 多传感器融合技术的应用方案
多传感器融合技术的应用方案
“INDEMIND:随着机器人的应用领域不断拓展,对机器人的环境感知能力的要求也在不断提升,而要解决环境感知问题,传感器技术则是最重要的应用支撑技术之一,它对于机器人的意义亦如人眼对于人,但与人眼不同的是,它的构成主要由传感器和算法组成,并伴随着机器人发展,已从单传感器向多传感器融合迭代。”
由于机器人不断渗透到各行各业,面对的外部环境越来越复杂,对机器人的精度、稳定性、智能化提出了新的要求,而单传感器或采用多个(种)传感器却仅是从多个侧面孤立地获取目标信息的方式,前者不仅效率较低下,且获取的信息量有限,而后者不断增加传感器的做法,更会增加系统的复杂度,对平台算力要求提高,且割断了各传感器信息间的内在联系,丢失了信息经有机组合后可能蕴含的深层有效信息,造成信息资源浪费,甚至可能导致决策失误。
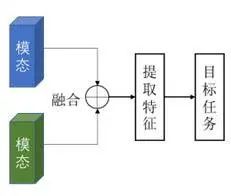
在多重因素影响下,发展多传感器融合技术便表现出了它的必然性。事实上,多传感器融合技术从字面上可知并非另辟蹊径,而是在采用多个(种)传感器的基础上,进一步开拓和完善而来,原理是借助算法对感知相关要素信息的冗余或互补信息进行分析、建模、解算、融合、估计和补偿,最终输出更为准确、丰富、可靠的信息。
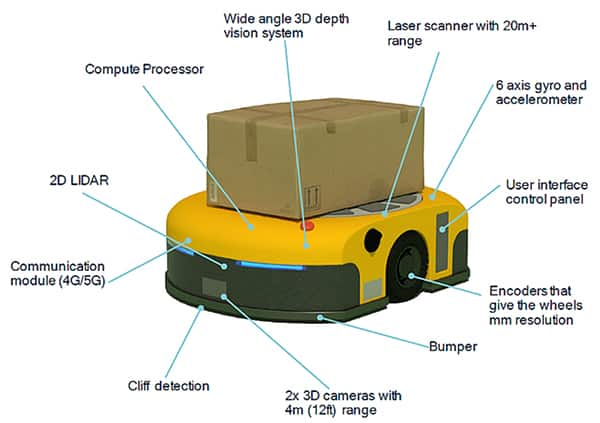
多传感器融合技术的应用,对于系统的容错能力、信息精度、信息的可信度&丰富度都有了明显提升,这对于机器人的意义无比重要。目前,市面上多传感器融合技术多是以激光雷达为主导的技术方案,并根据架构组成,又主要分为两种。
一种是以单线激光雷达主导+IMU+里程计或其它传感器的融合方案,采用松/紧耦合方式,有着简单、成熟的技术优势,是市面上较为常见的融合技术方案,然而这类方案的缺点在于,一是环境适应能力较差,对于环境特征单一的长走廊等场景,误差较高,容易偏离路径,二是重定位能力差,运行过程中一旦丢失位置,难以重新定位。
另一种是以多线激光雷达为主导的融合方案,与其它传感器采用松/紧耦合方式组合,得益于多线激光雷达,可获取到环境物体的三维信息,使得这类方案的环境感知能力得到显著提升,且在功能表现上,同样有着激光雷达精度高和稳定性高的特点,然而需要提到的是,多线激光雷达在保留了传统优势的同时,也有着激光雷达类似的局限性,且一旦出现故障,会导致整个系统宕机,目前这类方案主要应用于大多数商用机器人,不过其高昂的成本也让大多数企业难以承受。
因此,在此背景下,行业一方面在进一步完善激光雷达方案的同时,另一方面也在探索视觉方案。目前,以视觉为主导的融合技术方案,在市面上虽然还相对较少,但随着计算机视觉技术多年来的发展,已经有了成熟方案,INDEMIND的多传感器融合技术便是其中之一。
与激光雷达方案不同,INDEMIND多传感器融合技术在实现上,设计了以视觉传感器为主导的标准化、模块化的多传感器融合架构,通过遵循INDEMIND的标准定义接口,可快速加入IMU、里程计、激光、GNSS等多种传感器,实现“积木式”加装,结合双目立体视觉技术,能够实现高精度、高稳定性、低成本的3D环境感知,走出了不同于激光雷达方案的All IN ONE新路径。
众多周知,信息量丰富是视觉的优势,但也导致对算力要求的大幅提升。由于需要处理的环境信息量巨大,对于平台的算力要求极高,同时视觉受环境光线影响严重,如何解决这些难题,是走通视觉方案的关键。
因此,INDEMIND在研发过程中,对它们进行了长期针对性解决。
• 降低算力要求
算法&硬件优化:采用增量优化的方式,分段处理,并在区段间建立先验信息,有效降低了平台计算压力,提高计算效率。
硬件加速:在硬件上,对于视觉处理采用neon加速、GPU加速、DSP加速等方式,提升计算性能,降低算力要求。
• 提高性能
传感器更丰富:基于INDEMIND多传感器融合架构,可融合超过4种以上的传感器,通过紧耦合方式组合,对于环境的容忍度更高,能够保障在部分传感器出现异常的同时,系统仍能保持正常运行,提高鲁棒性。
误差补偿:为了提升精度,INDEMIND对系统中的视觉、IMU、里程计等每个传感器都进行了实时误差建模、估计及补偿,能够有效保障在实时运行过程中的精度和稳定性。
野值判定与剔除:由于传感器较多,视觉、激光、里程计、IMU等不同传感器产生的噪点,对于系统的稳定性和精度影响较大,因此,INDEMIND对于各个传感器的数据,进行了野值判定及剔除,进一步增进系统对于原始传感器数据的容错能力,提升最终的稳定性和精度。
与此同时,基于INDEMIND立体视觉技术,可获取丰富的3D环境信息,配合上层决策,对于实现智能避障、路径规划、人机交互提供了必要的前提条件。
目前,经过长期验证,搭载INDEMIND多传感器融合技术的测试机器人,定位精度可达厘米级,<5cm(RMS),达到激光融合方案的同等精度水平。在智能避障方面,能够实现三维立体避障,精度<1%,结合INDEMIND智能决策引擎技术,可实现策略化避障,提升安全决策水平。同时,在交互方面,基于智能决策引擎技术,能够根据指令实现目标跟踪、指定区域作业等多种个性化功能,提升机器人人机、物机交互能力。
审核编辑:汤梓红
-
传感器
+关注
关注
2550文章
51035浏览量
753078 -
测试
+关注
关注
8文章
5269浏览量
126599 -
机器人
+关注
关注
211文章
28380浏览量
206918
发布评论请先 登录
相关推荐
雨量水位数据采集终端机RTU:多传感器融合,水文监测数据远程查看
多传感器融合在自动驾驶中的应用趋势探究

蓝牙数据模块多连接方案让传感器更加智能

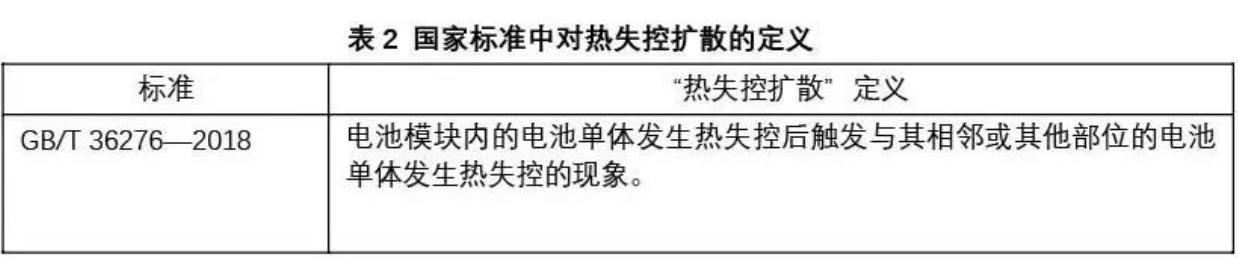
基于多物理参数数据融合和先进人工智能算法的锂电池热失控监测传感器
多感科技携自研的光学传感器芯片及产品亮相深圳传感器展览会
智慧灯杆多合一传感器(创新设计,实现多功能融合)
多区飞行时间(ToF)传感器的特点

深度解析:多传感器融合SLAM技术全景剖析

多镜头多传感器图像视频处理器应用

康谋技术 | 自动驾驶多传感器数据融合方法





 工商网监
工商网监
评论