 连续模式下SPI从机设置
连续模式下SPI从机设置
FlexIO是广泛应用于恩智浦微控制器上的外设,凭借高度的灵活性和可配置性,可以用来模拟常见的UART、I2C、I2S、SPI等接口。当片上的外设资源不够用时,使用FlexIO进行模拟也是很实用的方法。
本文的介绍来自于真实客户需求,即一个榨干了i.MX RT1010所有外设资源后不得不用FlexIO模拟SPI从机协议,不得不让SPI从机工作在连续模式,以及从机不知道主机会传给从机多少个数据的案例。
问题的提出
首先介绍我们要实现的目标,在i.MX RT1010上使用FlexIO模拟SPI Slave 设备,在连续模式下接收动态大小数据帧。硬件平台就是我们的RT1010 EVK开发板了,软件环境是SDK 2.9.1,工程开发基于edma_lpspi_transfer 中slave项目进行开发,具体路径如下:
boardsevkmimxrt1010driver_examplesflexiospiedma_lpspi_transferslave
本次模拟的SPI从机是工作在CPOL=0 & CPHA=0的工作状态。
在阅读下面的内容前,建议学习AN12780作为基础,AN12780介绍了如何使用FlexIO模拟非连续模式下的SPI方法。
本次连续模式的开发也是基于非连续模式的方法进行改动后实现的。
连续模式下SPI从机设置
连续模式与非连续模式的区别在于,SPI在传输完一个byte(也可以是多个byte,此处为方便描述,使用1个byte)数据后,是否需要拉高片选信号(CS);连续模式下,传输完一个byte后不拉高片选信号。因此需要在非连续模式的基础上进行一些改动。
首先Timer0需要在CS pin拉高时关闭,即CS pin的上升沿时关闭。其次,Timer0在传输数据帧传输过程中需要一直开启。此时的数据帧不是特指1个byte的数据,而是广泛的指一个或多个byte组成的数据帧。
然而,因为Timer0无法在一帧数据的最后关闭——CS信号拉高总是晚于最后一个数据的收发——这意味着,总会在最后一个字符的最后一位传输后发生一次额外的加载。请注意下图中用绿色标记的地方。
额外加载的原因在于当shifter工作在发送模式时,Timer计满之后将会从SHIFBUF加载新的数据到TX shifter。这意味在下一轮数据传输时,一个无效的数字将会被传输。
实际上,这个额外的加载在数据帧的每一个字符传输过程中都会发生,但是因为工作在连续模式,因此不会出现异常。
对于RX shifter, 它将会在CS拉高的时候触发一次额外的存储事件。因为当CS拉高的时候,Timer会被关闭,此时RX shifter将会把shifter内的数据存储到SHIFBUF中,随后马上发起了新的一次DMA搬运。这意味着一个无效的数据被存储并且该数据通常是0。
为了避免这些问题,清空shifter内的数据即可解决问题。因为FlexIO模块没有相关的bit可以清空shifter寄存器的功能,所以可以使用下面的方法实现清空shifter的功能。
TXshifter:关闭shifter后再次配置为TX 模式,对应的shifter内数据即可清空。
RXshifter:读一下shifter对应的buffer寄存器,shifter内的数据即可清空。
在例程代码中,shifter0是TX移位器,shifter1是RX移位器。因此在完成一帧数据的传输后,调用下面的接口函数即可实现共两个shifter数据的清空。
void FLEXIO_SPI_FlushShifters(FLEXIO_SPI_Type *base)
{
volatile uint32_t tmp;
base-》flexioBase-》SHIFTCTL[base-》shifterIndex[0]] &= ~FLEXIO_SHIFTCTL_SMOD_MASK;
base-》flexioBase-》SHIFTCTL[base-》shifterIndex[0]] |= FLEXIO_SHIFTCTL_SMOD(kFLEXIO_ShifterModeTransmit);
tmp = base-》flexioBase-》SHIFTBUF[base-》shifterIndex[1]];
__DSB();
}
下面的表格介绍了Timer0的具体设置,用红色高亮标记的地方是区别于非连续模式的设置,完成更改之后即可实现从机在连续模式下工作。
1. 因为pin Polarity 设置为active low, 所以时序极性发生改变,因此使能信号为上升沿(真实的输入使能信号为下降沿)。
RX shifter的设置为:
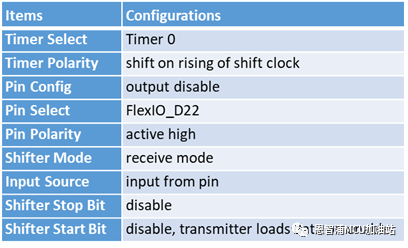
此时,我们便可以让从机设备工作在连续工作模式了,另外各位小伙伴还要记得,这种连续工作模式,是有一点点不太完美的瑕疵的,就是额外的加载事件,因此要记得在每次数据接收完毕之后,要用上文提到的shifter清洁函数刷新shifter的内容哦。
连续模式下SPI从机
接收动态帧大小的设置
SDK默认例程中,DMA被用来搬运数据以提升效率。但是DMA中断通常是在接收到一定数量的数据后产生。
但在实际的应用中,每帧传输的数据大小可能不是固定的,从机也不知道在一帧数据中有多少数据。在这种未知一帧数据大小的情况下,使用DMA接收到固定数量的数据后产生中断的方法不能满足实际需求。
在LPSPI传输过程中,CS引脚的下降沿表示传输开始,CS引脚的上升沿表示传输结束。因此,从机可以通过检测CS引脚的上升沿和下降沿来知道一帧数据已经完成传输。
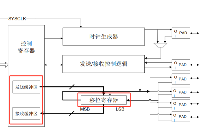
为了实现这个功能,可以增加一个定时器(Timer)来检测CS引脚的状态。
基本方法是让定时器在16位计数器模式下工作,计数值为0。这意味着一旦定时器超时,它会产生一个比较事件,并会产生一个FLEXIO中断。从机再处理此中断并且解析接收数据的数量。
现在,有两个问题。第一个是定时器何时启用(timer enables source)以及定时器递减源(timer decrement source)是什么,第二个是从机如何知道它使用DMA 接收了多少数据。
对于第一个问题,定时器可以通过引脚的下降沿或触发信号的下降沿使能。关于定时器递减源,引脚输入递减或触发输入递减均可使用。定时器可以通过CS引脚的下降沿使能,然后当CS引脚上升时,比较事件(compare envet)发生,同时产生FlexIO中断。除此之外,定时器还需要在定时器比较事件时关闭。
下表描述了使用pin下降沿作为定时器使能递减源的具体配置。
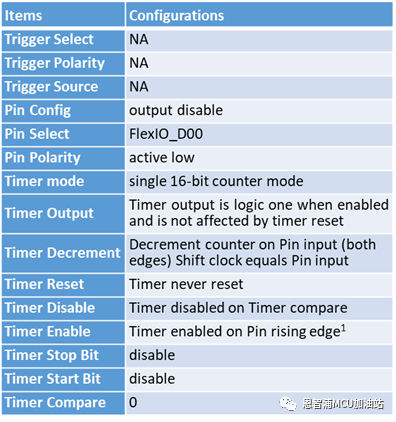
1. 因为pin Polarity 设置为active low, 所以时序极性发生改变,因此使能信号为上升沿(真实的输入使能信号为下降沿)。
下表描述了使用trigger下降沿作为定时器使能递减源的具体配置:
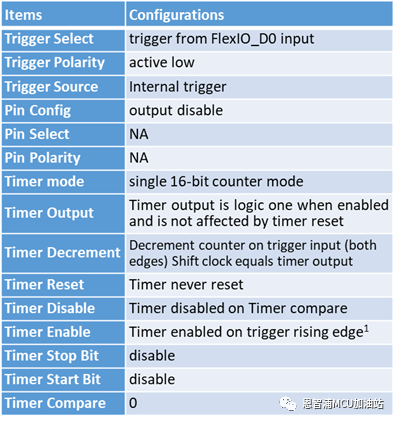
1. 因为trigger Polarity 设置为active low, 所以时序极性发生改变,因此使能信号为上升沿(真实的输入使能信号为下降沿)。
第二个问题是从机如何知道它使用DMA接收了多少数据。下面的这个接口函数API可以用来实现这个功能:
static inline status_t FLEXIO_SPI_SlaveTransferGetCountEDMA(FLEXIO_SPI_Type *base,
flexio_spi_slave_edma_handle_t *handle,
size_t *count)
对于这个API函数,有两点需要注意。
第一点是这个API的注释描述不是很准确(将会在SDK 2.11.0版本进行更新)。这个API的功能是:获取当前通过FlexIO SPI DMA的方法,接收到的数据数量。
第二点是这个API返回的结果(count,API中第三个参数)不能直接使用,正如上文所述,因为在CS拉高的时候会触发额外的一次DMA搬运。
因此,接收到的数据大小应该是:
size = count - 1; //The count is the thirdparameter on API
在获取数据帧大小后,需要使用下面的API终止FlexIO SPI DMA的传输。但是现在,这个API实现的功能是暂停传输而不是终止传输。这意味着这个API需要进行一些改动才能满足要求。这个问题将会在SDK 2.11.0进行更新。
void FLEXIO_SPI_SlaveTransferAbortEDMA(FLEXIO_SPI_Type *base,flexio_spi_slave_edma_handle_t *handle)
在fsl_flexio_spi_edma.c 的第409 和 410行使用下面的代码替代即可。
EDMA_AbortTransfer(handle-》txHandle);EDMA_AbortTransfer(handle-》rxHandle);
解决这两个问题后,从机就可以接收数据大小变化的数据帧了。但是在这种情况下仍然有一个限制,即帧的大小应小于或等于 DMA 可接收的数量。
例程代码运行
在运行代码之前,EVK板需要进行一定的改动:
去掉电阻R90,使用0Ω电阻焊接到R800。
按照下面的设置将SPI的主机和从机连接起来。
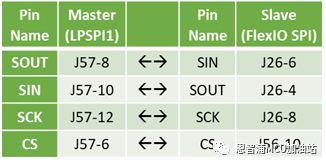
具体实现代码可以在应用笔记的附件中找到,打开edma_lpspi_transfer slave 工程,使用附件中的文件替换。具体路径为:
boardsevkmimxrt1010driver_examplesflexiospiedma_lpspi_transferslave
在默认设置下,主机将向从机发送16个字节,从机将产生一个FlexIO中断。从站可以接收的最大数量为64字节。
用户可以更改以下参数来配置主机发送数据帧的大小。
masterXfer.dataSize = TRANSFER_SIZE;
在一帧数据完成发送/接收后,将会进行一次简单的校验。如果校验通过,在串口终端输入任意一个字符即可开启新的一轮数据传输。
责任编辑:haq
-
控制器
+关注
关注
112文章
16361浏览量
178014 -
恩智浦
+关注
关注
14文章
5860浏览量
107450 -
SPI
+关注
关注
17文章
1706浏览量
91571
原文标题:FlexIO模拟连续模式下的SPI从机设备
文章出处:【微信号:NXP_SMART_HARDWARE,微信公众号:恩智浦MCU加油站】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
ADS1259 SPI连续读模式下突然中断,突然不出现下降沿了,是什么原因?
TDC7201的SPI从模式下DOUT无输出响应怎么解决?
ESP32从机设置bits_per_sample为32的情况下,从机无法向主机发送数据的的原因?
请问ESP32S3从机模式下如何连续接受多帧数据?
探索SPI单线传输模式中时钟线与数据传输的简化
使用myir的开发板进行spi通信,emmc模式下使用spi1则无法接收到数据,为什么?
超详细的SPI原理和通信模式
临界模式与连续模式的区别





 工商网监
工商网监
评论