 PTP测量指标与PTP同步系统检测方法
PTP测量指标与PTP同步系统检测方法

王辰生
书接上文,前几期我们介绍了IP测试工具和IP测量的思路,接下来三期就将基于项目中实际面对IP系统的测量经验和实践,针对性的介绍IP测量的实践内容。本期主要介绍PTP测量的相关内容。本文旨在交流探讨,如有不足,还请各位指正。
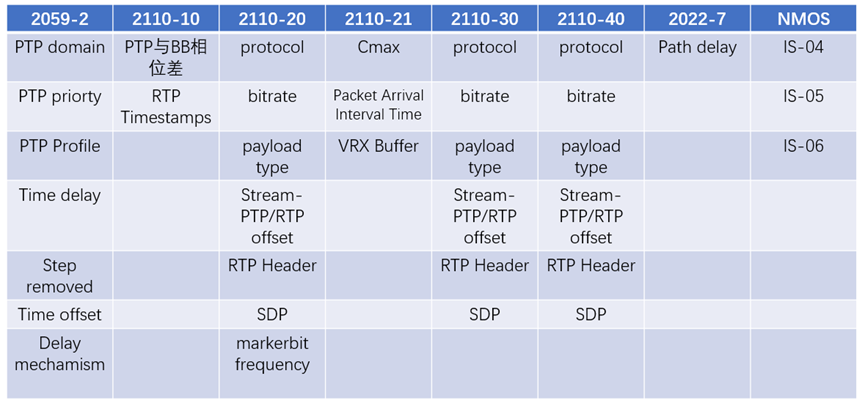
表4 基于标准/协议的测量指标
首先,我们还是从这张表来看,根据我们测量的内容,简单的把这些检测项分成4个大类,分别是:
1PTP同步的相关检测,主要涉及2059-2标准以及2110-10标准的一部分;
2流特征的检测,包含2110-10的部分,以及2110-20,-30,-40标准;
3传输特性的相关检测,主要有2110-21的流量整形检测和2022-7的冗余传输检测;
4控制方面的检测,涉及NMOS系列的标准,如IS-04,IS-05等。
根据我们的经验,目前阶段我们根据测量值将指标类型分为三种,分别是有明确标准值指标,有建议值或参考值指标,无规定值指标。建议值指标和无规定的指标只能作为定性分析的判断依据,无法作为判断信号是否合格的指标。
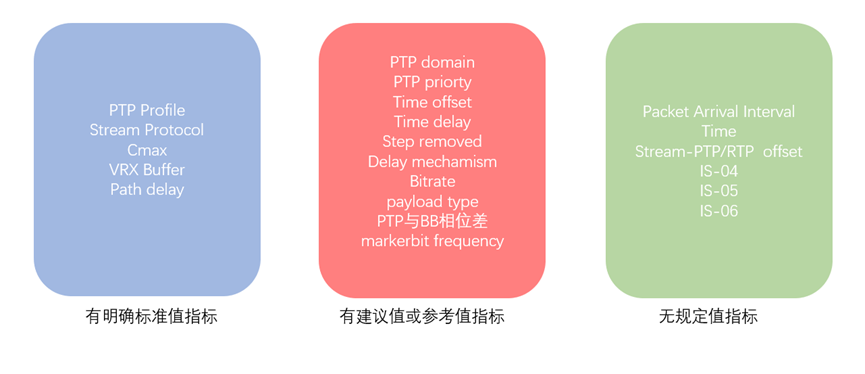
图30 参考值指标分类
一、PTP测量指标
同步是系统的基石,同步系统的稳定性直接关系到了整个系统的正常运行。这一部分主要涉及的标准是SMPTE 2110-10以及SMPTE 2059 。SMPTE在 2015年针对广电行业IP视音频传输特性,制定了基于IEEE 1588的ST2059标准。SMPTE 2059-1主要描述了以下技术:
SMPTE提出了自己的计时原点(SMPTE Epoch:1970.01.01.0000)
定义了信号与时间原点校准对齐的算法
定义了通过1588计算时间码(LTC,VITC)的算法
SMPTE 2059-2则是在IEEE 1588协议基础上,针对广播电视应用的特点,定义了ST2059 profile。在ST2110系列标准中,ST2110-10详细描述了ST2059如何在ST2110系统中应用。
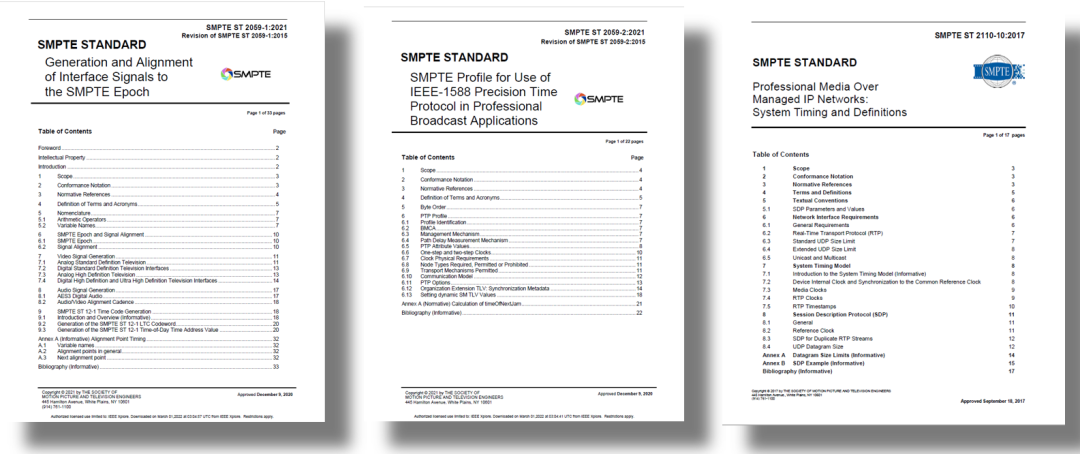
图31 SMPTE标准
在2019年和2021年,IEEE 1588和SMPTE 2059标准均有更新,新的标准中厘清了算法,允许announce报文的默认速率调整为1秒钟发送1次,增加了安全性和更多能被监控的特性,并修改了一些叫法,如将“master”改为“leader”,“slave”改为“follower”,例如主时钟“master clock”变为“leader clock”。下图简单列出了新的变化。
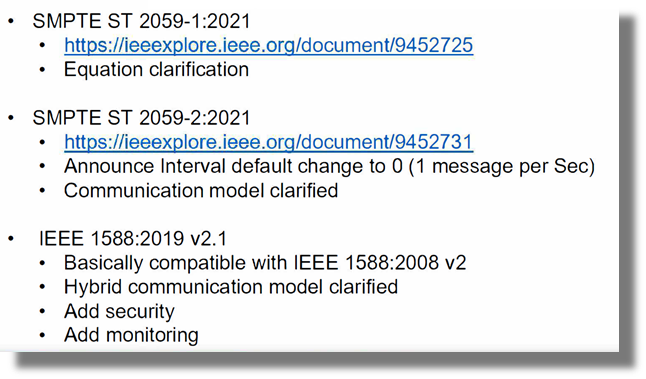
图32 标准变化
梳理标准,结合实战,汇总以下测量内容。
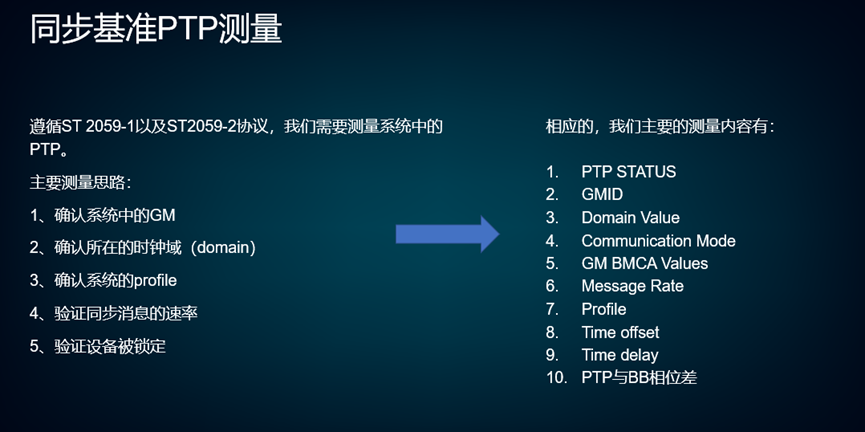
图33 PTP的测量
首先我们需要梳理系统中PTP的测量思路,根据系统的情况,需要提前确认和设定系统的GM,domain,PTP profile,使用厂家建议的message rate,最终检查设备被锁定的状态。根据这一思路,我们梳理出以下测试内容:
PTP status
GMID or Grandmaster ID
Domain
BMCA
Message Rate和PTP Profile
Time offset和Time delay
PTP与BB相位差
下面我们将详细介绍这些测试内容。
1. PTP status
首先第一项是PTP status,这一项很简单,就是系统中的从属设备自我判断是否锁住了PTP,我们可以在示波器上直接进行检查。显示结果一般有以下三种情况,分别是locked,locking,unlock。
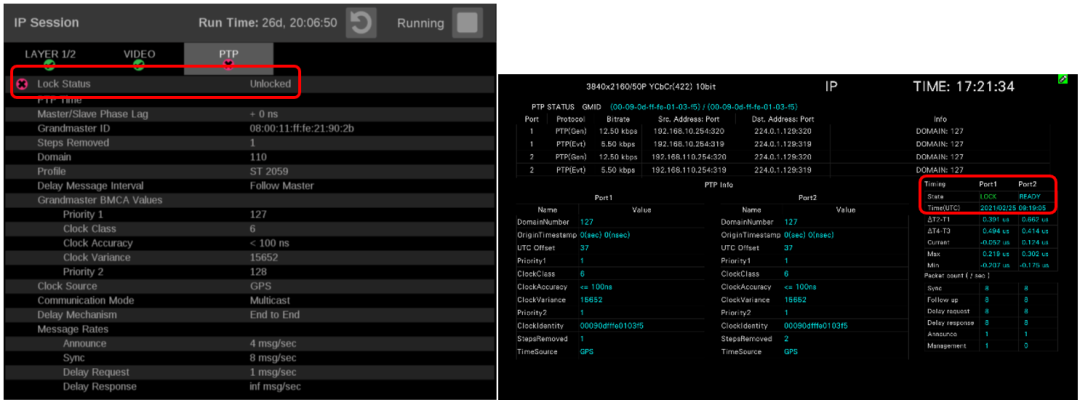
图34 示波器PTP状态截图
2. GMID or Grandmaster ID
GMID就是显示当前锁定的grandmaster的mac地址(中间插入ff:fe字节),我们可以直接通过GMID来判断当前设备锁定在系统中的哪个时钟上。当主备链路都锁定完成时,GMID会有两个地址,如果都锁定到一台同步机上,那么地址会相同。
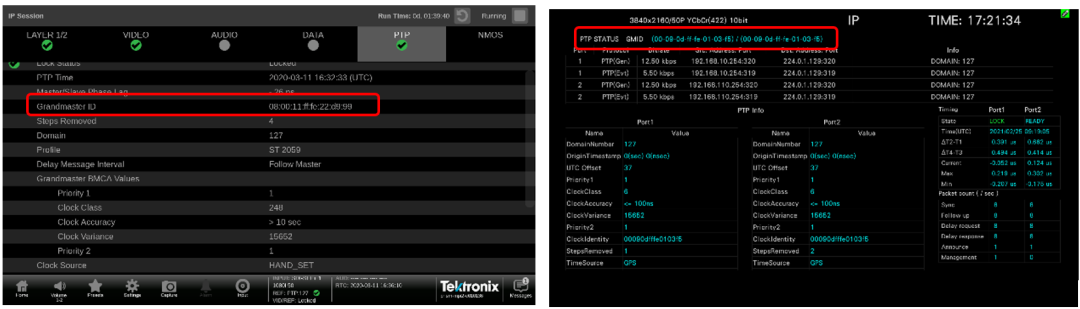
图35 示波器GMID截图
3. Domain
接着是domain的检查,这项值是在同步机以及交换机上设定的,通过读取数值,来判断从设备是否锁定在我们所设定的同步域中。我们在系统设计时就需要确认系统使用的domain,之后在同步机、交换机上做相应的设定,最后我们的测试设备在测量时读到的domain值与设定一致即为正确。索尼系统的domain值一般为127。
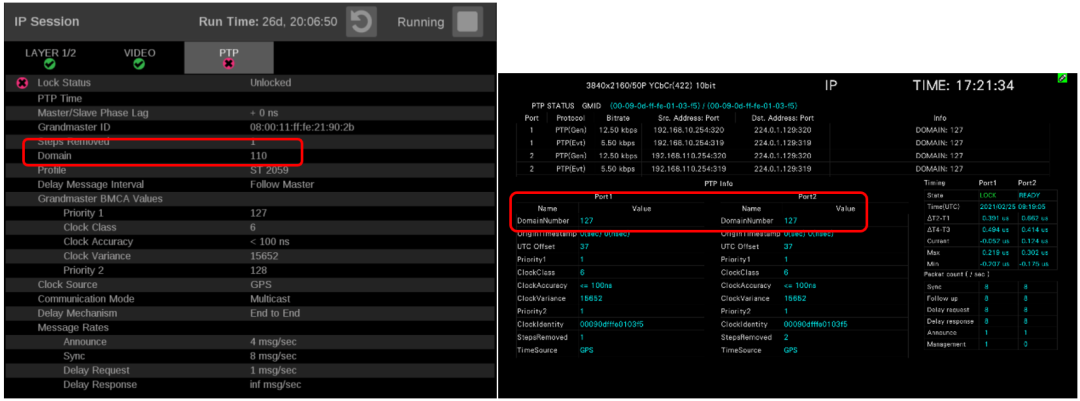
图36 示波器Domain截图
4. BMCA
接着是BMCA(最佳主时钟算法)的检测,BMCA本质虽然只是个算法,但是其需要借多项报文值来对优先级进行判断。我们经常需要检查的项有priority 1,clock class,以及priority 2这几项,这些值能够直观的反应目前锁定时钟的级别,以及系统锁定在哪台时钟上。
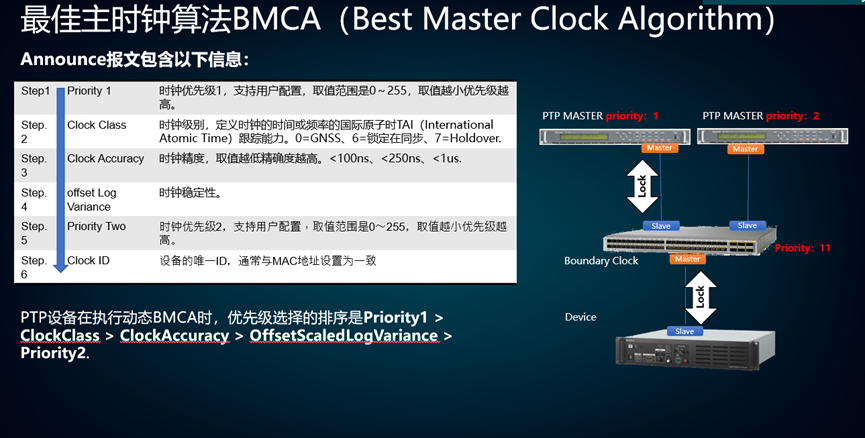
图37 BMCA算法
priority 1:时钟优先级1,支持用户配置,取值范围是0~255,取值越小优先级越高。
Clock Class:时钟级别,定义时钟的时间或频率的国际原子时TAI(International Atomic Time)跟踪能力。0=GNSS、6=锁定在同步、7=Holdover.
Clock Accuracy:时钟精度,取值越低精确度越高。<100ns、<250ns、<1us.
offset Log Variance:时钟稳定性,数值越小表示时钟约稳定。
Priority 2:时钟优先级2,支持用户配置,取值范围是0~255,取值越小优先级越高。
Clock ID:设备的唯一ID,通常与MAC地址设置一致
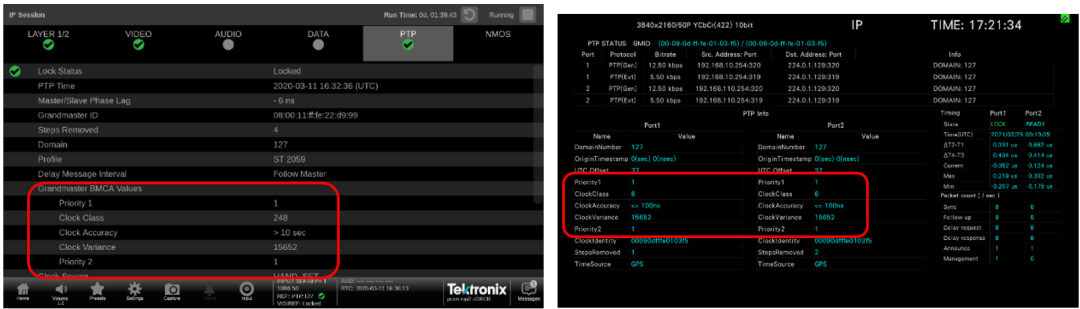
图38 示波器BMCA信息截图
5. Message rates和PTP Profile
下一个需要查看的指标是message rates,而message rates中的数值受到PTP Profile的影响,不同的Profile规定,有不同的数值,如下图显示,一般都是以每秒多少个报文来计数的。索尼IP Live系统中规定的报文速率可参考下图。
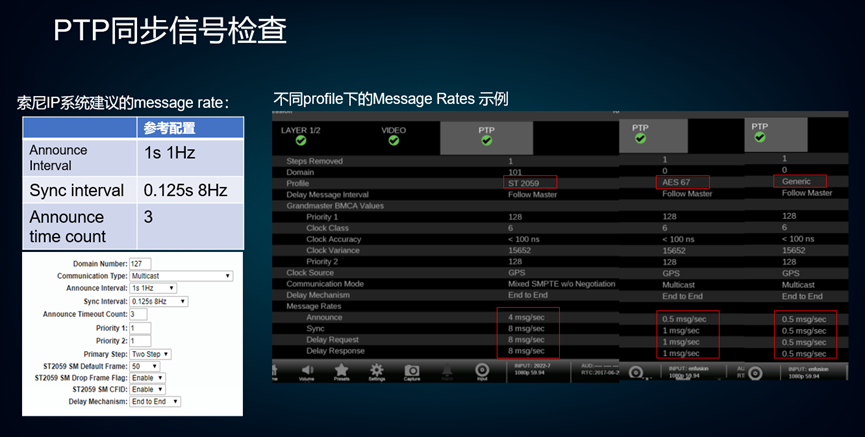
图39 索尼IP Live系统的message rates
有些Profile对于每秒中报文数量容忍范围较大,如果报文速率低于规定值,可能是网络中或主时钟存在问题。
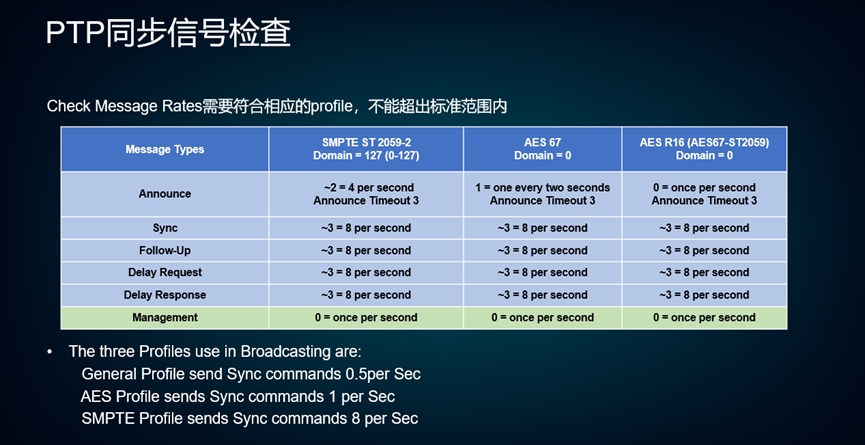
图40 不同profile的message rates
Message rate一般由6组报文来构成,分别是:
Announce:从主时钟收到的announce报文信息的速率,announce报文含有BMCA信息用来评估最佳时钟。一般是每秒1到4条信息。
Sync:显示从主时钟收到的同步信息(Sync)的速率。Sync报文用于测量从主站到从站的传播延迟,sync报文包含t1时间戳,当从设备收到sync报文后会标记t2,并计算延迟。
Follow-up:主设备发送完sync报文后,会发送一个带有t1信息的follow-up报文来给从时钟。
Delay Request:从设备发出的Delay Request报文,用来标记t3,主设备通过这个报文来计算出t4.
Delay Response:Delay Response是从主设备发出的,包含t4时间戳,从设备收到后计算t4-t3延迟量
Management:传输用于管理时钟设备的的信息以及命令,目前2110系统中的profile不发生management报文。
6. Time offset和Time delay
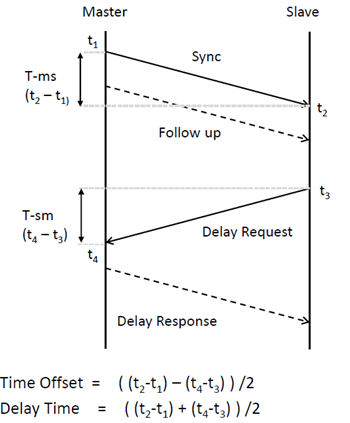
图41 Time offset和Delay time示意
Time offset用来修正主、从时钟的时间差,同时也可以判断从设备是否锁定PTP。ST2059-2标准规定:同一时刻任意两个slave device(从设备)的时间差在1us(即1000ns)之内时,则认为系统实现同步,示波器常用1us(即1000ns)作为offset最大绝对值,以判断示波器自身是否锁定上PTP。
可以看出标准描述的是整个系统的同步,但是在实际系统中无法直接测量同一时刻所有slave设备的offset,因此示波器常用1us(即1000ns)作为自身offset的最大绝对值,以判断示波器自己是否锁定上PTP。
如下图所示即为示波器检测PTP抖动。
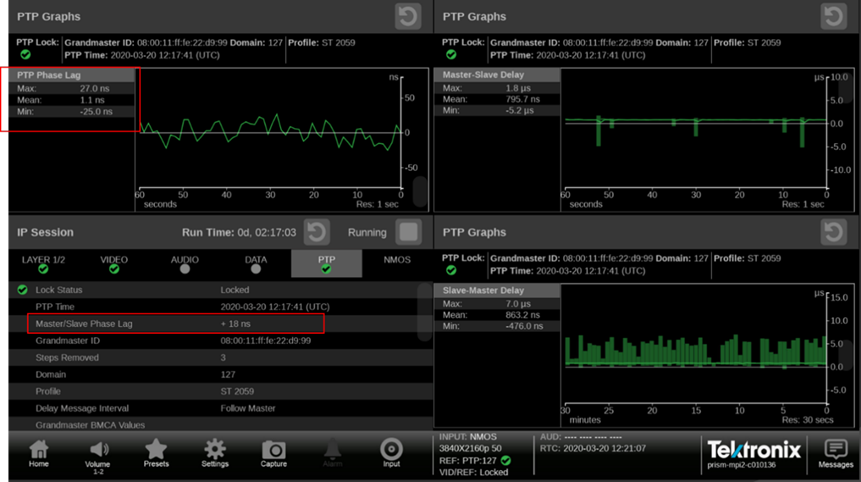
图42 Telestream示波器offset测量
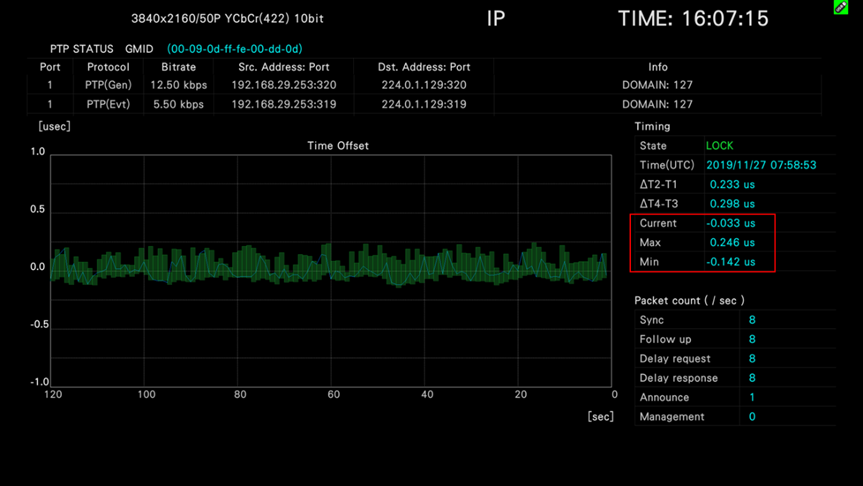
图43 Leader示波器offset测量
Time delay测量网络传输造成的延迟时间,根据计算出的offset值修正从时钟以矫正时间。Time delay没有标准的参考值,我们只能说delay值越小越好。
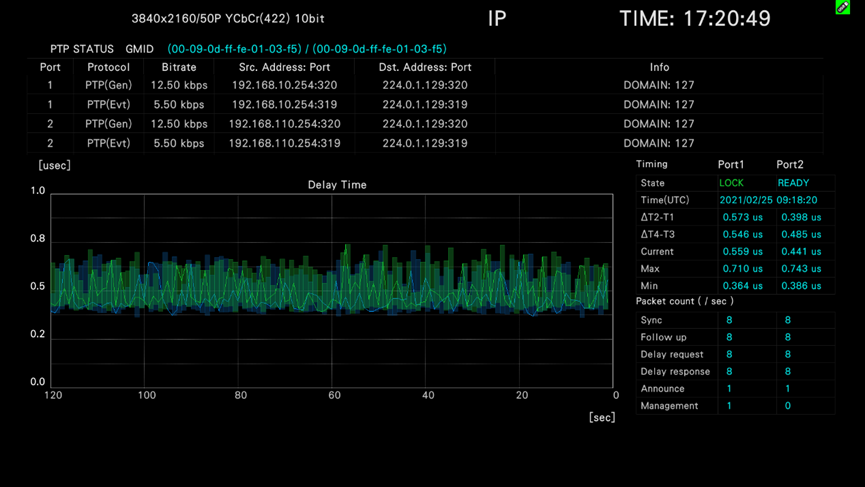
图44 Leader示波器Delay Time截图
7. PTP与BB的相位差
如之前所说,当前系统多为BB/PTP融合系统,虽然同一个同步机输出的BB与PTP能够保持相位一致,但由于BB信号是模拟信号,经过不同距离传输有可能导致相位发生变化,而此时系统中BB与PTP是否保持一致也变成了一个关键点。
那么二者的同步可以测量吗?可以!
Telestream/Leader的示波器均有测量BB/PTP相位差的功能,如下图所示即为示波器检测BB/PTP相位差。
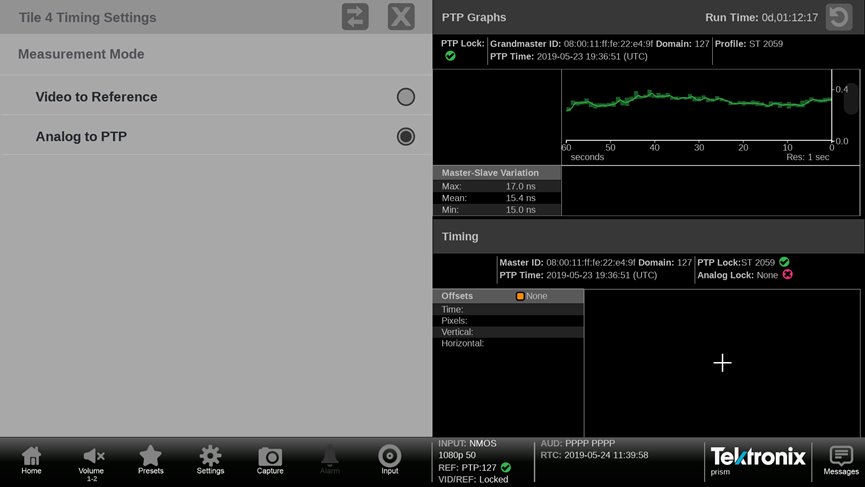
图45 Telestream示波器检测BB/PTP相位差
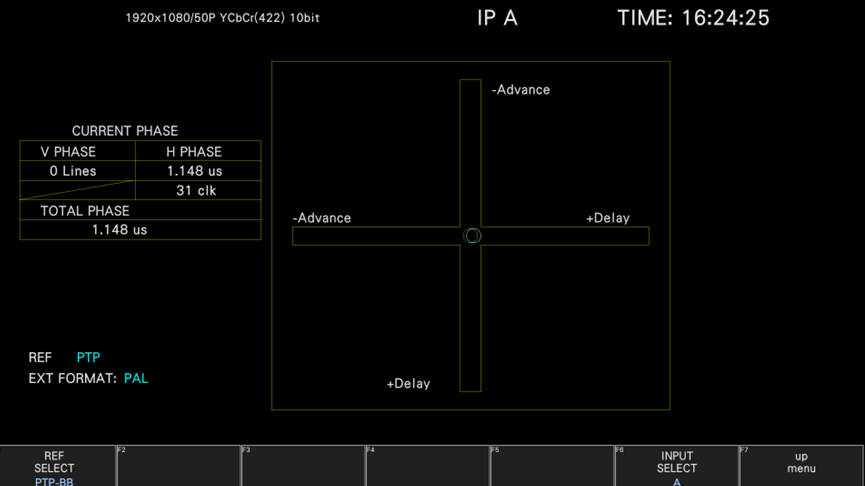
图46 Leader示波器检测BB/PTP相位差
一般认为BB的圆圈与PTP的十字重合为最佳同步状态。由于PTP相位无法调整,若出现不同步的情况需要调整BB的相位。
此外,对于PTP的检测不光可以使用示波器,还可以利用wireshark和PTP track hound等软件进行报文检测、交换机进行链路检测、设备检测等,多种手段的目的相同,都是确保系统中的PTP同步信息正确。
PTP同步系统检测方法
说了PTP的测量指标,下面我们来介绍系统性检查PTP同步的方法,尤其是在一个网络环境中,同步机的设定,交换机的设定,环接都会对最终测量到的PTP值产生影响。
系统性的PTP检测主要分为两种,一种是单机检测,即包括摄像机、切换台等从属设备,通过设备上PTP的相关菜单来测试设备是否正常锁定于PTP。另一种是综合检测,对系统当前的PTP同步情况进行检测,需要结合示波器、交换机、软件等,通过这些手段可以检测系统中的PTP状态是否有问题以及其稳定性。因此其检测思路可简单总结为如下图所示:
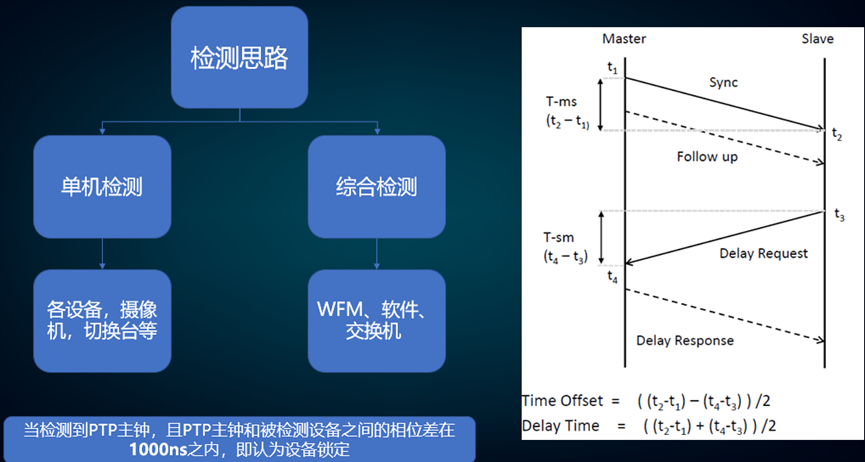
图47 PTP检测思路
最简单的判断结果就是,被检测的节点是锁定到当前系统的PTP主钟,且PTP主钟和被检测设备之间的相位差在1000ns之内,即认为设备锁定。同时,可以检查前面介绍的各个指标以确定设备锁定在系统中的哪个时钟上,优先级是否正确,PTP profile是否生效。
ST2110同步系统架构
现阶段的ST2110系统周边或备份系统还在使用基带的相关设备,且某些ST2110设备也还需要传统同步才可保证信号传输和处理,因此目前阶段的同步系统如下图所示:
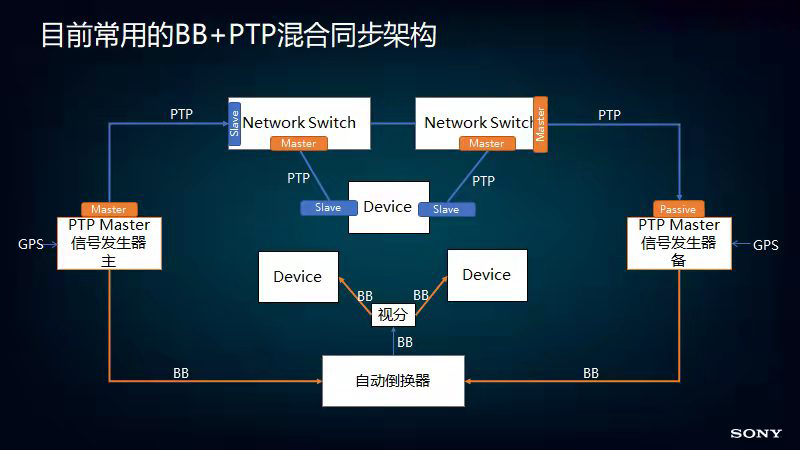
图48 BB与PTP融合架构
因此在系统检测时,除去PTP检测,还需要对融合架构进行检测,需要注意的一个是PTP和BB的相位差,十字重合为最好,确保应急切换时,IP链路和基带链路的相位一致,不会出现问题;还有一个是确保BB输出中含有VITC,这样保证即使基带源转换成IP信号后,帧还是对齐的。
不同系统架构的PTP应急检测
如前文架构图所示,同步系统是一个整体架构,系统设计时充分的考虑了:主备冗余、多链路的保护、主备同步机的同步,最终实现当出现单个故障时系统依旧保持稳定。
但是由于设置问题或系统部分故障未能发现,整个系统会发生抖动,造成严重后果,因此在系统测试阶段还需要对同步系统进行应急倒换测试。
情况一:主同步机断电
如下图,在单GPS系统中,将主同步机断电,进行系统倒换测试:
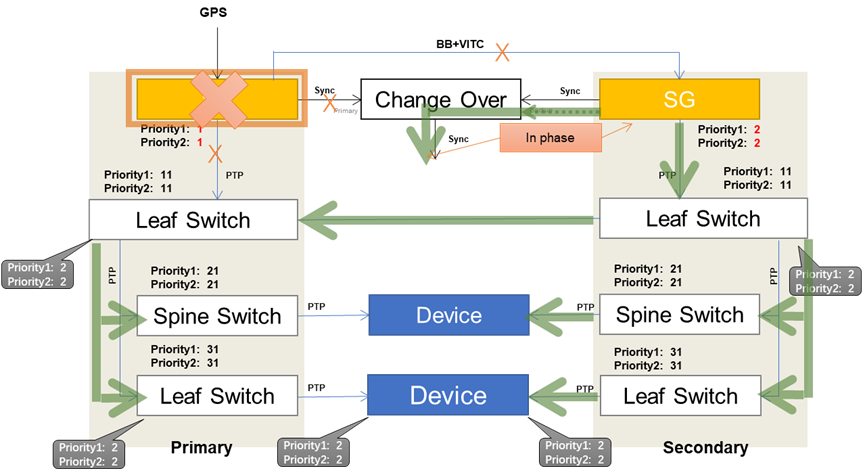
图49 测试主同步机断电应急倒换
测试结果应当是系统BB与PTP均倒换到备同步机,即device上PTP的优先级应为priority1:2,priority2:2,基带倒换器上应倒换为备路同步机BB输入,若出现其他情况需排查系统设置是否有问题。
情况二:丢失GPS
当测试外同步丢失的情况时,由于只是同步主机外同步丢失,同步机会自动进入到stay in genlock或stay in sync的保护模式,同步机保持晶振直到重新锁定GPS。在stay in genlock的模式下,由于产生优先级的设备未在系统中离线,系统会保持锁定在主同步机上,device上依旧显示priority1:1,priority2:1,但是在示波器上可以看到时钟源已经转移到同步机上了。
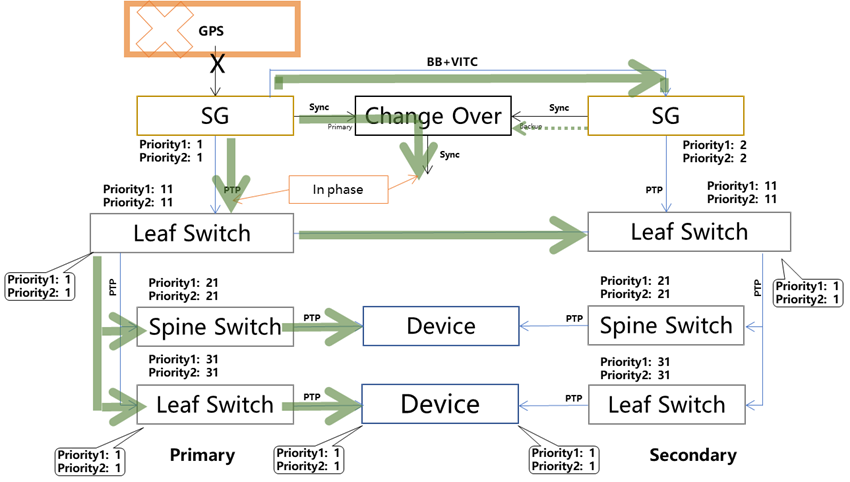
图50 测试GPS丢失情况的应急倒换
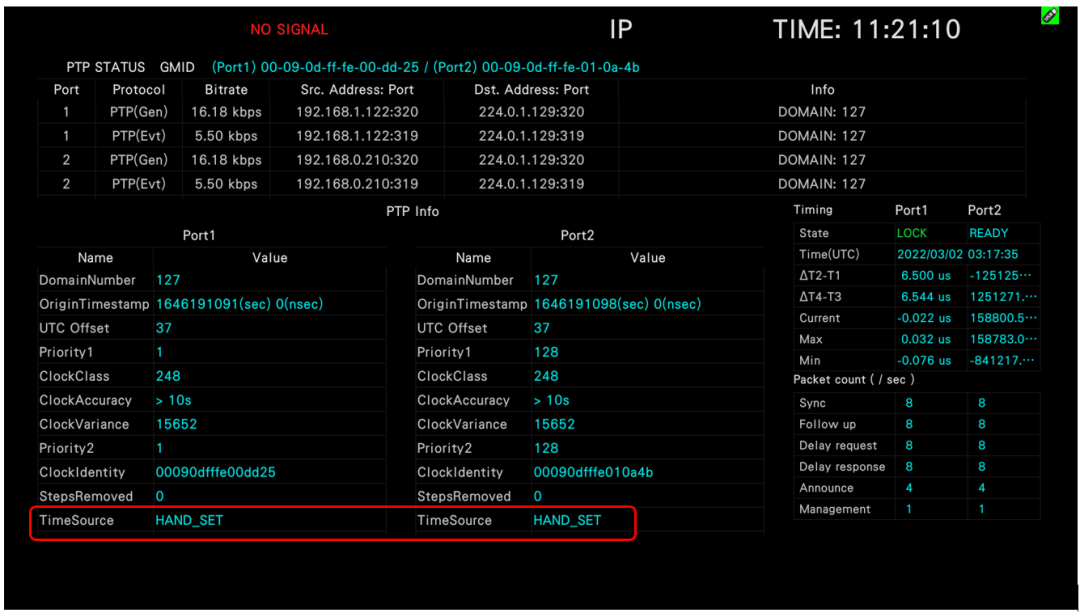
图51 系统自动切换到同步机发生PTP
情况三:PTP上联交换机断电
此外,还有交换机断电的情况,当同步机上联的交换机意外断电,主路PTP丢失,系统根据优先级会自动锁定到备同步机PTP上,device上显示priority1:2,priority2:2,此时需要注意的是虽然PTP倒换到备同步机上,但是BB依旧锁定在主同步机,不过由于主备是互锁的,备路的BB信号与主路相位处于统一水平,不必担心BB信号会对应急切换产生影响。
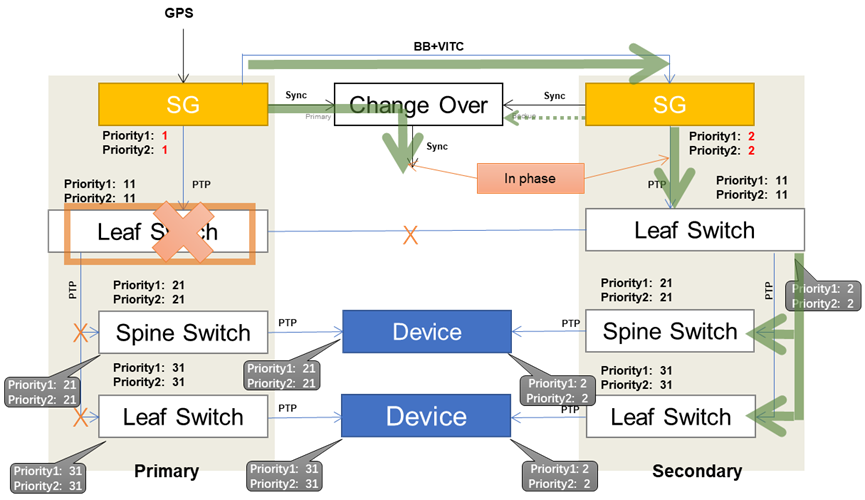
图52 测试PTP上联交换机断电应急情况
情况四:PTP心跳线断开
最后一种情况是主备交换机的心跳线断开,这种情况下由于备路交换机锁定到最高优先级的时钟是备同步机,如图所示,这种情况下,主链路锁定主时钟,备系统锁定备时钟。系统设备的输出也不会发生抖动。
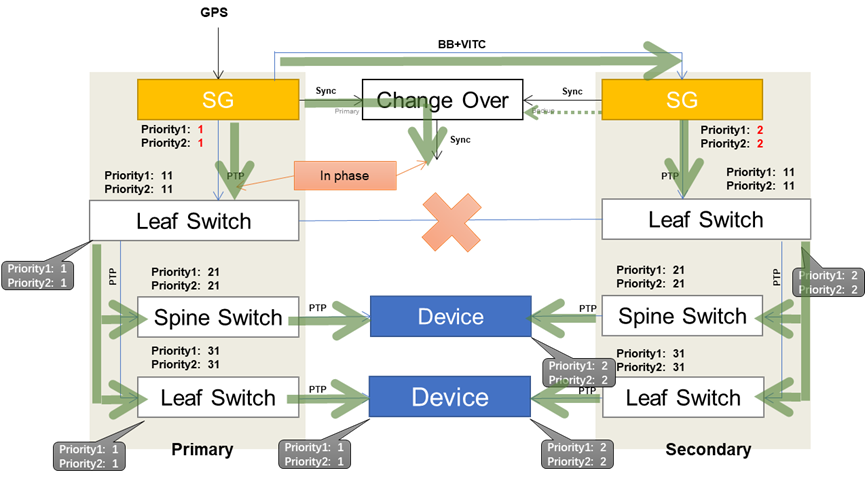
图53 测试主备系统PTP心跳线断开应急情况
以上我们都是讨论单GPS的系统,由于备同步机锁定主同步机,应急情况也相对简单。但是当系统中主备同步机各自锁定GPS时,倒换情况会更加复杂一些,篇幅有限,以后有机会再详细讨论。我们只要记住系统一定会根据BMCA算法计算出当前系统中的最佳时钟并锁定,就可以了。
本期主要介绍了PTP的测量指标,以及系统性检查同步系统的情况,希望对大家有所帮助,真气犹在,必当尽力而为。下期我们将介绍数据流特性的检测,包含2110-10的一部分内容,以及2110-20,-30,-40标准。
原文标题:IP测量探索(四)——PTP同步测量
文章出处:【微信公众号:索尼中国专业】欢迎添加关注!文章转载请注明出处。
审核编辑:汤梓红
-
示波器
+关注
关注
113文章
7129浏览量
196890 -
IP
+关注
关注
5文章
1885浏览量
156807 -
测量
+关注
关注
10文章
5732浏览量
117004
原文标题:IP测量探索(四)——PTP同步测量
文章出处:【微信号:Sonystudio,微信公众号:索尼中国专业】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
如何实现PTP协议的精准同步时钟?





评论