异和统计信息视图 | √ | √ | √ |
| 显示节点或帧级的总线统计信息 [AFDX, CAN, FlexRay, LIN] | √ | √ | √ |
| 在通道水平上显示总线统计 | √ | √ | √ |
| 以直方图显示总线统计数据和统计报告 [A429, CAN, FlexRay, ISO11783, J1939 LIN] | √ | √ | √ |
| 触发器:控制数据记录 [A429, AFDX, CAN, FlexRay, IS011783, J1939, LIN ] | √ | √ | √ |
| 符号映射:连接系统变量/环境变量/信号 | √ | √ | √ |
| 瞬时显示总线信号、环境和系统变量 | √ | √ | √ |
| 信号响应的图形显示 | √ | √ | √ |
| 视频文件的录制和播放 | √ | ||
| 物理总线级显示和逻辑解释[CAN, FlexRay, LIN] | √ | √ | √ |
| 显示系统状态,离散值和CAN帧/突发事件 | √ | √ | |
| LIN分析特征集 | √ | √ | |
| 显示FlexRay集群的统计数据和总线活动 | √ | √ | |
| 测试设置中添加过滤器 | √ | √ | |
| Trace窗口暂时减少显示的数据 | √ | √ | √ |
| 通道过滤器:减少显示的数据 | √ | √ | √ |
| 变量过滤器:减少显示的数据 | √ | √ | √ |
| 信号过滤器:减少显示的数据 | √ | ||
| 离线模式:回放记录的测量数据 | √ | √ | √ |
| 数据导出:在其他程序中使用记录的数据 | √ | √ | √ |
4
用于仿真和建模的功能
| CanEasy | CANalyzer | CANoe | |
| 自动化剩余总线模拟 | √ | √ | |
| 交互式发生器[A429, AFDX, CAN, CANopen, ISO11783, J1708/J1587, J1939, LIN, MOST] | √ | √ | √ |
| 交互式发生器(以太网) | √ | √ | |
| 信号发生器[A429, CAN,以太网、AUTOSAR PDUs,FlexRay, LIN, MOST] | √ | √ | |
| 图形化地创建命令序列的激励和测试 | √ | √ | √ |
| 生成要发送的报文[A429, CAN, LIN] | √ | √ | √ |
| 宏:工具自动化 | √ | √ | √ |
| 启动值窗口:系统变量/环境变量/信号的预定义值,用于测试启动 | √ | √ | √ |
| .NET Snippets工具自动化 | √ | √ | |
| LIN交互式主站 [LIN] | √ | √ | √ |
| LIN节点仿真[Master/Slave] | √ | √ | √ |
| LIN网络管理窗口(LIN) | √ | ||
| 与正在运行的模拟并行回放一个记录的测试 | √ | √ | √ |
| 具有全局有效性的变量,可以应用于所有的分析窗口和日志记录 | √ | √ | |
| 网络的符号化显示 | √ | √ | |
| 模拟设置:报文和通道的过滤器,取决于总线系统 | √ | √ | |
| 定义/访问环境变量 | √ | √ | |
| 模型设计/生成/执行的网络描述[CAN, FlexRay,ISO11783,J1939,LIN,MOST] | √ | √ | |
| 执行仿真模型 | √ | √ | |
| 建模库[例如,传输协议,交互层,网络管理],OEM-specific extensions | √ | √ | |
| 用于节点仿真的建模库[IS011783-150-Bus, CANopen, Car2X] | √ | √ | |
| 以太网:会话和监听流的仿真,包括AVTP, gPTP,时钟主从点 | √ | √ | |
| CAPL编程/执行/调试 | √ | √ |
5
集成或外部编程能力
| CanEasy | CANalyzer | CANoe | |
| 应用程序的Visual Basic | √ | ||
| 用于总线访问的CAPL函数[A429, AFDX, CAN,LIN, FlexRay, ISO11783, J1708/J1587, J1939, MOST] | √ | ||
| Visual Sequencer | √ | √ | √ |
| C-API,用于开发特定应用程序的代码 | √ | √ | √ |
| .NET编程(C#),用于实现模拟网络节点、测试模块或代码片段 | √ | √ | |
| 以太网TCP/IP栈支持[以太网] | √ | √ | √ |
| 中央数据库与事件数据库 | √ | ||
| 在仿真时改变通信矩阵 | √ | ||
| 通过API创建面板 | √ | ||
| 作为windows服务运行 | √ |
6
用于扩展图形用户的面板
| CanEasy | CANalyzer | CANoe | |
| 创建/执行显示面板元素 | √ | √ | √ |
| 创建/执行控制面板元素 | √ | √ | √ |
| Activex面板元素[OCX,.NET] | √ | √ | √ |
| 自动生成面板 | √ | ||
| 图形加速面板 | √ | ||
| 通过自己的控件扩展面板的能力 | √ |
7
诊断功能集
| CanEasy | CANalyzer | CANoe | |
| TP Observer[CAN, FlexRay, J1939, IS011783] | √ | √ | √ |
| TP Observer[以太网] | √ | √ | √ |
| AVTP Observer[以太网]:AAF 和 CVF 协议 | √ | √ | |
| 诊断Observer:符号化解释诊断报文 | √ | √ | √ |
| 诊断测试仪:由诊断控制台和故障记忆窗口组成 | √ | √ | √ |
| 诊断参数窗口 | √ | √ | √ |
| 支持UDS / KWP2000 | √ | √ | √ |
| 集成OBDⅡ测试仪 | √ | √ | |
| 支持DolP [IP诊断]和SFZ[High-Speed-Fahrzeug-Zugang] | √ | √ | |
| CAPL诊断 | √ | √ | √ |
| 基本诊断:支持没有描述文件的诊断 | √ | √ | √ |
| 显示诊断描述文件[0DX/CDD] | √ | √ | √ |
| .NET诊断脚本 | √ | √ | |
| 诊断模拟 | √ | √ |
8
集成其他接口或其他选项
| CanEasy | CANalyzer | CANoe | |
| 用C语言实现相关功能 | √ | √ | √ |
| 在网络接口(CAN)上执行CAPL | √ | ||
| 从第三方供应商连接模拟/数字测试硬件 | √ | √ | |
| COM服务器:用于远程控制的自动化接口 | √ | √ | √ |
| 在仿真中集成Simulink模型 | √ | √ | |
| 与LabVIEW进行数据交换 | √ | √ | √ |
| AMD/XCP对ECU中的内存位置进行读写和ECU分析 | √ | √ | |
| GPS:可视化并记录车辆的位置 | √ | √ | |
| 信号协议DLL[以太网]:在专有协议中解释信号 | √ | √ | √ |
| 使用CAPL访问TCP/IP socket | √ | √ | √ |
| 使用CAPL访问RS232 | √ | √ | √ |
9
CANoe选项.AMD / XCP
| CanEasy | CANalyzer | CANoe | |
| XCP/CCP配置窗口 | √ | √ | |
| 通过CAN以太网[TCP和UDP]FlexRayLIN和CCP上的XCP在线访问RAN中的内部ECU值 | √ | √ | |
| 测量方法:DAQ,Polling,on connect,Single Shot Upload over CAPL | √ | ||
| 通过下载将标量、多维和复杂变量写入ECU的RAM | √ | √ | |
| 用ECU时间戳测量DAQ | √ | ||
| 支持ASAM MCD-2 MC [A2L]数据库 | √ | √ | |
| 支持标量CCP/XCP数据类型[UBYTE, SBYTE…] | √ | √ | |
| 复杂CCP/XCP数据类型:一维数组、CURVE、MAP | √ | ||
| 通过Seed和Key安全访问 | √ | √ | |
| 并行访问多个ECU | √ | √ | |
| 在链接器映射文件时更新ECU符号地址 | √ | √ | |
| 在运行时更新ECU符号地址 | √ |
10
处理
| CanEasy | CANalyzer | CANoe | |
| Drag 和Drop | √ | √ | √ |
| Clear Arrangement | √ | √ | √ |
| 可扩展性(插件) | √ |
11
软件授权方式
| CanEasy | CANalyzer | CANoe | |
| Workstation | √ | √ | √ |
| 用户许可证 | √ | ||
| USB加密狗 | √ | √ | √ |
| USB加密狗的应用 | √ | ||
| 在硬件上的许可证 | √ | √ | |
| Floating License | √ | ||
| 租赁 | √ |
12
CANdela
| CanEasy | CANdela | |
| 功能 | ||
| 导入和导出不同的交换格式[ODX, AUTOSAR DEXT, CSV, RTF, HTML, A2L, XML, CDI] | √ | √ |
| 支持文档模板 | √ | √ |
| 输入过程中的一致性检查 | √ | |
| Diagnostics-oriented用户界面 | √ | |
| 支持不同网络的不同协议[UDS,KWP2000, OBD, WWH-OBD, CAN, CAN FD, LIN, MOST, FlexRay, D0IP] | √ | √ |
| 两个版本之间的比较视图 | √ | √ |
| 导入和导出诊断故障代码(dtc) | √ | |
| 错误内存处理中dtc描述的文档和显示 | √ | √ |
| 诊断故障代码的不同视图 | √ | √ |
| 结构化操作概念 | √ | √ |
| 单源数据库 | √ | √ |
| 支持Object-ID [OID] | √ | |
| 简单编辑Text-ID [TID] | √ | √ |
| 请求和响应数据的图形概览,用于位和字节位置的可视化 | √ | √ |
| 诊断服务的状态依赖性的图形化可视化和表格化处理 | √ | |
| 数据交换 | ||
| 从ODX描述中导入层和服务(使用ODXStudio View显示数据) | √ | √ |
| 支持ODX导出时各厂商的通信参数和表格 | √ | |
| 诊断规范导出(RTF, HTML) | √ | √ |
| 服务概述导出[CSV] | √ | √ |
| 从AUTOSAR系统导入描述的信号和转换 | √ | √ |
| 用于生成AUTOSAR诊断提取的导出函数(DEXT文件) | √ | |
| 以A2L格式导入数据 | √ | √ |
13
CANape
| CanEasy | CANape | |
| 时间同步PTP / IEEE802.1AS | √ | |
| 通过CCP, XCP进行在线校准 | √ | √ |
| 在线校准十六进制和其他二进制文件 | √ | √ |
| 通过KWP2000, UDS, DoIP诊断 | √ | √ |
| 支持CDD和ODX文件 | √ | √ |
| 访问车辆的OBD数据 | √ | |
| 离线数据分析 | √ | √ |
| “Software in the Loop”的运行环境 | √ | √ |
| 刷新二进制文件和参数集 | √ | |
| 管理校准数据(通过vCDM) | √ | |
| 自动化接口(通过C-API, COM, ASAP3, ASAM MCD-3 MC, iLinkRT) | √ | √ |
| I/0接口集成任何测量系统 | √ | |
| 自动化过程(函数式语言CASL) | √ | |
| 函数库,例如用于计算多个信号或滤波噪声信号 | √ | √ |
| 可视化Simulink和状态流模型 | √ | √ |
| 创建和集成特定于用户的显示和操作元素 | √ | √ |
| 在电子地图上可视化当前的GPS车辆位置 | √ | |
| 打印和报告功能 | √ | |
| 记录CAN总线数据 | √ | √ |
| 显示DAQ列表使用情况 | √ | |
| 优化的DAQ列表以实现最大的数据传输 | √ | |
| Trace窗口中的总线通信分析 | √ | √ |
| 用于目标数据记录的触发选项 | √ | √ |
| 解密加密的CAN报文 | √ | |
| 独立的数据记录仪 | √ | √ |
| CCP和XCP测量,包括Seed和Key的处理 | √ | |
| 可扩展分散记录仪解决方案 | √ | |
| 通过以太网进行XCP | √ | |
| 支持总线CAN (FD), Ethernet, BraodR, SOME/IP, FlexRay LIN, SAE J1939, CANopen, GMLAN, K-Line | √ | √ |
| 使用的文件格式为MDF、HDF5、Excel | √ | |
| 信号随时间显示或在XY显示 | √ | √ |
| 测量数据的自动评估 | √ | √ |
| 插入注释以进行离线分析 | √ | |
| 从测量文件导出序列与同步视频编辑 | √ | √ |
| DAIO接口(数字/模拟I0)用于测量解决方案 例如Quantumx, AD win, faceLAB, Dikablis | √ | |
| 与测量数据采集并行的特性变量调整 | √ | √ |
| ECU参数离线模式 | √ | √ |
| 数值和图形调整窗口,调整特征曲线和场 | √ | |
| 通过DAQ / STIM实现基于PC的旁路[通过VN8900) | √ | |
| ASAP2的编辑器,DBC | √ | √ |
| 查看Fibex, LDF, ODX, CDD, ARXML | √ | √ |
| 通过OpenStreetMap, Shobunsha Super MappleG等地图获取GPS数据及图形文件 | √ | |
| 通过CCP / XCP和UDS进行刷写 | √ |
责任编辑:haq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
软件
+关注
关注
69文章
4939浏览量
87458 -
虹科电子
+关注
关注
0文章
602浏览量
14350
原文标题:虹科新品CanEasy和Vector软件功能对比
文章出处:【微信号:Hongketeam,微信公众号:广州虹科电子科技有限公司】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
集性能与成本于一身的IMU,让无人机飞行更稳定
无人机在进行任何形式的飞行时,必须了解空中平台的方向、其运动的性质以及飞行方向。通常用于测量此运动的是IMU,IMU提供与无人机三个轴向的加速度和角速度数据,以及有关无人机在横滚、俯仰和偏航方面的测量数据。常见应用包括控制和稳定、制导和校正、测量和测试。

手持多参数速测记录仪:集多种测量功能于一体
速测记录仪的显著特点便是能够集多种测量功能于一身,广泛涵盖了众多关键参数的检测。在水质分析领域,它可以精确测量酸碱度(pH),实时反映水体的酸碱性程度,这对于判断水质是否适宜水生生物生存以及评估水体受污染状况至
Vector推出一套基于Visual Studio Code的免费插件
编写工具(如Vector的CAPL Browser)虽然功能强大,但是结合Visual Studio Code更能够满足多语言编程和集成现代开发工具的需求。 因此,Vector推出一套

NVIDIA助力蔚来乐道L60智能电动SUV上市
蔚来旗下智能电动车品牌的旗舰级 SUV,集安全、舒适与先进的辅助驾驶功能于一身,为家庭出行带来极致体验。
虹科方案 | 精准零部件测试!多路汽车开关按键功能检测系统
在汽车制造业中,零部件的安全性、功能性和可靠性是确保车辆整体性能的关键。虹科针对车辆零部件的LIN/CAN总线仿真测试,提出了基于虹科Bab

凌科BD系列金属工业连接器在医疗CT设备上的应用
CT设备是一种先进的医学影像学诊断手段,它能通过断层扫描图像帮助医生诊断患者病变和疾病。对于集高端技术于一身的精密设备,CT设备对所需工业连接器运行的高效和可靠要求非常严苛,这是医疗设备普遍的高准入门槛决定的。
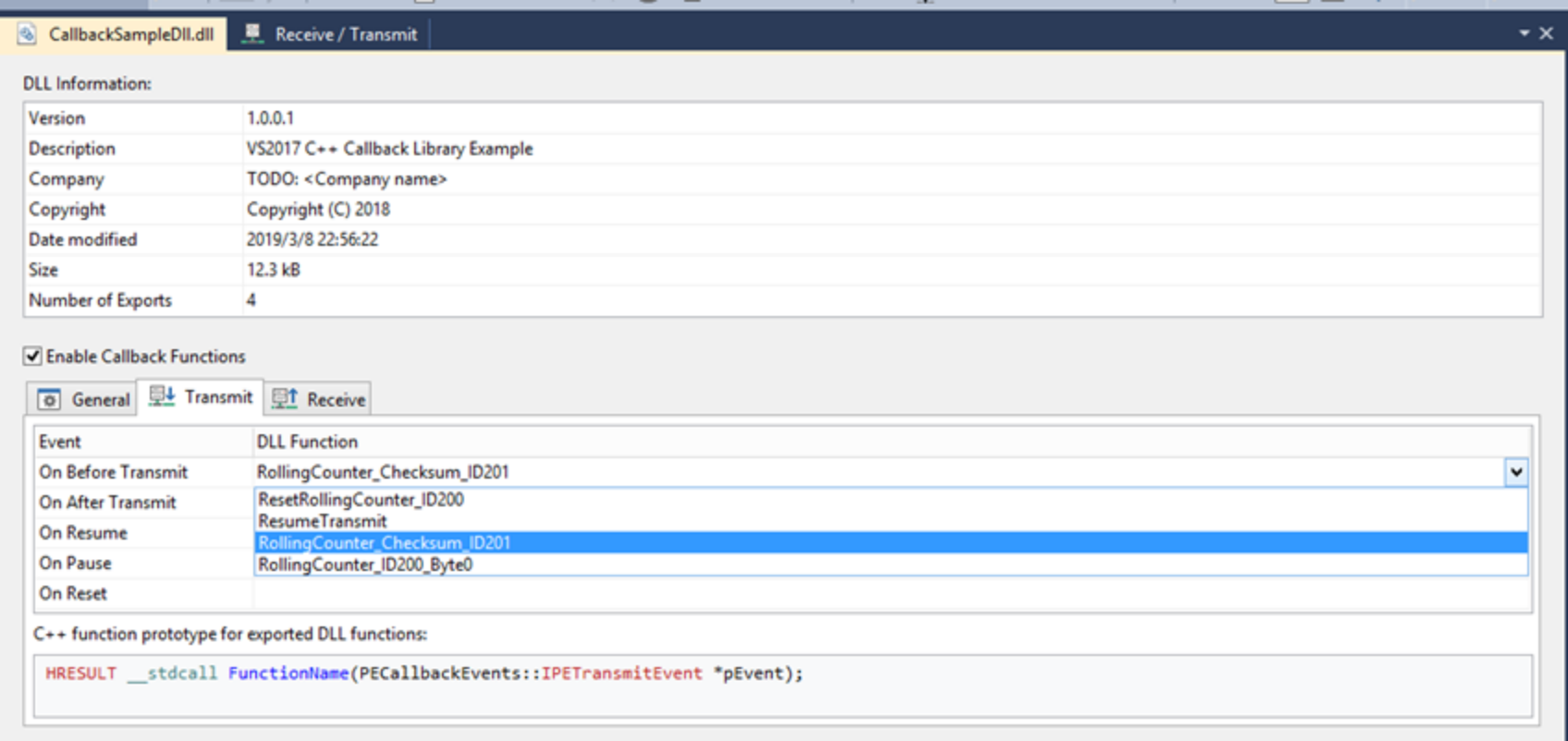
虹科干货 轻松掌握PCAN-Explorer 6,dll调用一文打尽!
导读:虹科PCAN-Explorer 6(下称“PE6”)作为一款专业的CAN/CAN FD网络处理软件,不仅提供了强大的报文监控和发送功能
虹科应用 当CANoe不是唯一选择:发现虹科PCAN-Explorer 6
在CAN总线分析软件领域,当CANoe不再是唯一选择时,虹科PCAN-Explorer 6软件成为了一
RFID手持机是怎么工作的?
RFID手持机是带有RFID识读功能的手持设备,除了能对电子标签进行识读,还集其他数据采集方式及功能于一身,满足不同场景的应用需求。
SK海力士HBM技术再创新高,将集成更多功能
SK海力士正全力开发HBM4E存储设备,意欲打造集计算、缓存和网络存储于一身的新型HBM产品,进而提升性能与数据传输速率。
混合信号 SOC 产品用户指南
芯海混合信号 SOC 产品是指集成了 RISC MCU、高精度 ADC、LED/LCD 显示模块等高系统集成的产品。芯片系统资源为特定应用领域量身定做,集高性能,高集成度,高性价比于一身。用户可根据对应芯片型号的规格进行修改,仅供参考。*附件:APN_SOC_用户指南V0
发表于 05-16 09:51
虹科干货丨轻松掌握PCAN-Explorer 6,dll调用一文打尽!
虹科PCAN-Explorer 6(下称“PE6”)作为一款专业的CAN/CAN FD网络处理软件,不仅提供了强大的报文监控和发送功能,还通
虹科新品 | E-Val Pro Plus有线验证解决方案
有线验证解决方案虹科E-ValProPlus虹科我们很高兴地宣布,我们将推出全新的虹科E-Val

炬芯科技携手圆周率智能推出一款全球离线地图导航方案
近日,炬芯科技与深圳市圆周率智能信息科技有限公司(以下简称“圆周率智能”)达成深度合作,双方协力共同推动嵌入式地图引擎在终端智能设备上应用,这项软件技术集地图显示、导航、地理信息等功能于一身





 工商网监
工商网监
评论