 比激光雷达还贵!红外热成像会成为自动驾驶的新宠?
比激光雷达还贵!红外热成像会成为自动驾驶的新宠?
电子发烧友网报道(文/梁浩斌)在自动驾驶的传感器选择上,目前在量产车型上主要有几种选择,一是视觉+毫米波雷达(当然现在特斯拉要走的是纯视觉路线),这也是目前大部分L2级辅助驾驶车型上所采用的传感器方案;二是激光雷达为主,加上视觉传感器以及毫米波雷达,以多传感器融合的方式实现更高阶的自动驾驶。
要实现高阶自动驾驶,需要获取更多的路面数据,而为了获取路面信息,目前主流的激光雷达、图像传感器、毫米波雷达是否就能够满足需求呢?
举例来说,2018年Uber采用激光雷达+毫米波雷达+视觉传感方案的自动驾驶汽车,在夜间进行测试工作时安全员分神,而车辆撞到一名行人并导致其死亡。在这起事故中,自动驾驶车辆在发生撞击前5.6秒其实就已经检测到了行人,但将其错误识别成汽车,而在5.6秒时又将识别到的行人归类为其他物体,导致系统无法判断该物体的性质而未有进行刹车动作。
而特斯拉的视觉+毫米波雷达同样出现过多次事故,比如车辆在高速公路上行驶时,无法识别因事故而横倒在路上的白色货车而发生碰撞事故。
这里表现了当前自动驾驶传感器组合中的一些欠缺,无论是以激光雷达为主的路线,还是纯视觉的路线。可以发现,目前红外传感器在自动驾驶的主流方案上比较罕见。
当然,为了更高的安全性,自动驾驶需要更大的冗余空间,比如用不同的传感器来针对不同的场景进行识别。自动驾驶有两大核心,感知和算法,要算法体现出实际效果,第一步是要“看得见”。
红外热成像相比于其他传感器,首先在识别生物上具有无可比拟的优势。前面提到的Uber夜间行驶事故,虽然有一部分是由于多传感器导致的系统错误,无法判断物体,但如果加上红外热成像技术,增加从温度去判断物体的性质,就可以从根源上解决物体判断的难题,特别是在行人识别方面。
其次,不只是在夜间,红外热成像是可以全天候工作的,不受白天夜间影响,并且可以弥补视觉传感中难以防止眩光的劣势。
另外,红外在雾霾等恶劣天气环境中有良好的穿透效果,这也是激光雷达以及视觉传感的劣势场景之一。
既然效果这么好?那么为什么很少听到有自动驾驶车型用上红外热成像技术?
事实上,我们在新款的保时捷帕拉梅拉车型上发现,红外热成像已经成为一项选配,保时捷称之为“夜视辅助系统”。只是其主要功能不是用于自动驾驶,而是用于在检测应急范围内的行人或者野生动物,并向驾驶员及时发出警告。
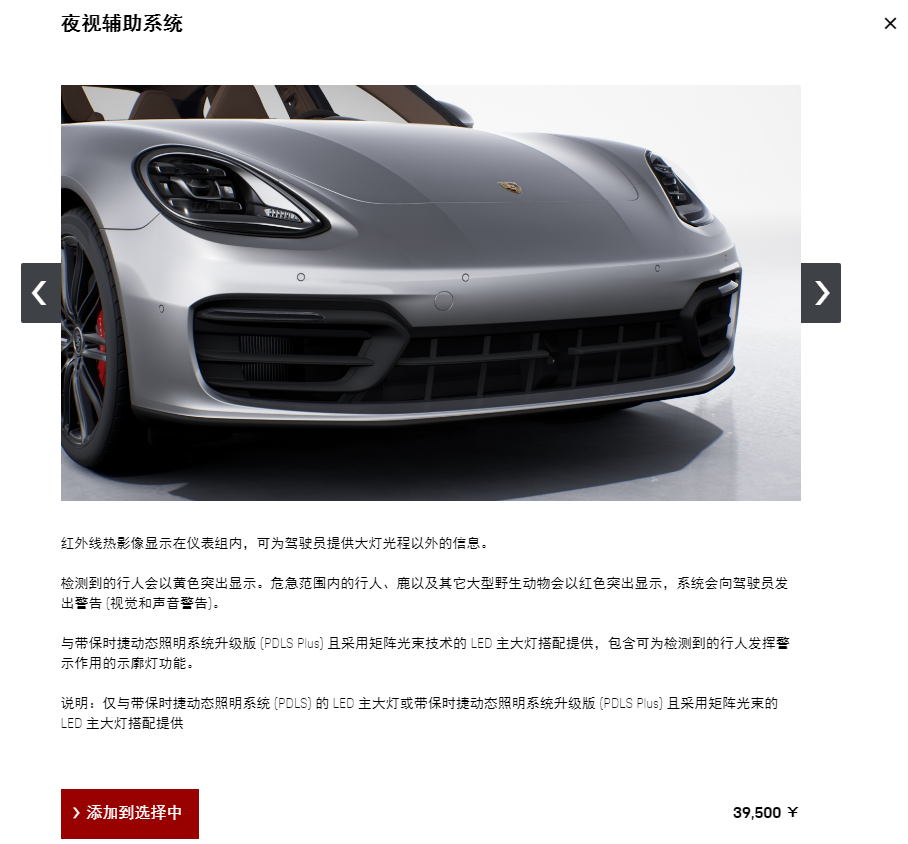
其实,上述问题的答案很简单,那就是贵!保时捷选配价格高达39500就能说明这一点。与几年前的激光雷达一样,由于规模效应还没有体现,目前红外热成像传感器价格居高不下。
笔者在与国内某红外成像技术大厂交流时了解到,目前其车载红外产品最高可以实现1920×1080分辨率,但仅640×512分辨率的中远距离车载红外热成像产品单价也要万元以上。
随着自动驾驶技术的发展,红外热成像是否会被更多的主机厂加入到自动驾驶传感器“全家桶”中?我们将持续关注。
-
激光雷达
+关注
关注
969文章
4046浏览量
190661 -
红外热成像
+关注
关注
2文章
361浏览量
15197
发布评论请先 登录
相关推荐
激光雷达是自动驾驶走的一段弯路吗?
禾赛激光雷达助力宝马智能工厂自动驾驶
激光雷达光电组件的AEC-Q102认证:保障自动驾驶硬件的可靠性与品质

Mobileye牵手Innoviz合作激光雷达用于其Mobile Drive平台
激光雷达在自动驾驶中的应用
激光雷达与纯视觉方案,哪个才是自动驾驶最优选?
L4自动驾驶需求迭代,360°激光雷达也要进入芯片化时代

聊聊自动驾驶离不开的感知硬件
激光雷达滤光片:自动驾驶的“眼睛之选”

FPGA在自动驾驶领域有哪些应用?
百度萝卜快跑第六代无人车携手禾赛AT128激光雷达,共筑自动驾驶新篇章
阜时科技近期签订商用车自动驾驶全固态激光雷达批量订单
激光雷达的应用场景
硅基片上激光雷达的测距原理






 工商网监
工商网监
评论