 基于Jetson Nano的六轴协作机械臂myCobot
基于Jetson Nano的六轴协作机械臂myCobot
大象机器人致力于为机器人教育及科研机构、商业场景、工业生产提供高柔性的协作机器人、简单易学的操作系统以及智能的自动化解决方案。
myCobot 机械臂由大象机器人出品,是一款基于 Jetson Nano 的六轴协作机械臂,体积小巧但功能强大,既可搭配多种末端执行器适配多种应用场景,也可根据用户的需求进行二次开发,实现用户个性化定制,是生产力工具也是想象力边界的拓展工具。
NVIDIA人工智能套装视觉识别技术
助力开源创意实践
大象机器人与 NVIDIA 合作,打造突破性产品,创造出体积小巧的 Jetson Nano 六轴协作机械臂,以亲民的价格提供高品质的产品。
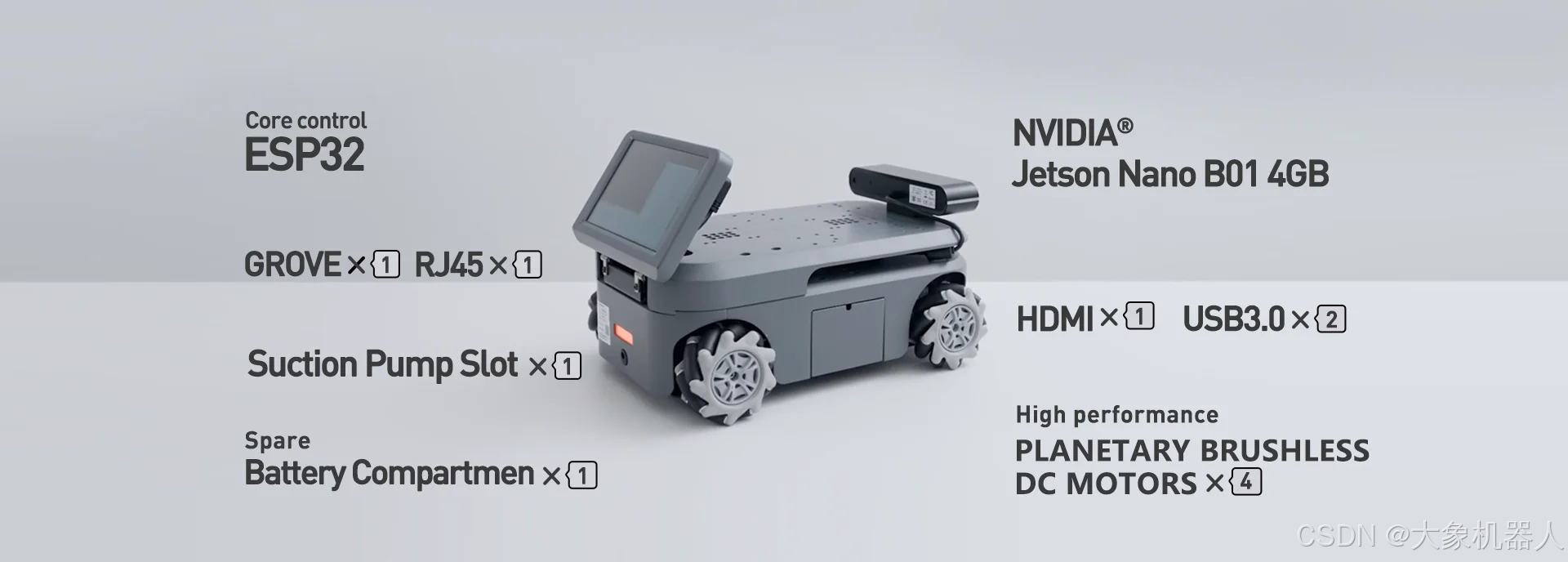
myCobot 机械臂嵌入的 Jetson Nano 是一款小巧的 AI 计算机,具备高性能和低功耗,可以运行现代 AI 工作负载,并行运行多个神经网络,以及同时处理来自多个高分辨率传感器的数据。
Jetson Nano 是开始学习 AI 和机器人技术的理想工具,完善的软件驱动库包含用于深度学习、计算机视觉、图形、多媒体等方面,可助您快速上手。
人工智能套装集图片识别、颜色识别、定位抓取、自动分拣模块于一体,基于 Linux 系统,在 ROS 中搭建 1:1 仿真模型,通过 Jetson Nano NVIDIA 开发模组带入更多交互应用的可能性,可使用软件控制机械臂从而实现更多手眼结合的操作包括代码识别及追踪。
它简单易用,有良好的扩展性和高度的开放性,一机多用,适用于高校平台、机器人学科建设、机器人实验室或个人工程师学习使用。快速掌握人工智能原理及实际应用,实践更多的开源创意文化 。
大象机器人:打造带机器视觉识别的
自动化解决方案
成立于 2016 年中国·深圳,深圳市大象机器人科技有限公司是一家专注于机器人研发生产、平台软件开发及智能制造服务的全球性新高科技企业。核心团队由英、美、澳海归与俄罗斯外籍工程师团队组成,与墨尔本大学,俄罗斯国立核能研究大学,华南理工大学等高校,建立联合实验室并突破关键技术,打造了从教育到专业级别的一系列协作机器人解决方案。
公司自创立之初便奠定了国际化创新基础,秉持“Enjoy Robots World”的愿景,大象机器人从生活乐趣和工作效率出发,已自主研发机器人产品包括仿生机器人( MarsCat 火星猫),消费级协作机器人( myCobot / myPalletizer / myAGV ),专业级协作机器人( P / C / myCobot Pro 及关节模组 )。产品广泛应用于智能制造生产、商业场景、科研教育、家居生活等多个领域,其产品质量及智慧方案备受全球市场关注,全球销量超过一万台。
大象机器人希望通过新一代尖端科技推动机器人产业发展,携手客户及合作伙伴共同开启自动化智能化新时代。
原文标题:行业方案 | 带机器视觉识别的六轴协作机械 myCobot - 教育解决方案
文章出处:【微信公众号:NVIDIA英伟达】欢迎添加关注!文章转载请注明出处。
审核编辑:汤梓红
-
机器人
+关注
关注
210文章
28231浏览量
206615 -
Linux
+关注
关注
87文章
11232浏览量
208952 -
机器视觉
+关注
关注
161文章
4348浏览量
120134
原文标题:行业方案 | 带机器视觉识别的六轴协作机械 myCobot - 教育解决方案
文章出处:【微信号:NVIDIA_China,微信公众号:NVIDIA英伟达】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
使用myAGV、Jetson Nano主板和3D摄像头,实现了RTAB-Map的三维建图功能!
工业机器人和机械臂的设计、功能和应用有哪些区别?
开源六轴协作机器人myCobot 320结合人脸表情识别情绪!


大象机器人开源协作机械臂机械臂接入GPT4o大模型!

基于六维力传感器的机械臂自动装配应用

大象机器人开源协作机械臂myCobot 630 全面升级!
自然语言控制机械臂:ChatGPT与机器人技术的融合创新(下)

myCobot Pro 630 焕新上市!全面助力六自由度协作机器人商用化进程推进!
如何去提升机械臂的位置控制性能?

大象机器人六轴协作机械臂myCobot 320 进行手势识别!

使用ChatGPT学习大象机器人六轴协作机械臂mechArm!

宏集七轴机械臂,以精准力控实现柔性抛光打磨!

【开源获奖案例】四轴机械臂控制系统

七轴开源协作机械臂myArm视觉跟踪技术!





 工商网监
工商网监
评论