 基于Vitis HLS的加速图像处理
基于Vitis HLS的加速图像处理
1、unified2020.1
linux ubuntu18.04.2
推荐文档链接:
https://xilinx.github.io/Vitis_Libraries/vision/2020.1/overview.html#hls...
https://forums.xilinx.com/t5/High-Level-Synthesis-HLS/Using-Vitis-Vision...
https://github.com/Xilinx/Vitis_Libraries
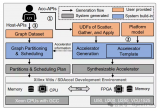
Vitis Vision库是OpenCV和Vision功能的加速库,可在Vitis环境中使用,这些库的L1目录是示例设计。为了适应各种用户环境,从2020.1版本开始,Xilinx不再使用Vivado / Vitis工具提供预安装的OpenCV版本。尽管Vitis_hls编译Vision库不需要OpenCV,但是用户测试验证使用时OpenCV。
2、linux下安装opencv(opencv-3.4.12)
链接:https://opencv.org/releases/
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev libjpeg.dev libtiff4.dev
unzip opencv-3.4.12.zip
cd opencv-3.4.12
mkdir build
cd build
cmake -DCMAKE_BUILD_TYPE=Release -DOPENCV_GENERATE_PKGCONFIG=ON -DCMAKE_INSTALL_PREFIX=/usr/local …
make -j8
sudo make install
ldconfig -p |grep opencv
sudo ldconfig -v
qt中测试,报错 failed to load module “canberra-gtk-module”
sudo apt-get install libcanberra-gtk-module
3、在vitis library中 每个类别提供三种代码
L1:最低级的代码,旨在用高级综合工具综合后,可以在Vitis(逻辑)中实现这些功能,或将其用作新IP开发的一部分。
L2:中间级可以在Vitis中实现功能(逻辑)。不太懂也不关心!
L3:最高级提供了由多个加速内核创建的应用程序。不太懂也不关心!
4、在linux系统中测试
(1)复制L1/examples中的sobelfilter
(2)将build文件复制到文件夹(xf_config_params.h)这个文件存放的是滤波器的参数
(3)在data中辅助一个128x128的png图像
(4)配置hls运行前的环境
source /settings64.sh
export OPENCV_INCLUDE=
export OPENCV_LIB=
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:
(5)在此终端打开vitis_hls
(6)新建hls工程
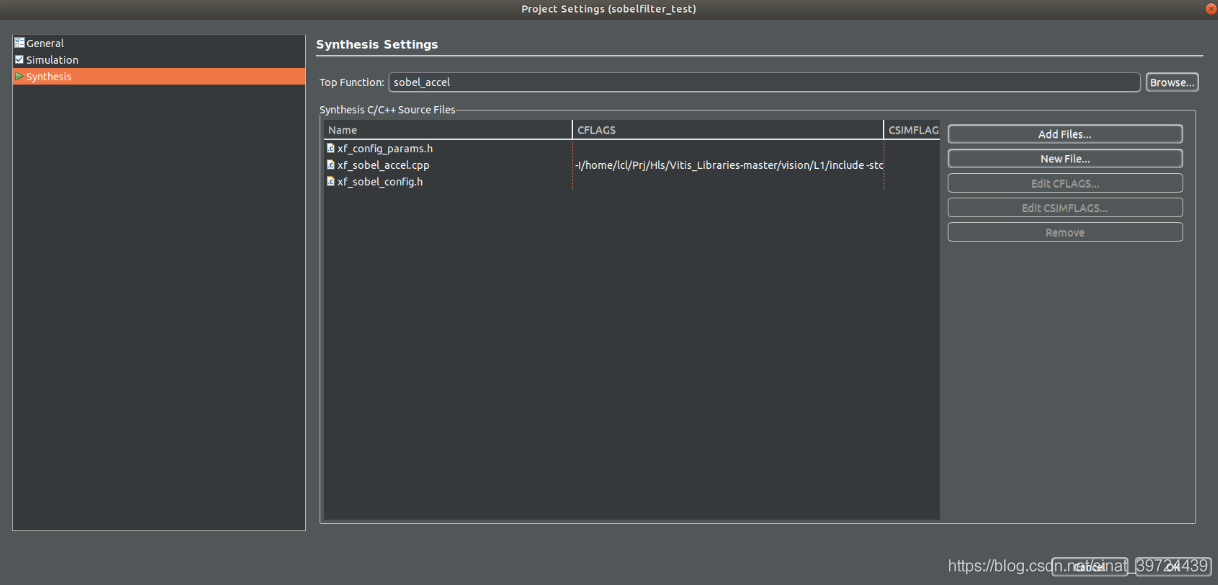
(7)添加源文件中所需的.cpp 和.h 并且在cflags中添加
-I
-std=c++0x(其他调用的.h文件的路径,否则将头文件复制到一个文件夹)
(8)在tb的cflags中添加
-I
-std=c++0x -I
(其他调用的.h文件的路径,否则将头文件复制到一个文件夹)
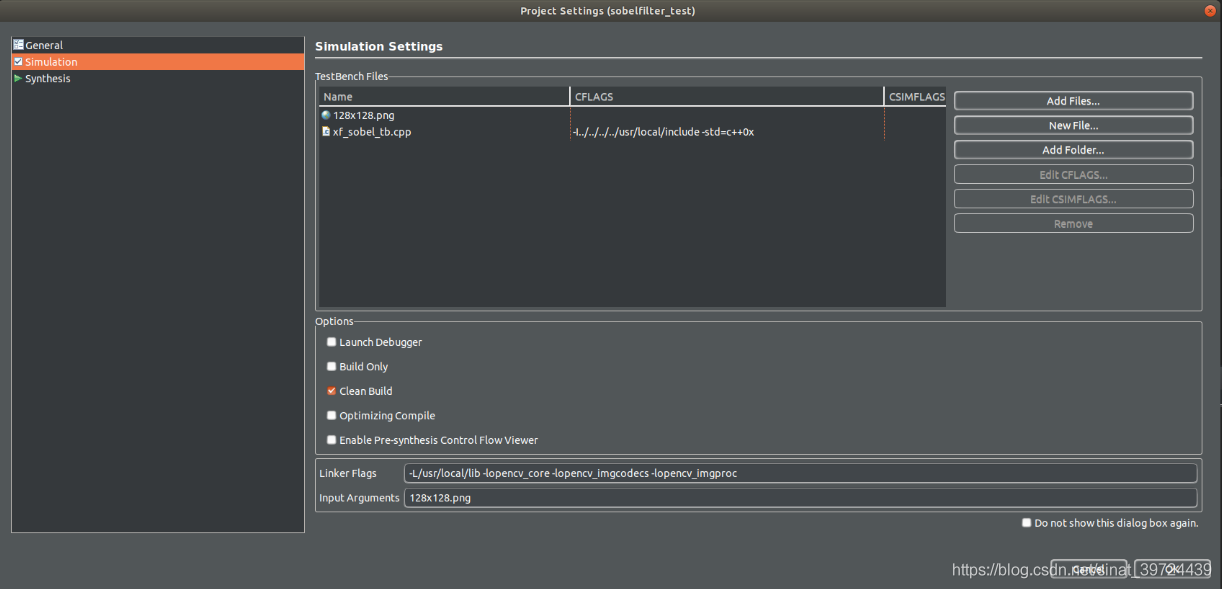
(9)在连接器 (linker flags)中添加
-L
-lopencv_core -lopencv_imgcodecs -lopencv_imgproc
(10)在输入(input arguments)中输入图片名称
(11)保存
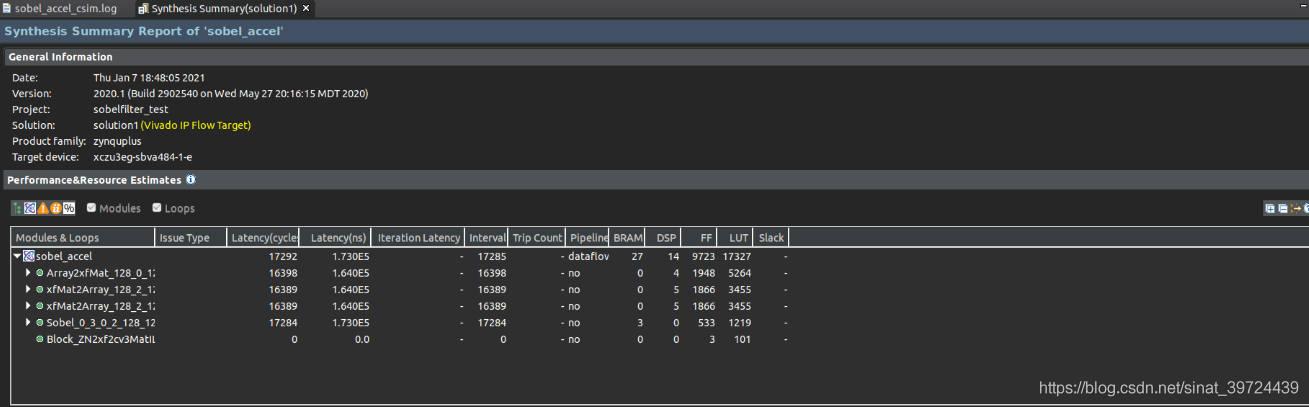
5、点击综合
6、点击仿真
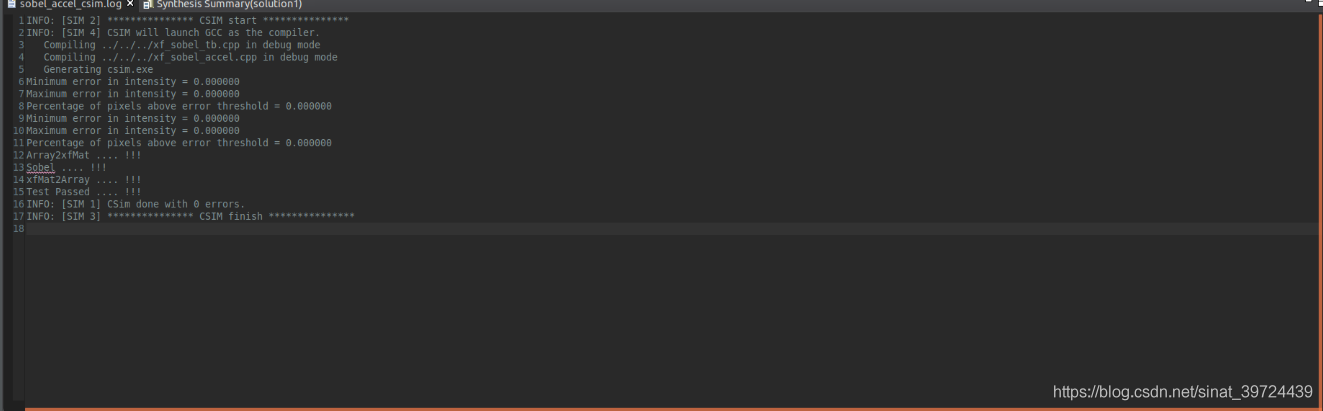
7、实验现象
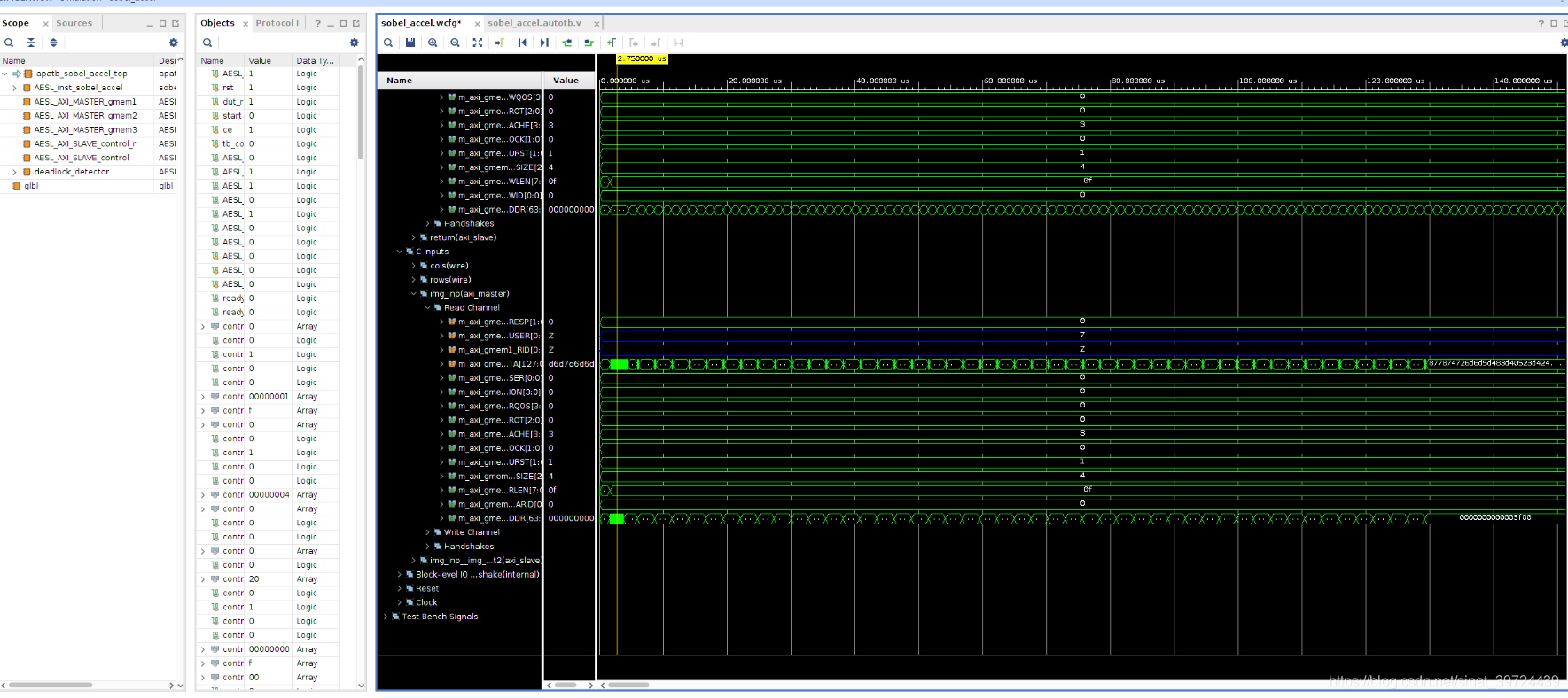
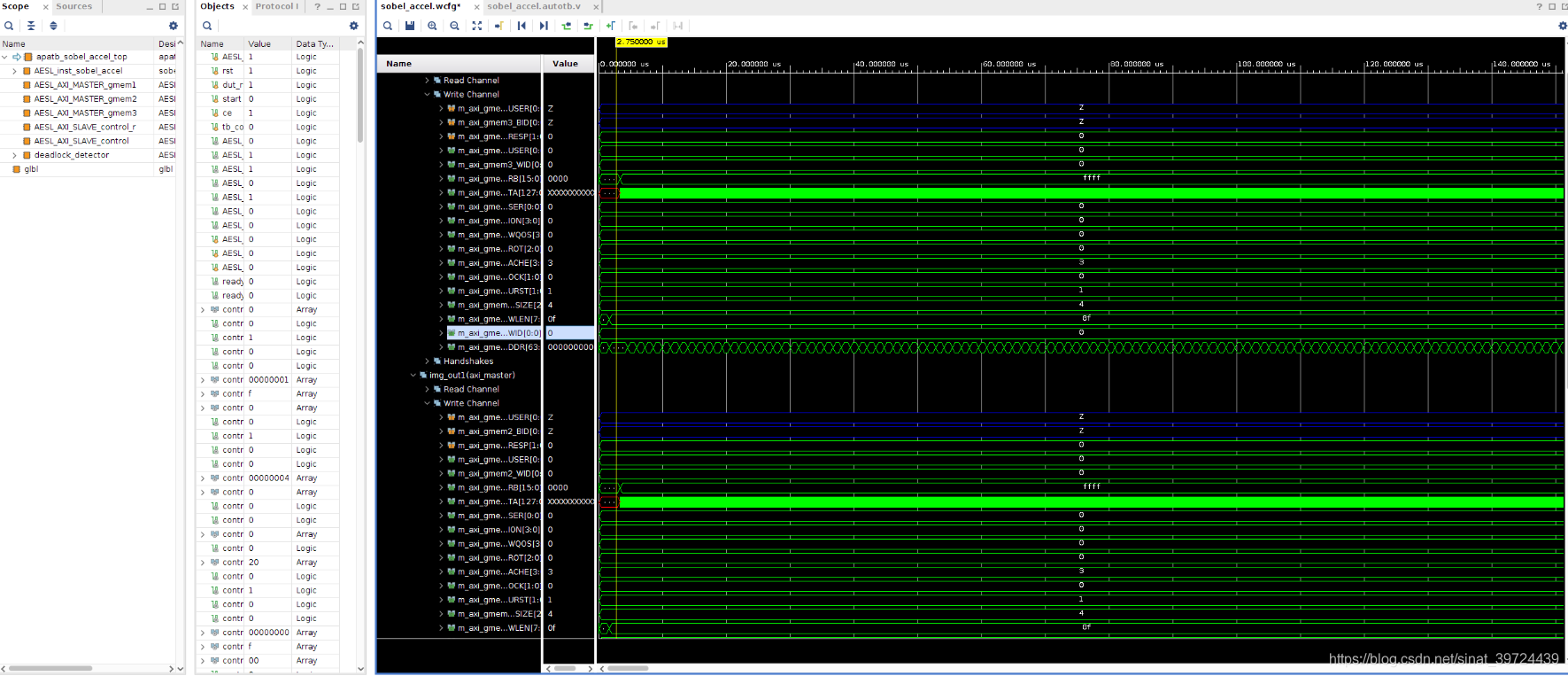
8、协同仿真

9、信号太多,挑模块的输入输出即可,否则除非内存很大,不然会卡死。
输入数据
输出数据
审核编辑:符乾江
-
图像处理
+关注
关注
27文章
1279浏览量
56608 -
Vitis
+关注
关注
0文章
145浏览量
7394
发布评论请先 登录
相关推荐
图像处理器是什么意思
AMD Vitis™设计工具中的Libraries新功能介绍
基于FPGA的实时边缘检测系统设计,Sobel图像边缘检测,FPGA图像处理
在Windows 10上创建并运行AMD Vitis™视觉库示例

FPGA版通用图形处理架构创新解决方案
Vitis2023.2使用之—— updata to Vitis Unified IDE
Vitis2023.2使用之—— classic Vitis IDE

Vivado HLS的图像传感器FPN噪声去除算法设计

AMD-Xilinx的Vitis-HLS编译指示小结
CamSim相机模拟器:极大加速图像处理开发与验证过程
Vitis 统一软件平台文档
研讨会:利用编译器指令提升AMD Vitis™ HLS 设计性能






 工商网监
工商网监
评论