 机器人程序中断与相应的恢复方式
机器人程序中断与相应的恢复方式
1. 概述
机器人程序在运行过程中,可能会因为人为操作或报警的原因而发生程序中断。本文就机器人程序中断与相应的恢复方式进行简单介绍。
2. 程序中断
程序的执行状态分执行、结束、暂停三种,表1中展示了程序的两种停止状态间的差异。
表1 结束与暂停

造成程序中断的情况如下:
(1)人为停止
a. 按下示教盒或控制柜面板上的急停;
b. 外围设备I/O的*IMSTP输入;
c. 松开DEADMAN开关;
d. 示教盒【暂停】(HOLD)按键;
e. 外围设备I/O的*HOLD输入。
(2)发生报警
若发生报警使程序中断,可通过MENU—【报警】(ALARM),查看相应报警信息。
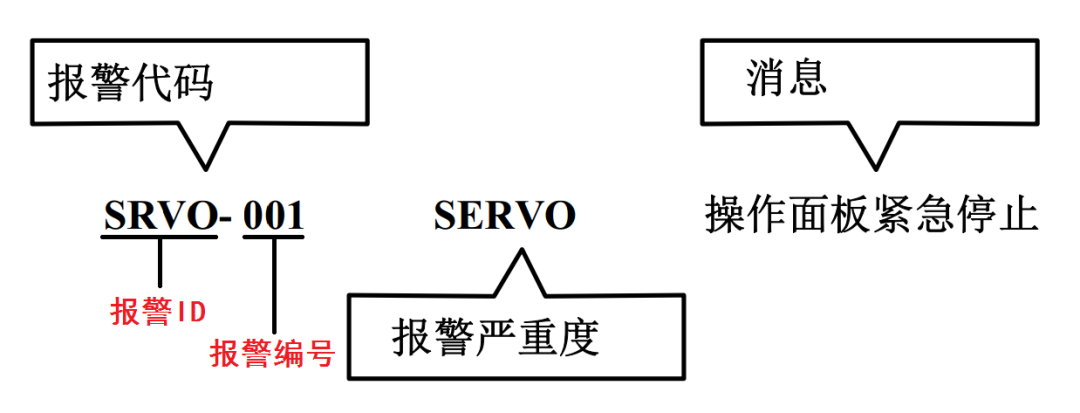
图1 报警示例
标准报警语句形式如图所示,由报警代码、报警严重程度和报警消息组成。报警严重程度的不同将决定是否停止机器人的动作,以及是否断开伺服电源。不同报警重要程度表2所示:
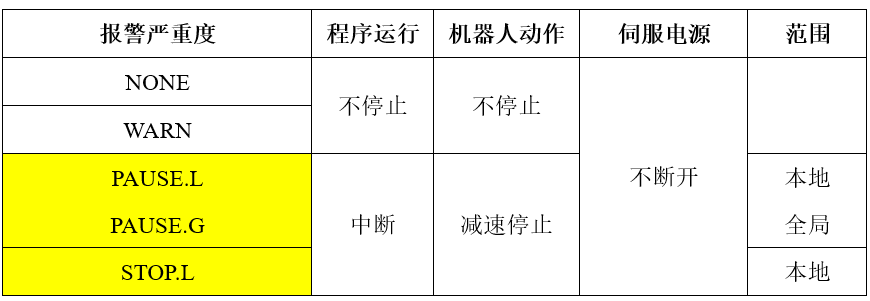
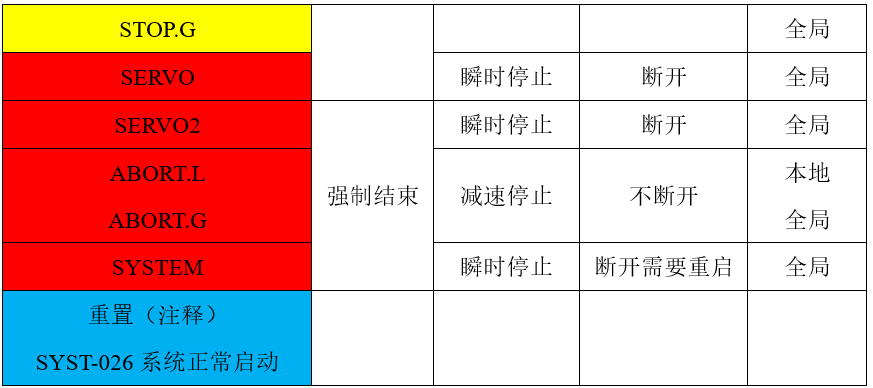
表2 报警严重度
3. 程序恢复
恢复程序的执行时,用户可根据如下步骤进行:
a. 根据不同的中断原因进行故障排除;
b. 恢复程序的执行。
3.1 解除不同原因引发的暂停状态
(1)急停的解除
如果按下示教盒或控制柜面板上的急停按钮,机器人会瞬时停止,执行中的程序被中断,并发生急停报警显示在示教盒画面上,报警指示灯点亮,此时急停按钮被锁定。
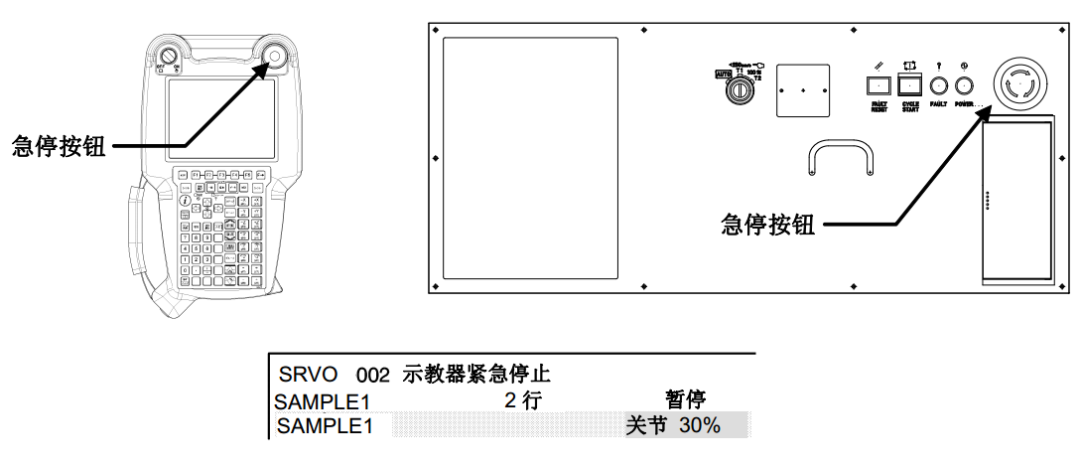
图2 通过急停操作来停止程序
恢复方法如下:
a. 排除导致急停的原因;
b. 旋转急停按钮解除其锁定状态;
c. 点击示教盒或控制柜面板上的RESET键,则示教盒报警信息消失,报警指示灯熄灭。
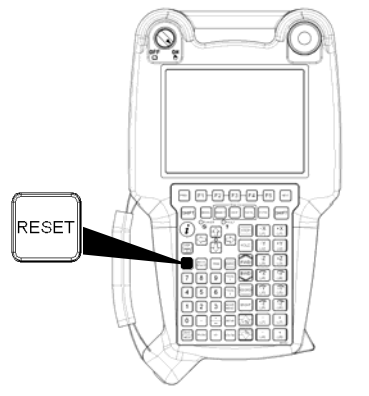
图3示教盒复位键(RESET)
(2)HOLD的解除
按下示教器上的HOLD键,机器人减速后停止,执行中的程序被中断,暂停指示灯点亮。此时,重新启动程序,暂停即被解除。
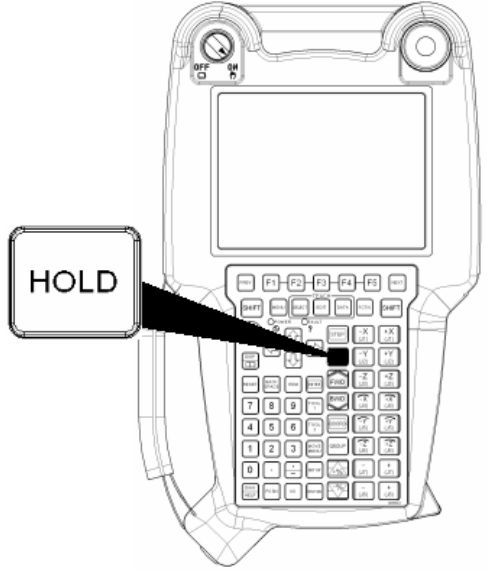
图4示教盒暂停键(HOLD)
(3)报警的解除
当程序执行失败或者外部设备输入了急停/报警信号,示教盒显示画面会出现报警,机器人运动停止,程序暂停或者结束。
恢复方法如下:
a. 通过报警指示灯或是示教盒状态栏的第一、二行可以确认是否有报警发生。
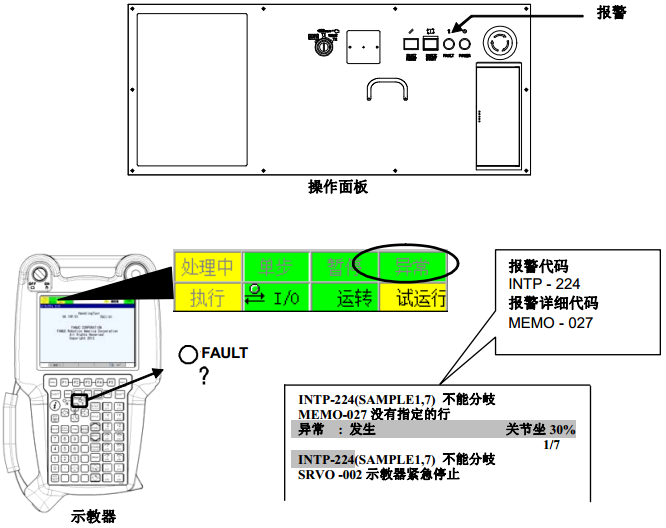
图5 确认报警信息
通过MENU-【报警】(Alarm)-【报警日志】(Alarm log)-F3【履历】(Hist)。

图6 报警履历界面
b. 排除导致报警的原因;
c. 点击示教盒或控制柜面板上的RESET键,示教盒报警消失,报警指示灯熄灭。
3.2 恢复程序执行
(1)恢复程序执行
故障解除后,若要恢复程序执行,则根据如下步骤操作:
a. 找出程序暂停时的实际行号:MENU-【下一页】(NEXT)-【状态】(STATUS)-【执行历史记录】(Exec-hist);
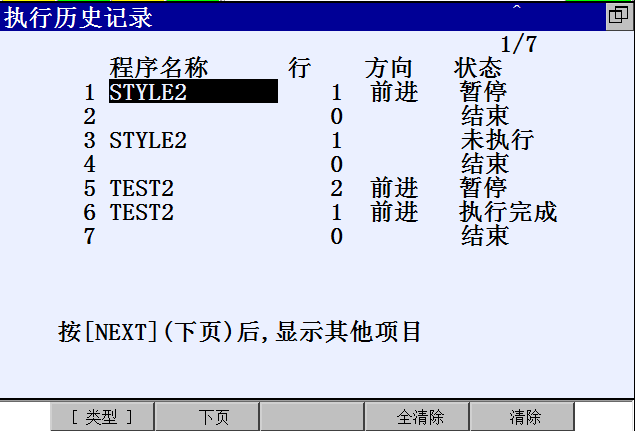
图7 程序执行历史记录
b. 进入程序编辑界面;
c. 手动执行到暂停行或执行顺序的上一行;
d. 通过START信号(自动时)/通过SHIFT键+FWD键(手动时),恢复程序的执行。
(2)启动新程序
若想要执行一个新的程序或本程序从新的行开始执行,则根据如下步骤操作:
a. 通过FCTN-中止程序(Abort (ALL))或CSTOPI(UI[4])信号使程序结束;
b. 通过START信号(自动时)/通过SHIFT键+FWD键(手动时)重新启动程序。
审核编辑 :李倩
-
机器人
+关注
关注
212文章
28910浏览量
209645 -
程序
+关注
关注
117文章
3806浏览量
81707
原文标题:干货 | FANUC机器人程序中断与解除恢复操作说明
文章出处:【微信号:AMTBBS,微信公众号:世界先进制造技术论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论