 S7 200 SMART之间TCP协议通讯的实现
S7 200 SMART之间TCP协议通讯的实现
TCP协议通讯
TCP是一个因特网核心协议。在通过以太网通信的主机上运行的应用程序之间,TCP 提供了可靠、有序并能够进行错误校验的消息发送功能。TCP 能保证接收和发送的所有字节内容和顺序完全相同。TCP 协议在主动设备(发起连接的设备)和被动设备(接受连接的设备)之间创建连接。一旦连接建立,任一方均可发起数据传送。
TCP协议是一种"流"协议。这意味着消息中不存在结束标志。所有接收到的消息均被认为是数据流的一部分。
S7 200 SMART与之间的TCP通讯可以通过两边调用OUC(开放式用户通讯)指令库中的TCP_CONNECT、TCP_SEND、TCP_RECV、DISCONNECT指令来实现。
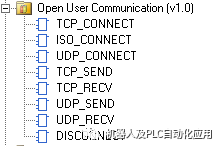
图1.开放式用户通讯库
开放式用户通信库需要使用 50 个字节的 V 存储器。
开放式的用户通讯连接资源包括8个主动连接和8个被动连接。
只可从主程序或中断例程中调用库函数,但不可同时从这两个程序中调用。
所需条件:
1、软件版本:STEP 7-Micro/WIN SMART V2.2
2、SMART CPU固件版本:V2.2
3、通讯硬件:TP电缆(以太网电缆)
所完成的通讯任务:
将作为客户端的PLC(IP地址为192.168.0.101)中VB0-VB3的数据传送到作为服务器端的PLC(IP地址为192.168.0.102)的VB2000-VB2003中。
S7-200 SMART 客户端编程
1、设置本机IP地址
在客户端设置IP地址为192.168.0.101
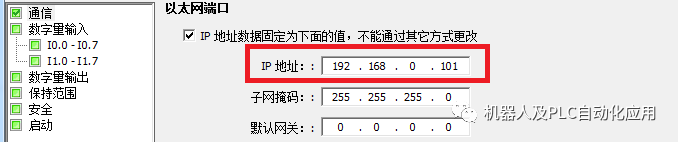
图2.设置IP地址
2、建立TCP连接
调用TCP_CONNECT指令建立TCP连接。设置连接伙伴地址为192.168.0.102,远端端口为2001,本地端口为5000,连接标识ID为1。利用SM0.0使能Active,设置为主动连接。
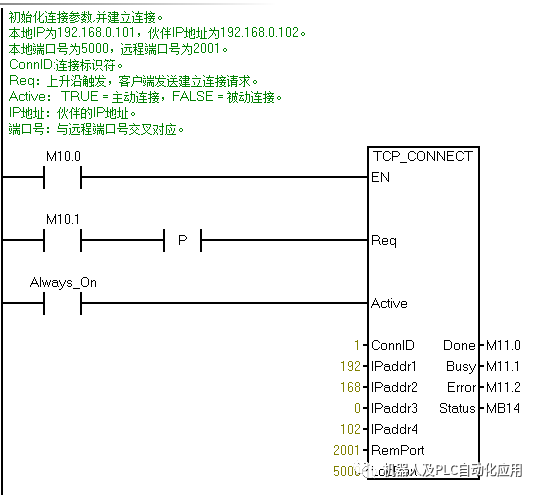
图3.调用TCP_CONNECT指令
指令的参数
输入参数:
EN :使能输入
Req:沿触发
Active :TURE=主动连接(客户端)
FALSE=被动连接(服务器)
ConnID:连接ID为连接标识符,可能范围为0-65534。
IPaddr1 ... IPaddr4:IP 地址的四个八位字节。IPaddr1 是 IP 地址的最高有效字节,IPaddr4 是 IP 地址的最低有效字节。
RemPort:远程设备上的端口号。远程端口号范围为 1 到 49151。对于被动连接,可使用零。
LocPort :本地设备端口号。范围为1-49151,但是存在一些限制。
本地端口号的规则如下:
有效端口号范围为 1 到 49151。
不能使用端口号 20、21、25、80、102、135、161、162、443以及34962至34964。这些端口具有特定用途。
建议采用的端口号范围为 2000 到 5000。
对于被动连接,本地端口号必须唯一(不重复)。
输出参数:
Done:当连接操作完成且没有错误时,指令置位 Done 输出。
Busy:当连接操作正在进行时,指令置位 Busy 输出。
Error:当连接操作完成但发生错误时,指令置位 Error 输出。
Status:如果指令置位 Error 输出,Status 输出会显示错误代码。具体错误代码对应详见手册。如果指令置位 Busy 或 Done 输出,Status 为零(无错误)。
3、调用发送数据指令TCP_SEND
调用TCP_SEND指令发送以VB0为起始,数据长度为DataLen长度的数据发送到连接ID为1指定的远程设备。
利用1HZ的时钟上升沿触发发送请求。
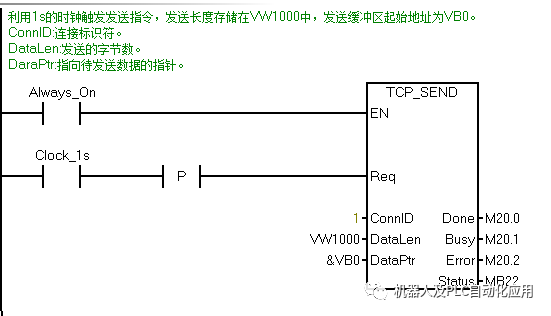
图4.调用TCP_SEND指令
指令的参数
输入参数:
EN :使能输入
Req:沿触发
ConnID:连接 ID (ConnID) 是此发送操作的连接ID号。
DataLen :DataLen 是要发送的字节数(1 到 1024)。
DataPtr:DataPtr 是指向待发送数据的指针。
输出参数:
Done:当连接操作完成且没有错误时,指令置位 Done 输出。
Busy:当连接操作正在进行时,指令置位 Busy 输出。
Error:当连接操作完成但发生错误时,指令置位 Error 输出。
Status:如果指令置位 Error 输出,Status 输出会显示错误代码。具体错误代码对应详见手册。如果指令置位 Busy 或 Done 输出,Status 为零(无错误)。
4、终止通讯连接
用户可通过DISCONNECT指令终止指定ID的连接。
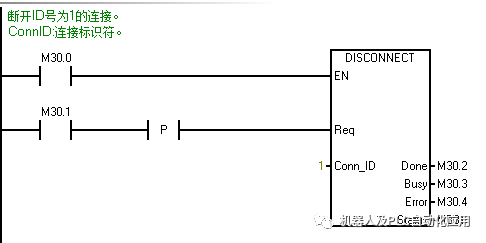
图5.调用DISCONNECT指令
参数说明:
输入参数:
EN :使能
Req:沿触发指令。
输出参数:
Done:当连接操作完成且没有错误时,指令置位 Done 输出。
Busy:当连接操作正在进行时,指令置位 Busy 输出。
Error:当连接操作完成但发生错误时,指令置位 Error 输出。
Status:如果指令置位 Error 输出,Status 输出会显示错误代码。具体错误代码对应详见手册。如果指令置位 Busy 或 Done 输出,Status 为零(无错误)。
5、分配库存储区
开放式用户通信库需要使用 50 个字节的 V 存储器,用户需手动分配 。在指令树的程序中,以鼠标右键单击程序块,在弹出的快捷菜单中选择库存储器。如图所示:
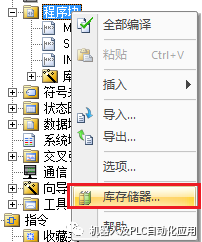
图6.库存储器
在弹出的选项卡中设置库指令数据区:
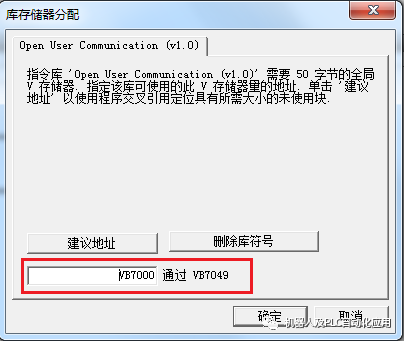
图7.分配地址
S7-200 SMART 服务器端编程
1、设置本机IP地址
设置IP地址为192.168.0.102
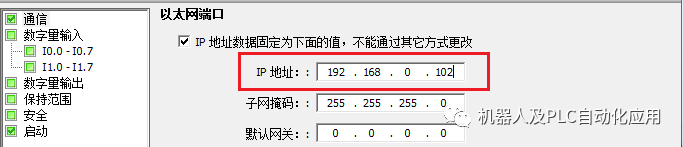
图8.设置本机IP地址
2、建立TCP连接
调用TCP_CONNECT指令建立TCP连接。设置连接伙伴地址为192.168.0.101,远端端口为5000,本地端口为2001,连接标识ID为1。利用SM0.0常闭点使能Active,设置为被动连接。
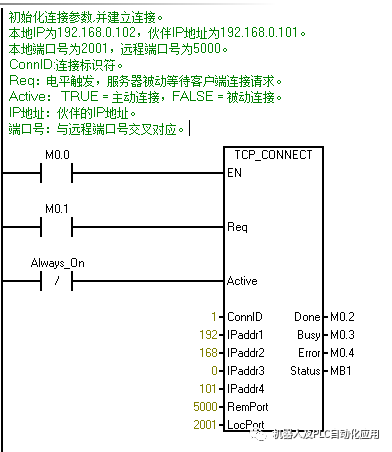
图9.调用TCP_CONNECT指令
3、接收数据
调用TCP_RECV指令接收指定ID连接的的数据。接收的缓冲区长度为MaxLen,数据接收缓冲区以VB2000为起始。
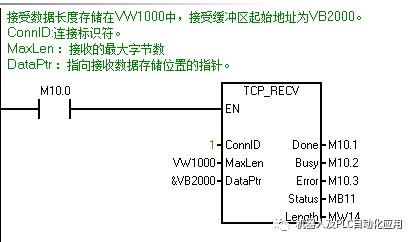
图11.调用TCP_RECV指令
监控结果
其中客户端的VW1000是发送的数据长度,服务器端的vw1000是接收的数据长度。

图12.监控结果
审核编辑:郭婷
-
以太网
+关注
关注
40文章
5423浏览量
171672 -
TCP
+关注
关注
8文章
1353浏览量
79068
原文标题:S7-200 SMART之间TCP通信例程
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
西门子1200、200smart、LOGO实现S7通讯演示

教程-西门子S7协议转换为HTTP协议

如何利用无线MODBUS通讯模块实现无线485通信?

EG网关采集西门子S7-200smart转Modbus协议

S7协议读取西门子S7-200 Smart PLC数据

西门子S7协议与TCP协议的区别
华为智界S7汽车今日开启海量交付
西门子S7-200 Smart PLC加密设置全面指南

组态软件与西门子S7系列PLC及三菱PLC间的无线通信测试
西门子S7-200 SMART的通信端口解析
两台西门子s7-200smart plc如何通过互联网远程通讯?

S7-1500与多台200SMART之间无线以太网通讯搭建方法

如何在S7-200 SMART CPU断电重启后保持运动控制的当前位置值?






 工商网监
工商网监
评论