 简单的PID控制算法及其改进
简单的PID控制算法及其改进
不管在电工实际使用,还是电气科研入门。对于某个系统过程的控制是不可避免的,特别是人工智能兴起的今天,电气作为工科领域的老大哥,也是与时俱进的,现在我们来了解一下几种简单传统的控制算法及其改进。
PID控制算法:
PID控制算法在工业微机中已经应用的比较广泛,控制结构简单,参数易于调整,一般是根据经验进行在线对参数整定。
PID控制算法的控制规律:

其中U(t)代表的PID控制的输出,e(t)代表的输入信号,Kp代表的是比例系数,Ti代表的是积分控制,Td代表的是微分控制。
如果将它建立成模型控制系统:
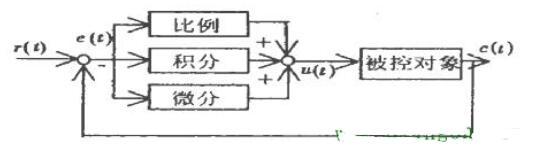
比例环节:即系统的偏差信号e(t)会产生成比例的控制作用来减少偏差。缺点是加大了比列系数会使系统的稳定性变差。
积分环节:积分控制主要是用于消除稳态误差,提高系统的无差度,但是积分常数越大反而积分作用越弱。缺点是它可能会使系统频带变窄。
微分环节:作用是具有预见性,能反应偏差信号的变化率,能提前知道变化趋势。加快系统响应速度,减少超调,减少调节时间。
以上可以进行三种组合控制即:PI,PD和PID三种。
改进的第一种位置式PID控制:
就是将上面提到的PID控制离散,也就是将一个连续的输入变成无数个断点

离散化之后可以对工业情况中某次特殊情况单独进行分析,只对它偏差值进行点控。
改进的第二种增量式PID算法模型
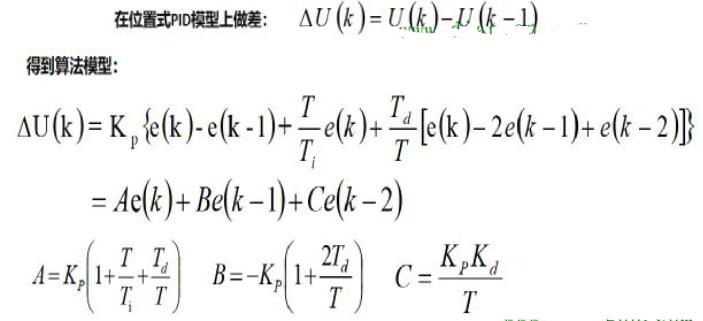
因为位置式PID控制算法中,每次的输出与控制偏差e过去的整个变化有关,这样的累加效应会使系统产生较大的累计偏差,让整个控制系统出现不良的超调现象。其中A,B,C是为了编程更加方便,优点是只需要计算三次采样周期的偏差值旧的计算出本次周期的控制变量▲U的增量。
以上只是在初次对PID控制算法中的学习心得,希望有助于前沿的前辈们学习掌控,后续也会对其它智能控制算法上的普及,比如遗传算法和粒子群算法,烟花算法等。
-
算法
+关注
关注
23文章
4657浏览量
93948 -
PID控制
+关注
关注
10文章
461浏览量
40648
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论