 如何从RGBD相机提取像素的深度信息
如何从RGBD相机提取像素的深度信息
图像
灰度图
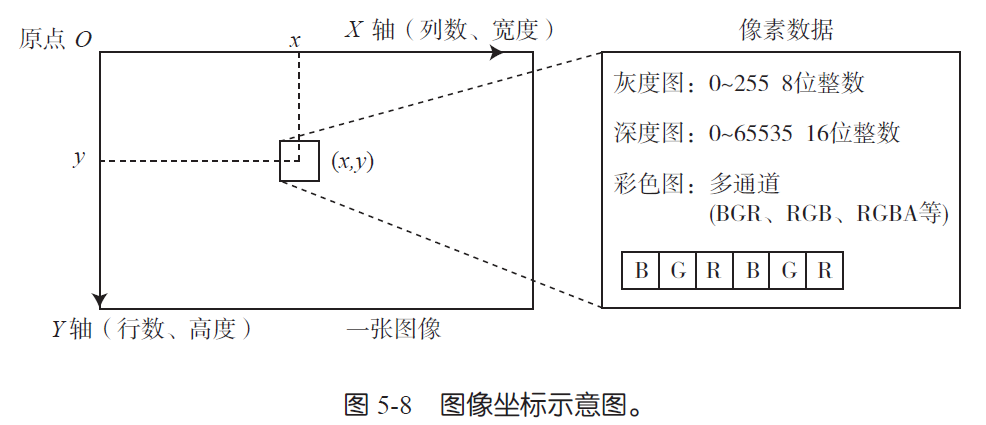
灰度是描述灰度图像内容的最直接的视觉特征。它指黑白图像中点的颜色深度,范围一般从0到255,白色为255,黑色为0,故黑白图像也称灰度图像。灰度图像矩阵元素的取值通常为[0,255],因此其数据类型一般为8位无符号整数,这就是人们通常所说的256级灰度。
灰度图:一个像素的灰度可以用8 位整数记录,也就是一个0~255的值。
深度图
当我们要记录的信息更多时,一个字节就不够了。
在RGB-D相机的深度图中,记录了各个像素与相机之间的距离。这个距离通常是以毫米为单位,而RGB-D 相机的量程通常在十几米左右,超过了255。
人们会采用16 位整数(C++ 中的unsigned short)来记录深度图的信息,也就是位于0~65535 的值。换算成米的话,最大可以表示65 米,足够RGB-D 相机使用了。
彩色图
彩色图像的表示则需要通道(channel)的概念。在计算机中,我们用红色、绿色和蓝色这三种颜色的组合来表达任意一种色彩。于是对于每一个像素,就要记录其R、G、B 三个数值,每一个数值就称为一个通道。例如,最常见的彩色图像有三个通道,每个通道都由8 位整数表示。在这种规定下,一个像素占据24 位空间。
通道的数量、顺序都是可以自由定义的。在OpenCV 的彩色图像中,通道的默认顺序是B、G、R。也就是说,当我们得到一个24 位的像素时,前8 位表示蓝色数值,中间8 位为绿色,最后8 位
为红色。同理,亦可使用R、G、B 的顺序表示一个彩色图。如果还想表达图像的透明度,就使用R、G、B、A 四个通道。
RGB彩色图与灰度图之间的转换
彩色图像转换为灰度图像时,需要计算图像中每个像素有效的亮度值,其计算公式为:
Y = 0.299R + 0.578G + 0.114B
双目相机通过视差来计算深度。RGBD相机则可以主动测量每个像素的深度。
通过红外结构光(Structured Light)来测量像素距离的。例子有Kinect 1 代、Project Tango 1 代、Intel RealSense 等。
通过飞行时间法(Time-of-flight,ToF)原理测量像素距离的。例子有Kinect 2 代和一些现有的ToF 传感器等
RGBD相机原理图

深度图的保存
那么如何从RGBD相机提取像素的深度信息呢?
下面是一个简单的小程序,可以显示像素的深度信息.
#include "";
if(v%50==0||u%50==0)
cout<<endl;
}
}
}
return 0;
}
ConvertTo()函数
需要注意,其中的ConvertTo函数作用如下:
img: 图像数据来源,其类型为Mat。
注意: 不是所有格式的Mat型数据都能被使用保存为图片,目前OpenCV主要只支持单通道和3通道的图像,并且此时要求其深度为8bit和16bit无符号(即CV_16U),所以其他一些数据类型是不支持的,比如说float型等。如果Mat类型数据的深度和通道数不满足上面的要求,则需要使用convertTo()函数和cvtColor()函数来进行转换。
convertTo()函数负责转换数据类型不同的Mat,即可以将类似float型的Mat转换到imwrite()函数能够接受的类型。
而cvtColor()函数是负责转换不同通道的Mat,因为该函数的第4个参数就可以设置目的Mat数据的通道数(只是我们一般没有用到它,一般情况下这个函数是用来进行色彩空间转换的)。
另外也可以不用imwrite()函数来存图片数据,可以直接用通用的XML IO接口函数将数据存在XML或者YXML中。
具体含义,缩放并转换到另外一种数据类型:
dst:目的矩阵;
type:需要的输出矩阵类型,或者更明确的,是输出矩阵的深度,如果是负值(常用-1)则输出矩阵和输入矩阵类型相同;
scale:比例因子;
shift:将输入数组元素按比例缩放后添加的值;
dst(i)=src(i)xscale+(shift,shift,...)
原文标题:RGBD相机模型与图片处理
文章出处:【微信公众号:机器视觉智能检测】欢迎添加关注!文章转载请注明出处。
审核编辑:汤梓红
-
图像
+关注
关注
2文章
1089浏览量
40600 -
测量
+关注
关注
10文章
4963浏览量
111907 -
函数
+关注
关注
3文章
4350浏览量
63051
原文标题:RGBD相机模型与图片处理
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何从深度图像中找到3或5个中心像素
一种不依赖于棋盘格等辅助标定物体实现像素级相机和激光雷达自动标定的方法
如何以编程方式从STL库中提取版本信息?
基于VB6.0的点阵字模信息提取方法
利用超像素分割的信息选取算法
高像素时代里单反相机和无反相机格局会发生什么变化

基于全卷积神经网络的单像素边缘提取算法
RGBD相机模型与图片处理





 工商网监
工商网监
评论