 详解Board和SoC解耦的设计思路
详解Board和SoC解耦的设计思路

摘要
本文简单介绍OpenHarmony轻量系统移植,Board和SoC解耦的设计思路。适合自己动手移植OpenHarmony轻量系统的朋友们。开始尝试讲解一下系统的移植,主要是轻量系统,也可能会顺便讲下L1移植。
对应的是 01_vendor_soc_board

1、hb编译原理
当我们输入hb set命令后,会提示我们选择要编译构建的工程。
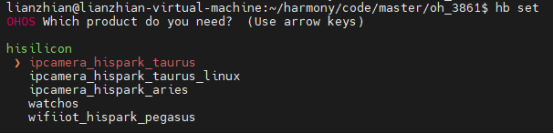
那么,hb 怎么知道有哪些工程可以编译呢?
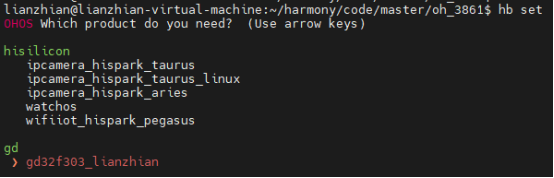
事实上这些工程都是在vendor文件夹中的,为了验证,我们可以在vendor中创建一个空的文件夹:gd,然后gd文件夹下面又创建了gd32f303_lianzhian文件夹。
但是这里还不够,一个标准简单的vendor文件夹结构如下:
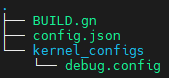
其中debug.config内容为空即可,因为它的内容是自动生成的,后面我们配置的内核的时候需要用到。
这几个文件我们可以直接复制3861的过来,然后删去我们不需要的子系统,我们只需要保留如下即可:
config.json文件:
{"product_name": "gd32f303_lianzhian","type": "mini","version": "3.0","device_company": "lianzhian","board": "gd32f303_lianzhian","kernel_type": "liteos_m","kernel_version": "","subsystems": [{"subsystem": "kernel","components": [{ "component": "liteos_m","features":[]}]}],"third_party_dir": "","product_adapter_dir": ""}
向右滑动查看完整代码
BUILD.gn文件:
group("gd32f303_lianzhian") {}
向右滑动查看完整代码
此时,我们再去执行hb set,就可以看到我们自己创建的工程了:gd32f303_lianzhian
2、设计思想
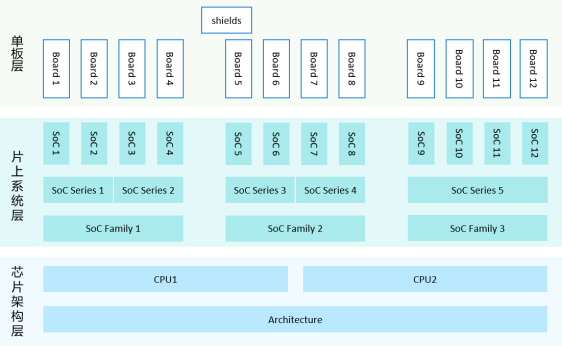
最新的master分支的代码设计采用Board和SoC解耦的设计思路,具体可以看这个文章:按照硬件进行层次划分为芯片架构层、片上系统层和单板层。从下向上依次进行包含关系,例如:
(1)架构
ARMv7E-M架构具有ARM Cortex-M4, ARM Cortex-M7等CPU实现。
(2)芯片系列
ARM Cortex-M4 CPU对应的SoC Family有STmicro STM32、NXP i.MX等,反过来,如图SoC Family 2跨越CPU1和CPU2,意味着一个SoC Family可以包含多个CPU实现,例如STMicro STM32可以包含Cortex-M0、Cortex-M4等CPU,又例如复杂的STM32MP157 SoC包含两个Cortex-A7 CPU核与一个Cortex-M4 CPU核,对于异构多核SoC,需要通过OpenAMP来进行分解成多个同构多核的部分。
(3)芯片与开发板对应关系
STM32 SoC Family有STM32F4、STM32G4等SoC Series。
STM32F4 SoC Series 有 STM32F401、STM32F429等SoC。
STM32F429 SoC 有 野火STM32F429挑战者开发板、正点原子stm32f429阿波罗开发板等。
如图Board 5上面还有一个shields,意味着一个Board可以通过增加扩展板的形式来提供更强的功能。例如,单板可以利用串口通信外接Hi3861模组,以提供WLAN能力。
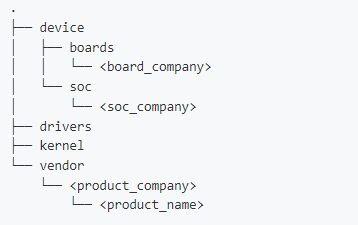
基于硬件结构划分层次图,OpenHarmony顶层目录结构设计如下:
3、board配置
1)创建 board文件夹当我们输入hb set命令后,我们选择 gd32f303_lianzhian 可以看到会提示报错:我们需要创建该文件夹:device/board/lianzhian,为啥是lianzhian ?
因为我们在vendor中的config.json中指定了device_company 设备厂家是lianzhian,大家可以回头看看,标准的board文件夹目录结构如下:
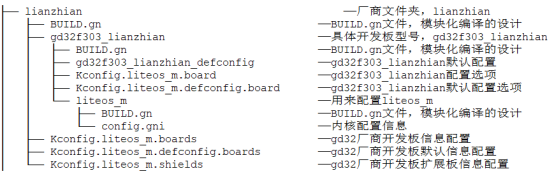
2)Kconfig配置文件
我们可以在kernel/liteos_m内核目录下执行make menuconfig进行图形化配置,Makefile文件会遍历board下的所有Kconfig文件,所以我们需要添加对应的Kconfig文件。
这里内核是分层设计的,即厂商配置和具体开发板分开,一个厂商下面可以有多个开发板。
例如我们现在移植的设备厂商是是lianzhian,那么lianzhian是厂商文件夹,lianzhian下面有Kconfig,主要是厂商级别的配置。
然后lianzhian下面可以有多个开发板,我们这里只写了gd32f303_lianzhian开发板。同样gd32f303_lianzhian文件夹下面也有Kconfig配置文件。
3)厂商Kconfig配置文件
我们先看下lianzhian厂商的Kconfig文件
(1)Kconfig.liteos_m.boards 文件内容:
orsource "*/Kconfig.liteos_m.board"
可以看到很简单,事实上它就是简单的把当前目录下的所有文件夹下的Kconfig.liteos_m.board文件都导入进来。
(2)Kconfig.liteos_m.defconfig.boards文件
orsource "*/Kconfig.liteos_m.defconfig.board"
同样把当前目录下的所有文件夹下的Kconfig.liteos_m.defconfig.board文件都导入进来。
(3)Kconfig.liteos_m.shields 文件
这里我们暂时不需要,可以内容为空
4)具体开发板的Kconfig配置文件
我们先看下gd32f303_lianzhian厂商的Kconfig文件。
(1)Kconfig.liteos_m.board文件:
需要配置选择该单板的选项,以及它依赖的SoC
config BOARD_GD32F303_LIANZHIANbool "select board gd32f303 lianzhian"depends on SOC_GD32F303 #只有当我们芯片型号选择为GD32F303时才可见
向右滑动查看完整代码
这里是增加一个配置选项,即后面我们可以在make menuconfig中看到"select board gd32f303 lianzhian"配置项。
(2)Kconfig.liteos_m.defconfig.board 文件
需要配置选择该单板后,默认定义 BOARD 的名字,该文件我们可以留空,也可以如下配置:
if BOARD_GD32F303_LIANZHIANconfig BOARDstringdefault "gd32f303_lianzhian"endif #BOARD_GD32F303_LIANZHIAN
向右滑动查看完整代码
(3)gd32f303_lianzhian_defconfig 文件
内容为:
LOSCFG_BOARD_GD32F303_LIANZHIAN=yLOSCFG_SOC_SERIES_GD32F303=yLOSCFG_SOC_GD32F303ZET6=y
向右滑动查看完整代码
这里表示我们选中的板卡、SOC、SOC具体子型号系列等。
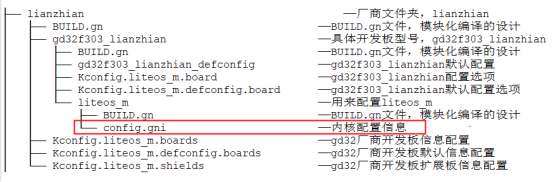
5)config.gni配置文件
liteos_m文件夹下的config.gni文件是用来进行内核配置的
该文件内容如下:
# Copyright (C) 2020 Hisilicon (Shanghai) Technologies Co., Ltd. All rights reserved.# 选择内核类型, e.g. "linux", "liteos_a", "liteos_m".kernel_type = "liteos_m"# 内核版本,留空即可.kernel_version = ""# 芯片架构, e.g. "cortex-a7", "riscv32".board_cpu = "cortex-m4"# 这里一般不用谢, e.g. "armv7-a", "rv32imac".board_arch = ""# Toolchain name used for system compiling.# E.g. gcc-arm-none-eabi, arm-linux-harmonyeabi-gcc, ohos-clang, riscv32-unknown-elf.# Note: The default toolchain is "ohos-clang". It's not mandatory if you use the default toolchain.# 交叉编译器名称board_toolchain = "arm-none-eabi-gcc"# The toolchain path instalLED, it's not mandatory if you have added toolchain path to your ~/.bashrc.# 这里一般可以不写board_toolchain_path = ""# 交叉编译器Compiler prefix.board_toolchain_prefix = "arm-none-eabi-"# 编译器类型 Compiler type, "gcc" or "clang".board_toolchain_type = "gcc"# 编译选项Board related common compile flags.board_cflags = ["-mcpu=cortex-m4","-mfpu=fpv4-sp-d16","-mfloat-abi=hard","-mthumb","-Og",# "-g",#"-Wall","-fdata-sections","-ffunction-sections",# 注意,这里我们需要定义GD32F30X_HD宏"-DGD32F30X_HD",# 我们需要浮点数计算"-D__FPU_PRESENT",]board_cxx_flags = board_cflagsboard_ld_flags = []# 头文件路径,一般需要soc相关 Board related headfiles search path.board_include_dirs = ["${ohos_root_path}device/soc/gd32/gd32f303/liteos_m","${ohos_root_path}device/soc/gd32/CMSIS","${ohos_root_path}device/soc/gd32/CMSIS/GD/GD32F30x/Include","${ohos_root_path}device/soc/gd32/gd32f303/GD32F3XX_Driver/Inc","${ohos_root_path}device/soc/gd32/gd32f303","${ohos_root_path}utils/native/lite/include","${ohos_root_path}kernel/liteos_m/components/cpup","${ohos_root_path}kernel/liteos_m/components/exchook",]# 开发板用到哪个soc Board adapter dir for OHOS components.board_adapter_dir = "${ohos_root_path}device/soc/gd32"# Sysroot path.board_configed_sysroot = ""# Board storage type, it used for file system generation.storage_type = ""
向右滑动查看完整代码
4、SOC配置
1)创建 SOC文件夹我们进入到device/soc文件夹,创建 gd32文件夹,gd32文件夹内容如下:
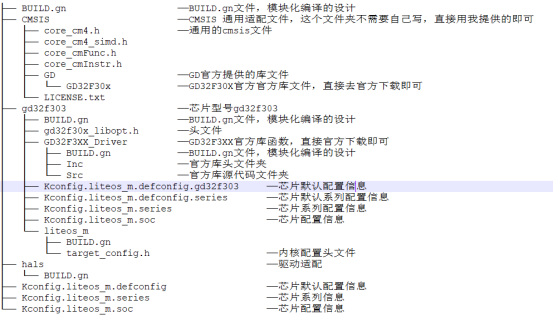
其中GD32官方标准库文件和CMSIS都可以在GD官网下载到,而且不需要我们修改编写,故而本节不会讲其中的内容,重点放在Kconfig配置文件中。
同样,soc也是分为芯片厂家的Kconfig 和具体芯片信号的Kconfig,gd32是芯片厂家,gd32f303只是其中的一款型号而已。
2)gd32芯片厂家Kconfig配置文件
(1)先看Kconfig.liteos_m.soc文件
config SOC_COMPANY_GD32boolif SOC_COMPANY_GD32config SOC_COMPANYdefault "gd32"rsource "*/Kconfig.liteos_m.soc"endif # SOC_COMPANY_GD32
向右滑动查看完整代码
这里很简单,就是配置我们的芯片厂商默认为 gd32,之后导入所有文件夹的 Kconfig.liteos_m.soc 配置文件。
(2)Kconfig.liteos_m.series文件
这个文件就比较简单了,导入所有文件夹的 Kconfig.liteos_m.series 配置文件
rsource "*/Kconfig.liteos_m.series"
向右滑动查看完整代码
(3)Kconfig.liteos_m.defconfig
同样,导入所有文件夹的Kconfig.liteos_m.defconfig
rsource "*/Kconfig.liteos_m.defconfig.series"
向右滑动查看完整代码
3)gd32F303芯片的Kconfig配置文件
我们来看看具体的芯片型号gd32f303的配置文件吧
(1)Kconfig.liteos_m.series文件
需要配置芯片系列,以及它的芯片架构等信息,内容:
config SOC_SERIES_GD32F303bool "GD32F303 chip"select ARMselect SOC_COMPANY_GD32select CPU_CORTEX_M4helpEnable support for GD32F303
向右滑动查看完整代码
这个是芯片系列的选择,我们的芯片系列是GD32F303,架构是ARM、CORTEX_M4 芯片厂家是 SOC_COMPANY_GD32,这个在上一级gd32的Kconfig配置文件中有定义。
(2)Kconfig.liteos_m.soc文件
需要配置芯片系列有多少个型号的芯片。内容:
choiceprompt "GD32F303 series SoC"depends on SOC_SERIES_GD32F303 #只有选择了芯片系列SOC_SERIES_GD32F303后才会出现如下选项config SOC_GD32F303ZET6 #增加一个SOC_GD32F303ZET6选项,我们现在只有GD32F303ZET6,后面可以还有GD32F303RCT6等。bool "SoC GD32F303ZET6"endchoice
向右滑动查看完整代码
(3)Kconfig.liteos_m.defconfig.series 文件
选择芯片系列后默认的配置,内容:
if SOC_SERIES_GD32F303rsource "Kconfig.liteos_m.defconfig.gd32f303"config SOC_SERIESstringdefault "gd32f303"config NUM_IRQS #中断数量,跟具体芯片相关intdefault 90config SYS_CLOCK_HW_CYCLES_PER_SEC #时钟周期,GD32F303是120MHzintdefault 120000000endif
向右滑动查看完整代码
(4)Kconfig.liteos_m.defconfig.gd32f303 文件
Gd32f303的配置,内容比较简单:
config SOCstringdefault "gd32f303zet6"depends on SOC_GD32F303ZET6
向右滑动查看完整代码
默认是gd32f303zet6,至此我们的soc的kconfig配置基本完成。
4)内核配置头文件
还有一个比较重要的内核配置头文件,target_config.h。这个大家可以直接复制我的就行,主要是内核功能配置相关。
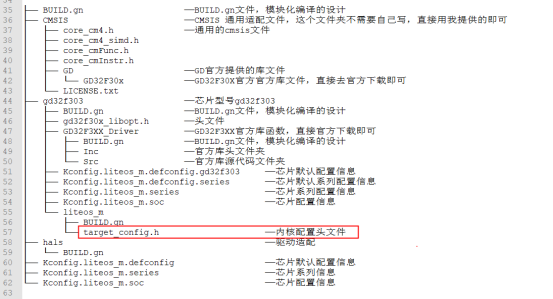
其中有一个比较重要的配置项:
/*** @ingroup los_config* Memory size*/
向右滑动查看完整代码
这个是配置内核的堆栈大小,这里可以根据自己芯片的内存大小来定,GD32F303内存是64KB,这里我用60k即可。
5、make menuconfig配置
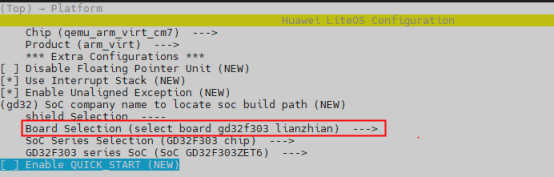
完成上面移植内容后,接下来,我们就可以进行menuconfig配置了。注意,这里我们需要先执行一次hb set选择我们的开发板gd32f303_lianzhian。我们进入 kernel/liteos_m 文件夹执行 make menuconfig
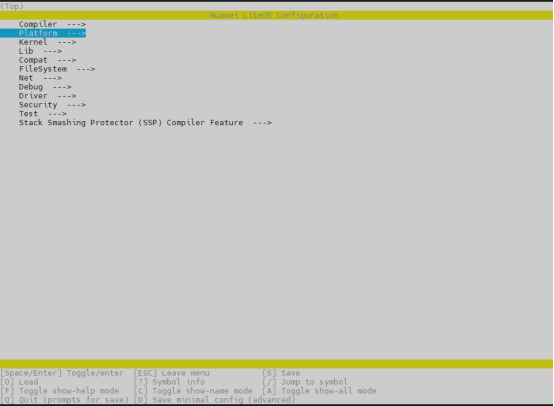
进入Platform,我们选择gd32f303芯片、gd32f303_lianzhian开发板,如下:
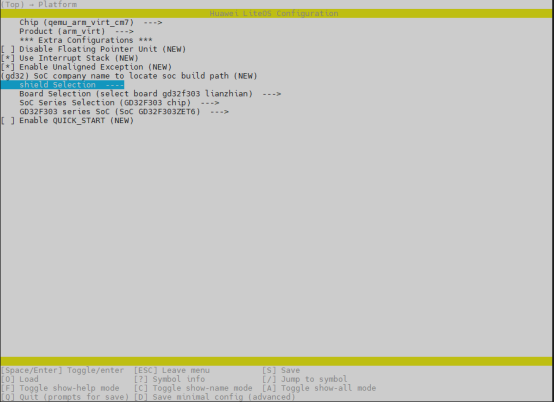
退出保存。结果将自动保$(PRODUCT_PATH)/kernel_configs/debug.config
6、gn编译
在上一步Kconfig的图形化配置后,将其生成的配置结果可以作为gn编译的输入,以控制不同模块是否编译。另外为了解决之前gn编写时,随意include的问题,内核编译做了模块化编译的设计,使得整个编译逻辑更加清晰。我们需要编写device/board/lianzhian 和 device/soc/gd32两个文件夹下的BUILD.gn。
这几个BUILD.gn文件比较简单,都是模块化编译,大家可以直接参考我的。
7、开始编译
配置完BUILD.gn后,我们就可以开始执行hb build -f编译了。可以看到已经能编译过一大半了:
我们今天的目标就是要能让编译系统能开始编译我们的开发板一步一脚印,接下来我们将继续开始移植,接下来将配置libc库、系统启动、main函数、链接脚本,直到编译通过并且在开发板中成功运行~
本节Board和SoC解耦的设计思路就分享到这里了,下一篇我们给大家分享:Board、SOC、架构与代码对应关系,欢迎大家持续关注哦~
原文标题:从零移植OpenHarmony轻量系统【2】Board和SoC解耦的设计思路
文章出处:【微信公众号:HarmonyOS官方合作社区】欢迎添加关注!文章转载请注明出处。
-
soc
+关注
关注
40文章
4624浏览量
230167 -
移植
+关注
关注
1文章
417浏览量
29533 -
OpenHarmony
+关注
关注
33文章
3974浏览量
21356
原文标题:从零移植OpenHarmony轻量系统【2】Board和SoC解耦的设计思路
文章出处:【微信号:HarmonyOS_Community,微信公众号:电子发烧友开源社区】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
求助解答关于异步电机矢量控制中磁链环和电压前馈解耦问题??
永磁同步电机偏差解耦和电流前馈解耦控制比较
常用的解耦设计方法
从零移植OpenHarmony轻量系统【1】移植思路
从零移植OpenHarmony轻量系统【2】Board和SoC解耦的设计思路
多变量解耦控制实验
基于补偿器的解耦控制方法的研究
基于H∞混合灵敏度解耦控制器实现BTT导弹自动驾驶仪的解耦设计
电容解耦如何放置
永磁同步电机控制之反馈解耦及复矢量解耦




评论