 时间敏感网络 (TSN):为自动驾驶铺平道路
时间敏感网络 (TSN):为自动驾驶铺平道路
在接下来的几年里,向自动驾驶(自动驾驶)车辆的过渡将深刻地改变社会。它将重塑我们的物理环境,让世界恢复数百万小时的空闲时间并拯救生命。
与人工驾驶车辆相比,自动驾驶车辆的安全性、可靠性和性能标准更高。尽管当今的车辆包含大量处理器、传感器和其他半导体组件,但对高带宽切换的需求以及更严格的可靠性和同步要求的引入正在推动对车载网络 (IVN) 的全面重新设计。为了全面满足这些新要求,现代自动驾驶 IVN 架构正在过渡到 IEEE 时间敏感网络 (TSN) 标准集。这篇博客文章探讨了 TSN 以太网,特别是 IEEE 802.1CB 帧复制和消除 (FRER),如何提高 IVN 冗余和可靠性。
自动驾驶的诞生
尽管自动驾驶实验可以追溯到 1920 年代,但 DARPA 的“大挑战”竞赛在新千年的第一个十年举行,并为任何能够创造出自动驾驶汽车的机器人工程师团队提供 100 万美元的奖金。完成专门设计的课程,标志着现代自动驾驶时代的开始。尽管没有车辆在 2004 年完成莫哈韦沙漠 150 英里的路线,但在随后的比赛中引入激光雷达技术提供了成功的关键,多个团队在极短的时间内完成了该路线。自动驾驶能力的快速发展让业界有信心推出自动驾驶汽车的大众市场应用。
汽车IVN架构
在自动驾驶汽车中,构建“感知”网络以用各种传感器(相机、激光雷达、雷达、超声波等,由图 1 中的蓝色和绿色元素表示)代替人类驾驶员,并与计算综合体互连(由图 1 中的红色元素表示)。

图 1 - 自动驾驶感知网络
Compute Complex 接收所有相关的传感器数据,然后将其融合在一起以决定车辆应该做什么,即转弯、制动、加速、滑行、信号。然后通过执行网络发送决策,该网络通过现有的汽车总线网络连接到车辆的各种动力传动系统电子控制单元 (ECU)。
自动驾驶趋势
自动驾驶IVN设计的主要架构趋势是:
- 从基于域的架构到基于区域的架构的转变推动了对高速 IVN 骨干网的需求,以互连区域以太网交换机和计算综合体。
- 越来越多的连接传感器、端点、相机和计算元件极大地增加了 IVN 带宽。
- 采用 4K 和 8K 以太网摄像机转移到以太网进一步加速了 IVN 带宽的增长。
- 越来越多的传感器数据以原始形式在网络中传输,而不是以重新处理的格式,这也增加了 IVN 带宽。
汽车IVN的演变
有几种汽车总线技术已被广泛使用,包括 LIN、Can CAN-FD、FlexRay 和 MOST,但这些技术陈旧、专有、带宽低且缺乏许多所需功能。
一套基于以太网的强大 IEEE 标准已成为现代自动驾驶感知网络的主要网络技术。根据 Kirsten Matheus 博士在 2019 年汽车以太网大会上的讲话,该平台提供了一套完整的解决方案:
- 可扩展的数据速率,从 10Mb/s –100Gb/s
- 拓扑灵活性
- 广播、多播和点对点流量的共存
- 明确寻址
- 支持多种 QoS 方法
- 强大的安全性
- 基于服务的通信
- 统一网络(即无网关通信)
时间敏感网络:现代 IVN 的基础
在传统以太网中,有多种网络冗余解决方案,包括生成树 (IEEE 802.1D)、快速生成树 (IEEE 802.1w) 和以太网环保护交换 (ITU G.8032)。然而,这些解决方案受到相当长的故障转移时间的限制,其范围从 50 毫秒到几秒不等。在车辆应用中,这种性能水平是不可接受的。例如,以 60 mph 的速度行驶的汽车每秒行驶 88 英尺,反应延迟为 50 毫秒,对应于 4.4 英尺的行驶距离。这可能是生与死的区别。
自动驾驶是一项关键功能,传统的网络冗余解决方案不足以满足安全要求。IEEE 时间敏感网络 (TSN) 标准正在解决这个问题,该标准为通过确定性以太网网络对时间敏感的数据传输提供了一组机制。这些标准包括:
- IEEE 802.1Qav - 时间敏感流的转发和排队增强
- IEEE 802.1Qat - 流预留协议
- IEEE 802.1Qcc - SRP 的增强
- IEEE 802.1Qch - 循环排队和转发
- IEEE 802.1Qci - 每流过滤和监管
- IEEE 802.1Qbv - 时间感知调度 (TAS)
- IEEE 802.1Qbu - 帧抢占
- IEEE 802.1Qcr - 异步流量整形
- IEEE 802.1Qca - 路径控制和预留
- IEEE 802.1CB - 帧复制和消除可靠性
- IEEE 802.1CB – 帧复制和消除以提高可靠性
对自动驾驶平台特别重要的是帧复制和消除机制,通常称为无缝冗余 (SR)。该功能可确保在网络出现单一故障时零丢包,例如节点故障、链路故障、链路错误或因网络拥塞而丢包。基本操作概念如下:
- 每个数据包都被复制并在两条不相交的路径上向目标节点传输;
- 重复的数据包具有相同的序列号(SN),编码在数据包头中的 SR-Tag 中;
- 在目标节点,目标节点接收到的第一个重复数据包(由 SN 标识)被接受,并且在接收时丢弃重复数据包。
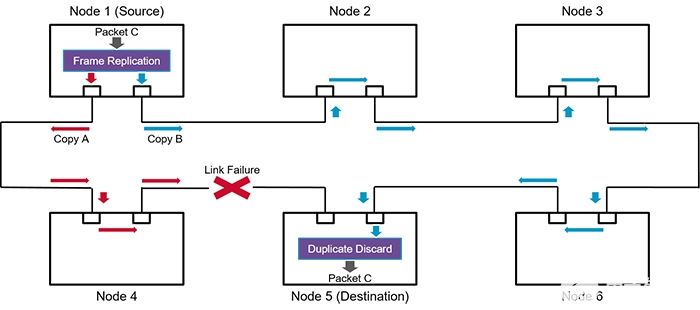
图 2 - IEEE 802.1CB 零故障转移时间网络冗余
如图 2 所示,通过帧复制和消除,目标节点不会意识到路径故障,也不会对服务造成影响,无论是丢失数据包的形式,还是由于网络故障转移导致的瞬时数据包流中断。
超越一步
正如引言中所讨论的,自动驾驶汽车的标准将高于人类驾驶员。传统的以太网冗余技术,原本开发的企业组网环境,无法使用;单调驾驶的可靠性要求要求零故障转移时间解决方案对于车辆的安全运行是必不可少的。支持 IEEE 802.1CB 的 IVN 现在已成为赌注,以确保自动驾驶能够实现更安全、更高效的交通任务。
Broadcom 将自动驾驶视为以深刻而积极的方式塑造 21 世纪生活的机会,并致力于提供支持技术的关键部分。2016 年,Broadcom 推出了世界上第一个 TSN 以太网交换机 Quartz,该交换机现已被设计到全球许多关键的汽车自动驾驶设计中。凭借在硬件中实现的关键 IEEE 802.1CB 功能,Quartz 可以以高达 25Gb/s 的线路速率运行,从而将 TSN 性能扩展到远远超过基于软件或 FPGA 的解决方案。2020 年,Broadcom 进一步扩展了其 TSN 创新,推出了 Quartz 系列的下一个成员——Quartz2。这款新设备增加了对 100 Gb/s 的支持,包括一个集中的线速 MACsec 加密/解密引擎,并显着降低了功耗。这些新的创新解决了汽车自动驾驶市场的关键要求。下表总结了 Quartz 和 Quartz2 的特性集:
| 设备 | 100M | 1G | 2.5G | 10G | 25G | 100克 | 802.1CB | MACSec |
|---|---|---|---|---|---|---|---|---|
| 石英 |
✔ |
✔ |
✔ |
✔ |
✔ |
✔(硬件) |
||
| 石英2 |
✔ |
✔ |
✔ |
✔ |
✔ |
✔ |
✔(硬件) |
✔(硬件) |
表:Broadcom 用于汽车应用的 TSN 以太网交换机汇总
审核编辑:符乾江
-
智能汽车
+关注
关注
30文章
2771浏览量
107123 -
自动驾驶
+关注
关注
783文章
13674浏览量
166103 -
TSN
+关注
关注
3文章
238浏览量
16805
发布评论请先 登录
相关推荐
喜讯!迈威通信TSN产品通过“时间敏感网络(TSN)产业链名录计划”评测,各项指标名列前茅



什么是时间敏感网络?TSN技术在汽车领域的优势
FPGA在自动驾驶领域有哪些优势?
FPGA在自动驾驶领域有哪些应用?


未来已来,多传感器融合感知是自动驾驶破局的关键
自动驾驶已成现实?赛思时间同步服务器赋能北京市高级别自动驾驶示范区,为自动驾驶提供中国方案








 工商网监
工商网监
评论